










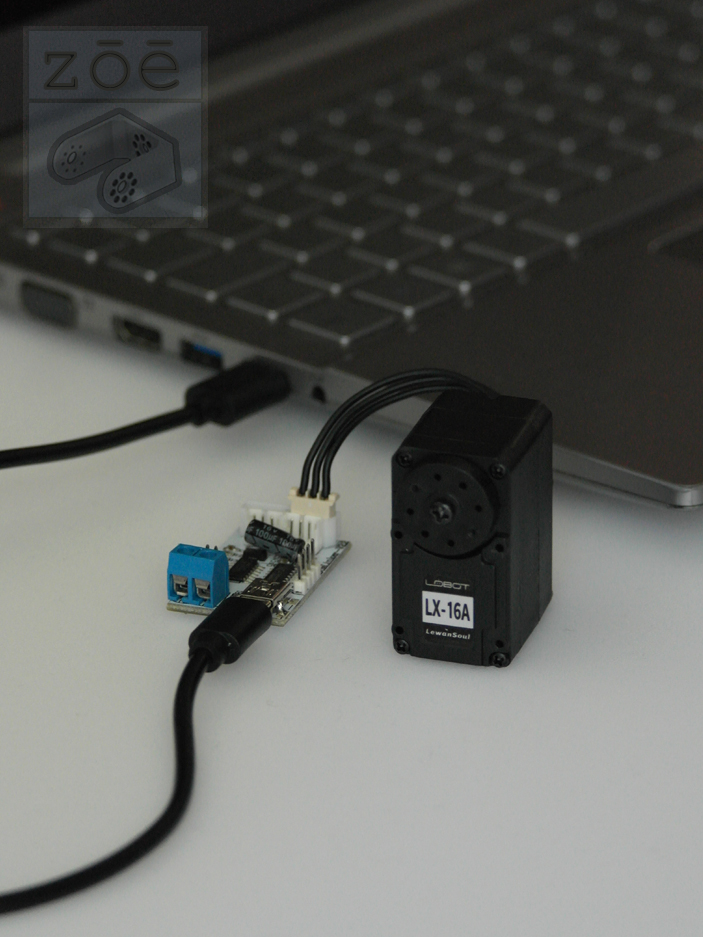
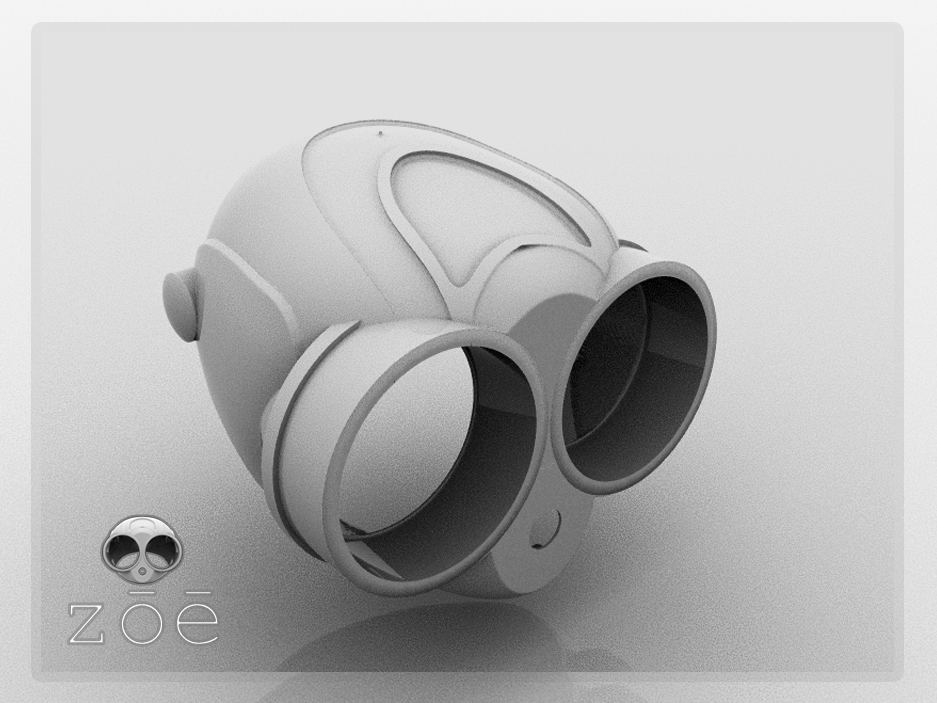


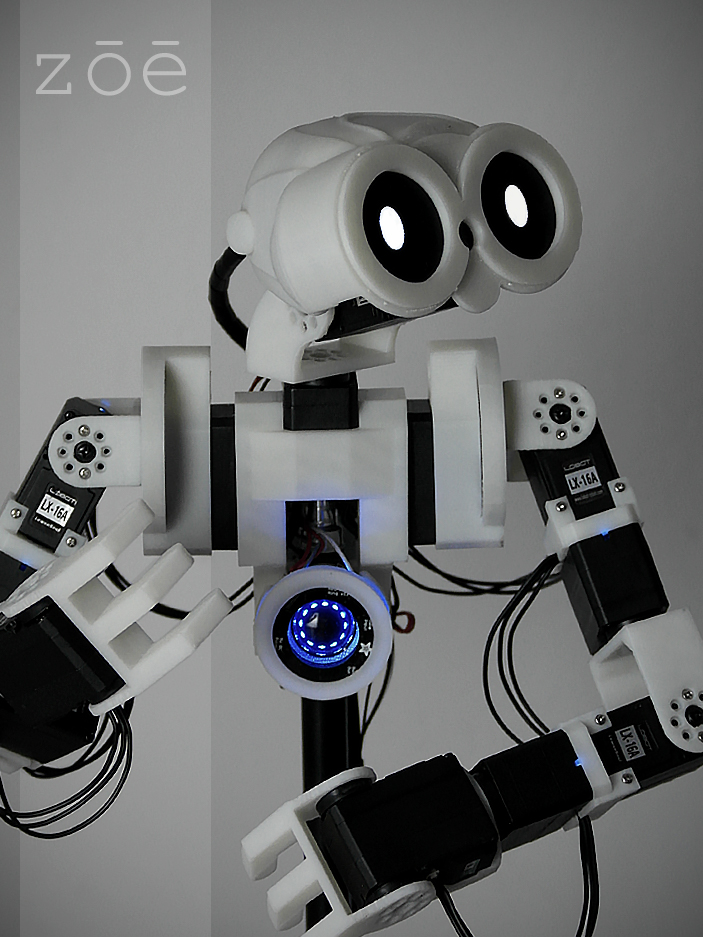

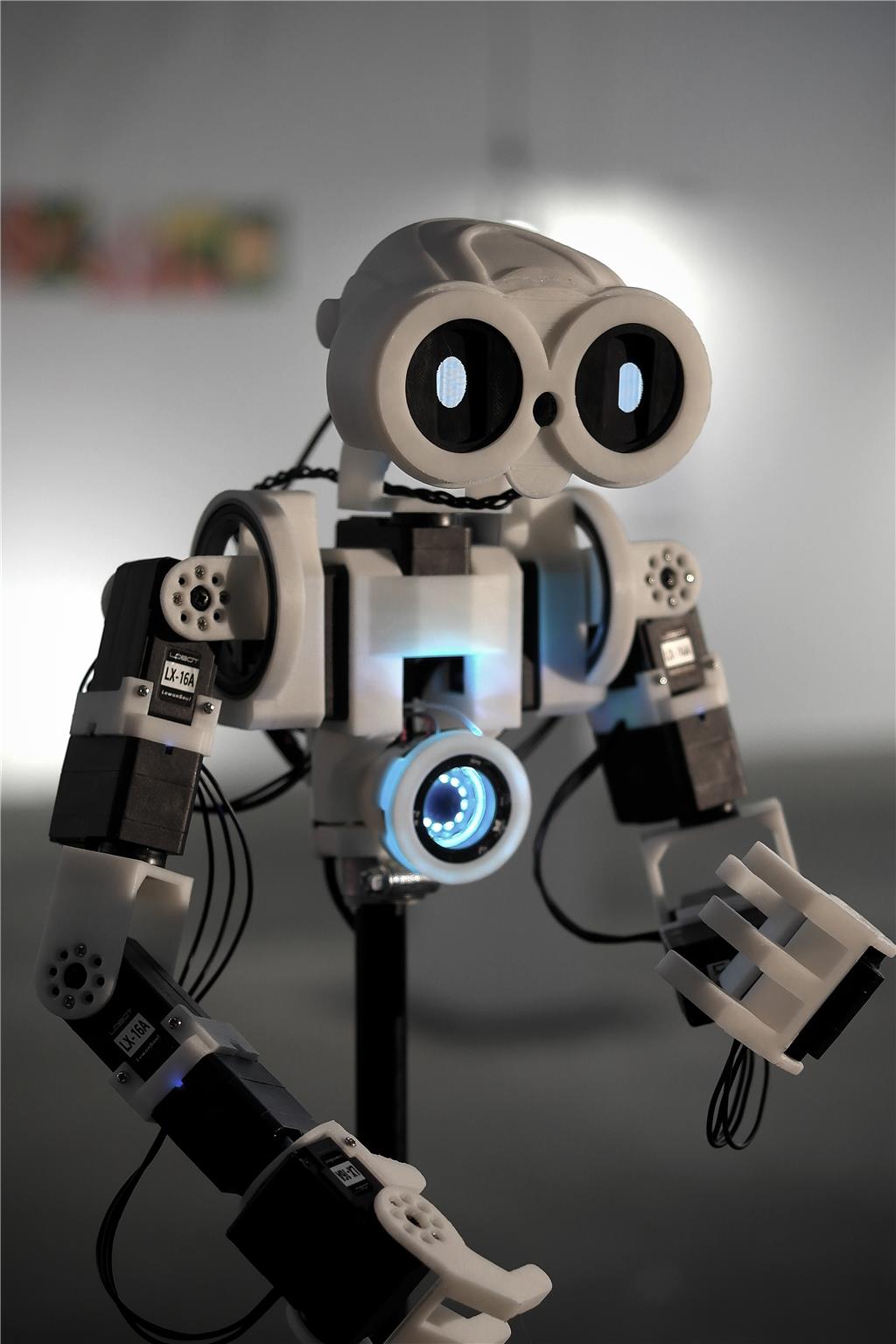

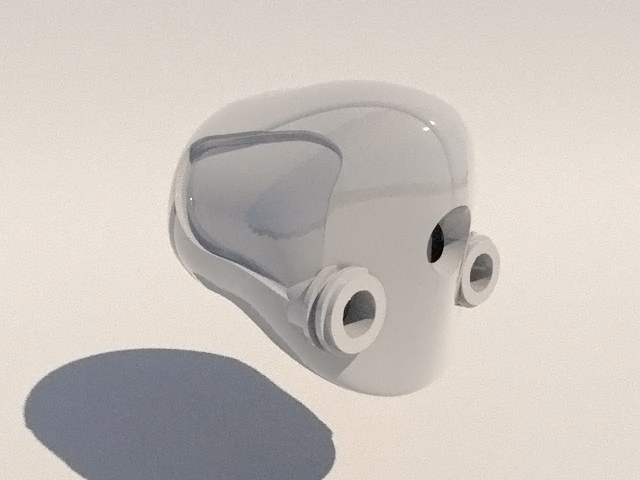
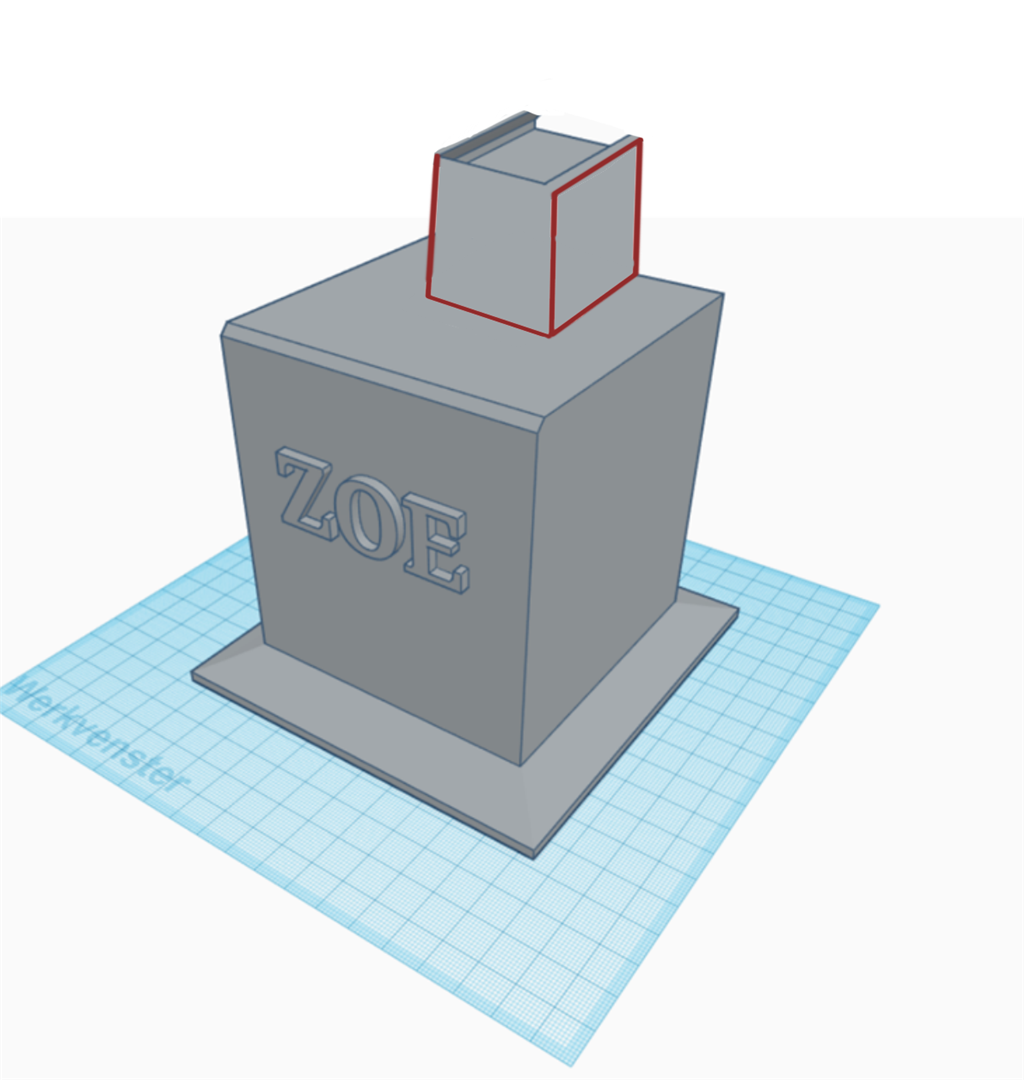

