
Steps
- Overview
- Download ARC
- Install Visual Studio
- Create Project
- Example Project Overview
- Add Some Buttons
- Publish Skill To Technology Store
- More Information
- Troubleshooting
- UI Components
- Example: EZB Manager
- Example: Saving/Loading Configuration
- Example: Moving Robot
- Example: Move Servos
- Example: Theme Renderer
- Example: ControlCommand() Binding
- Example: Camera Control
- Example: Camera Custom Tracking Type
- Example: Global Script Variables
- Example: EZ-Script/Blockly Edit Control
- Example: EZ-Script Executor
- Example: Custom EZ-Script Function
- Example: Custom Movement Panel
- Example: Output Audio from EZ-B
- Example: Dependencies, Files and Sub Folders
- Example: Finding Other Behavior Controls
- Plugin Compliance
Example: Moving Robot
If your plugin is to make a robot move, it doesn't need to know anything about the robot.
ARC uses a concept of "Movement Panels". Users can only add one Movement Panel per project, and this is how their robot moves. When a Movement Panel is added to a project, it binds itself to a common class that is exposed to the plugin system. This allows your program to easily tell the robot to move forward, left, right, stop, etc. regardless of the Movement Panel the user has added. This means if the robot is a humanoid, it will walk forward using the project's own method of walking. If the project is a hexapod, it will do the same. If the robot is a drone, it will also do the same. So for your plugin, it doesn’t matter what kind of robot it is - you simply tell it to move a direction. And here’s a few examples...
ARC.EZBManager.MovementManager.GoForward();
ARC.EZBManager.MovementManager.GoReverse();
ARC.EZBManager.MovementManager.GoRight();
ARC.EZBManager.MovementManager.GoRollLeft();
ARC.EZBManager.MovementManager.GoUp();
Etc...
Within that Movement class, there are methods for moving in all directions. Up, Down, Left, Right, Stop, etc.. Not all movement panels will support Up, Down, RollLeft, RollRight as those are generally reserved for used with flying drone robots - but you get the point
