Example: EZB Manager
The ARC.EZBManager is a helper class that makes accessing I/O very easy, by doing the complicated work for you. Within the EZBManager are methods to read adc, read digital, set digital, set servo positions, etc..
The ARC.EZBManager also has an array of EZB objects. Each EZB object is a physical EZB. This is an array because the user’s project can have up to 128 EZ-B’s defined. It’s always safe to assume that the first (index zero) EZ-B is default, which is why EZBManager.EZBs[0] is commonly used for raw commands that are not using the EZBManager helper methods.
It is highly recommended to use the ARC.EZBManager instead of raw commands directly to the EZB. Here are some examples of using the ARC methods, to demonstrate how much more convenient they are for moving servos, specifically...
ARC.EZBManager.SetServoPosition(_cf.SERVOS[ConfigurationDictionary._VERTICAL_SERVOS], 20);
ARC.EZBManager.SetServoIncrement(_cf.SERVOS[ConfigurationDictionary._HORIZONTAL_SERVOS], -1);

Thanks for the quick response.
This what happens when you are working on robotics when its way past your bed time.
You miss the obvious
No problem - i get it
Sorry but can I ask you something why I didn't see the ARC library when I added visual studio even though I set up the C ++. DLL library and there's another way to execute it and send / receive console in out but I don't know how to do it with EZ_builder?Please follow the tutorial. It’s impossible to know why you’re plug-in isn’t showing up without asking you if you followed each step of the tutorial . Reviewing your screenshots, it doesn’t appear as if any of the tutorial steps have been followed.
. Reviewing your screenshots, it doesn’t appear as if any of the tutorial steps have been followed.
Hi i fixed it. thanks
Hello, I am trying the tutorial to get the robot to speak. I am using Visual studio. Currently, the sound is output from the pc instead of the robot. Is there a code I can attach so that the sound comes from the robot speakers instead of the pc?
Look in this tutorial for the step labeled "output audio from ezb". It’s lower down in the list. There’s instruction examples for either playing audio (ie mp3) or text to speech.
Error: the referenced component" EZ_builder,EZ_B" could not be found, DJ Sure i hope you can help me !
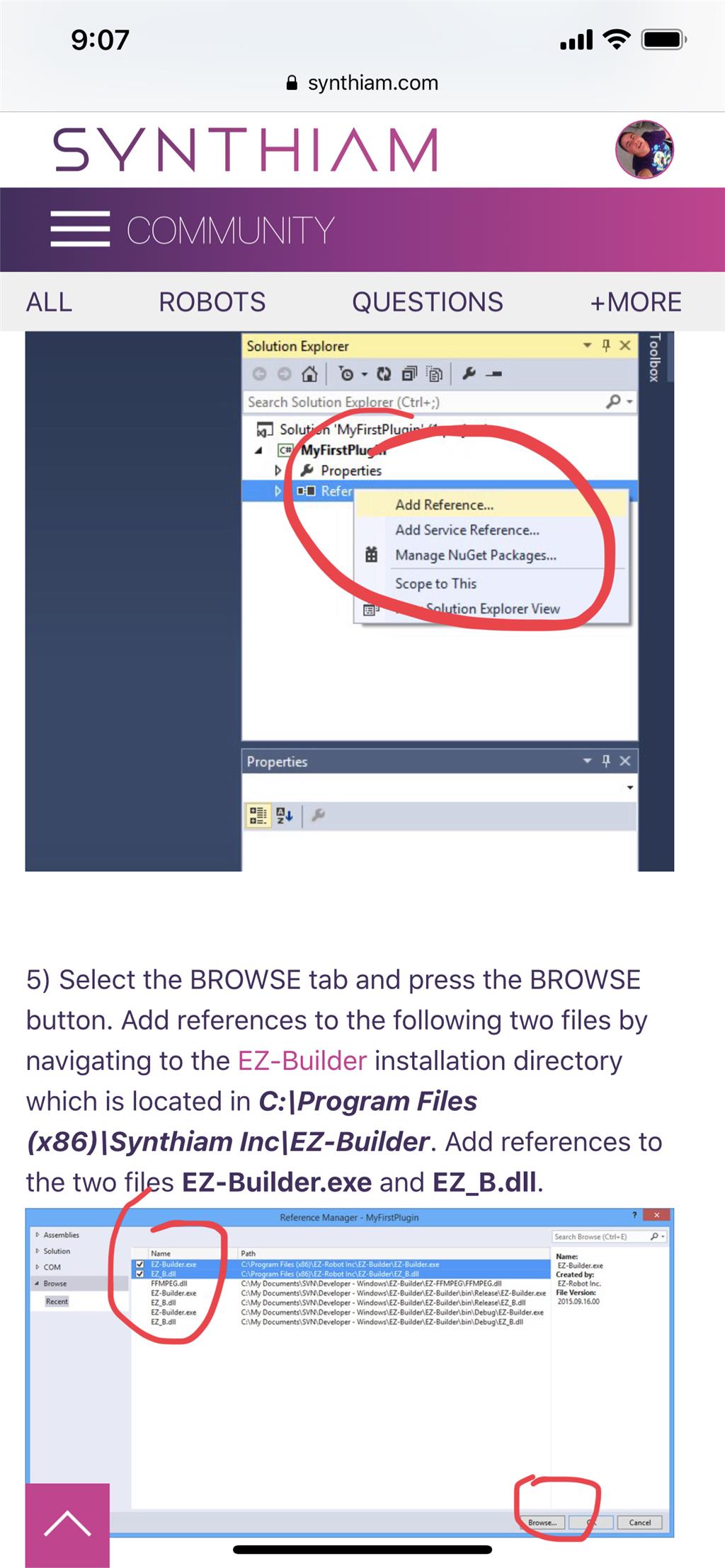
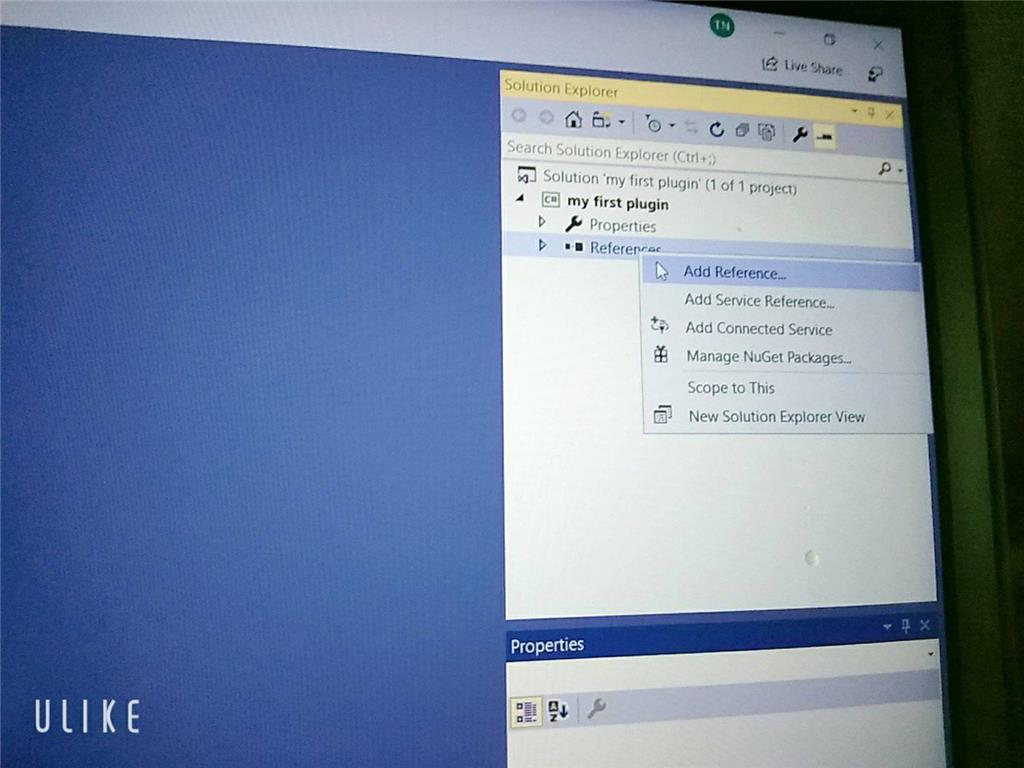
Joinny, you have to add the referencing by following the instructions in this tutorial. They are outlined with step by step to easily follow. Click add references, and browse to the appropriate files as directed in the tutorial. I can’t write anything clearer in response. The step to add references is incredibly clear but you’re skipping it.