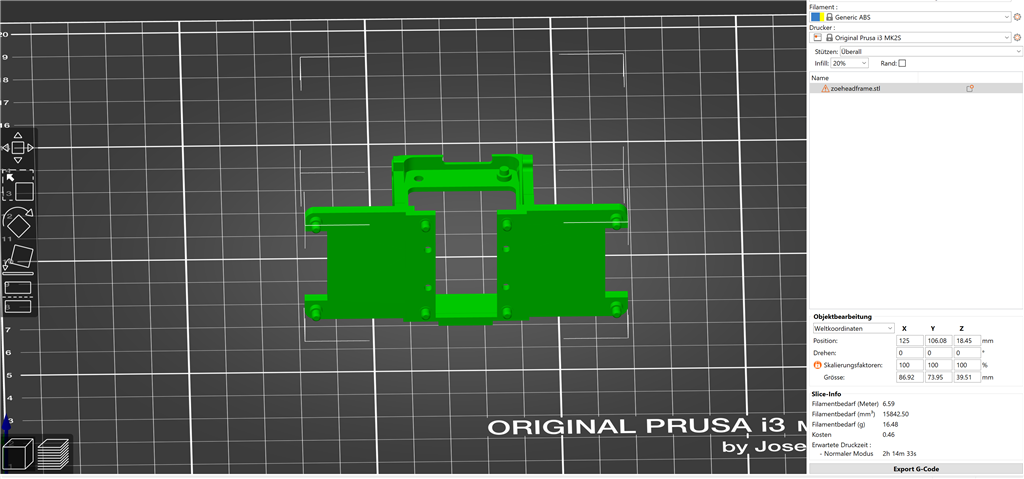
Since my robot is running on a Raspberry Pi, which is now supported by ARC, I decided to evolve my current project K[8] into a new one called ZOE... First steps will creating a new servo setup which supports Dynamixel Servos, and a new Conceptual design!!
By Mickey666Maus
— Last update
Discover more robots
Billderwent's Boris!
EzB robot built from Meccano parts, servos, cable ties and torch-mounted camera, with steering linkages,...
DJ's Master Blaster Robot
Remote-controlled 1980s-style animatronic robot with servos for arms/head and wheeled mobility, controlled via Synthiam...

Joseph4760's Wall-E To Wall-E-Nator
Wall-E-Nator custom build: Wall-E U-Command fused with Terminator parts, mid-build, adding LEDs, camera and painting...