Note: It is important to note that all native ARC Movement Panels use the movement class, as it is standard practice to put the movement servos/hbridges on the first EZB when designing a robot.

Thanks for the quick response.
This what happens when you are working on robotics when its way past your bed time.
You miss the obvious
No problem - i get it
Sorry but can I ask you something why I didn't see the ARC library when I added visual studio even though I set up the C ++. DLL library and there's another way to execute it and send / receive console in out but I don't know how to do it with EZ_builder?Please follow the tutorial. It’s impossible to know why you’re plug-in isn’t showing up without asking you if you followed each step of the tutorial . Reviewing your screenshots, it doesn’t appear as if any of the tutorial steps have been followed.
. Reviewing your screenshots, it doesn’t appear as if any of the tutorial steps have been followed.
Hi i fixed it. thanks
Hello, I am trying the tutorial to get the robot to speak. I am using Visual studio. Currently, the sound is output from the pc instead of the robot. Is there a code I can attach so that the sound comes from the robot speakers instead of the pc?
Look in this tutorial for the step labeled "output audio from ezb". It’s lower down in the list. There’s instruction examples for either playing audio (ie mp3) or text to speech.
Error: the referenced component" EZ_builder,EZ_B" could not be found, DJ Sure i hope you can help me !
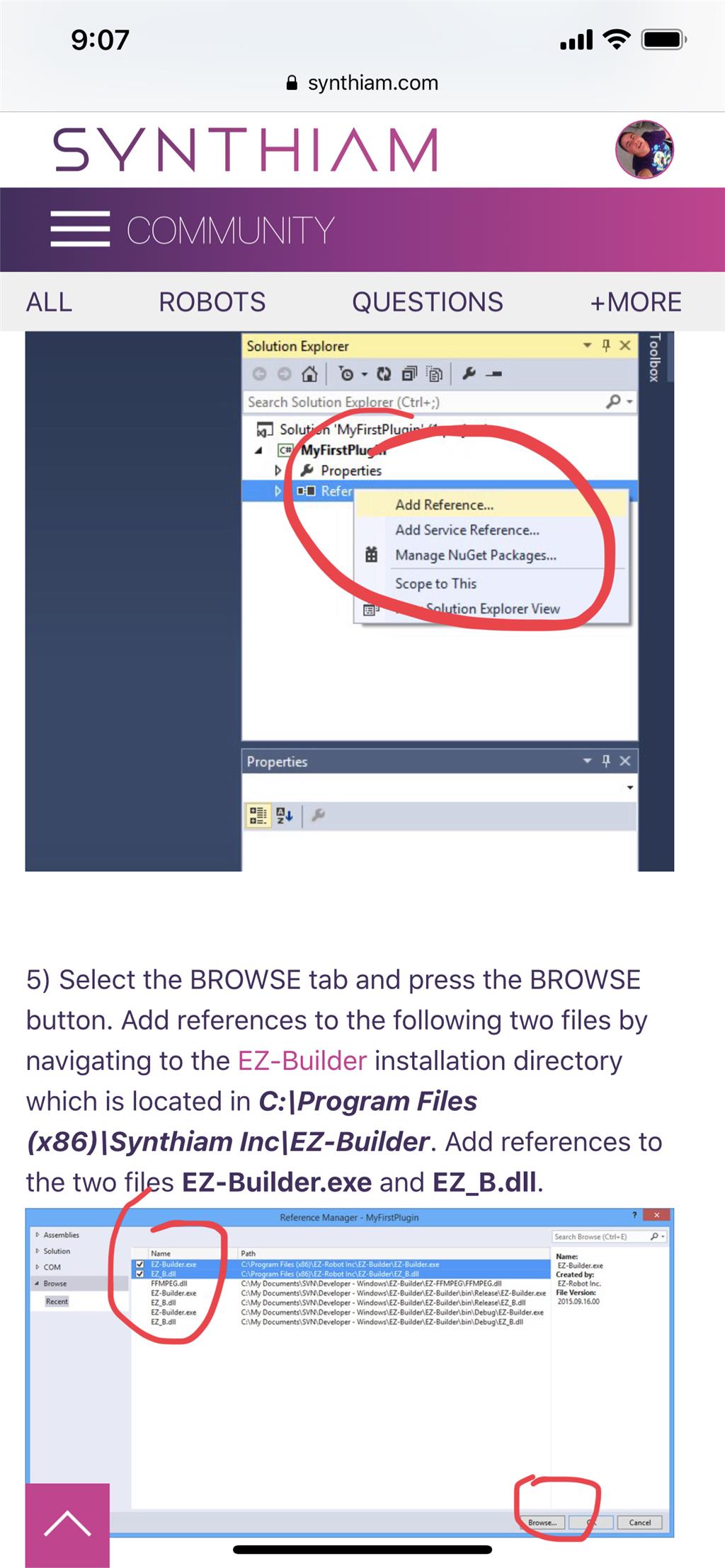
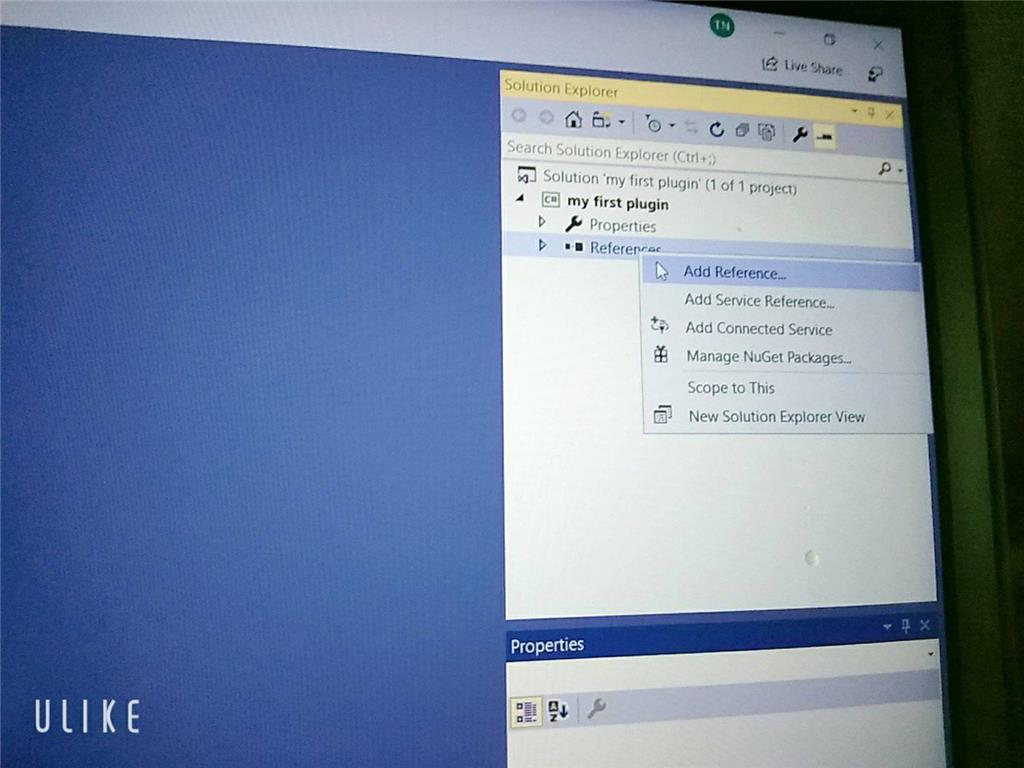
Joinny, you have to add the referencing by following the instructions in this tutorial. They are outlined with step by step to easily follow. Click add references, and browse to the appropriate files as directed in the tutorial. I can’t write anything clearer in response. The step to add references is incredibly clear but you’re skipping it.