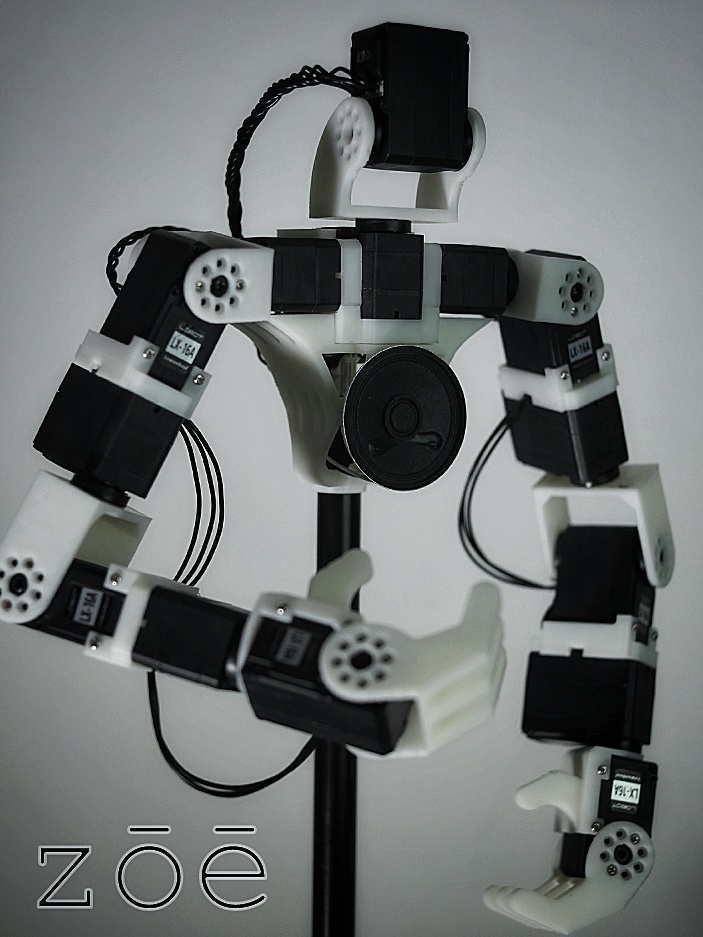
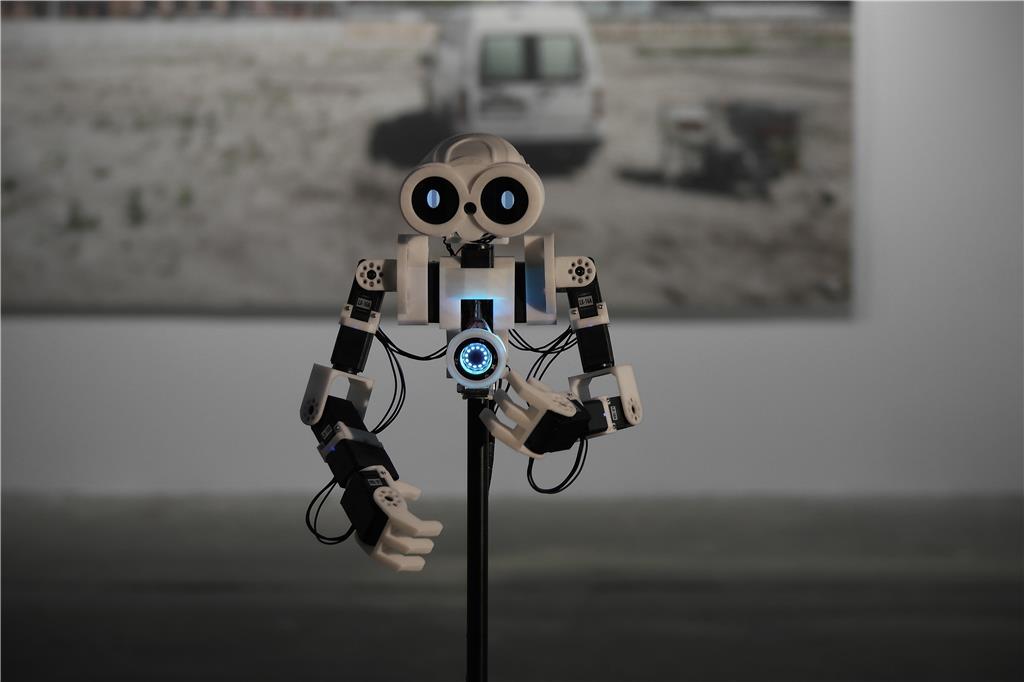
It is just a tripod...so maybe I need a more sturdy tripod or some other kind of base! I guess those Inmoov robots are also sitting on a tripod right?
How did you get the one in your office stabilized and not tripping over when lifting an arm?
Our inMoov has a couple bases, one is a heavy wheel chair base with a heavy 12V battery and the other is a toilet flange mounted to a piece of wood that can be clamped to a solid table. *Edit added a picture
mounted to a piece of wood that can be clamped to a solid table. *Edit added a picture
Screwing the whole thing to some heavy base was also something I considered!! But the tripod is kind of nice, because it makes the robot very portable...
Thanks for the pic, nice setup!!
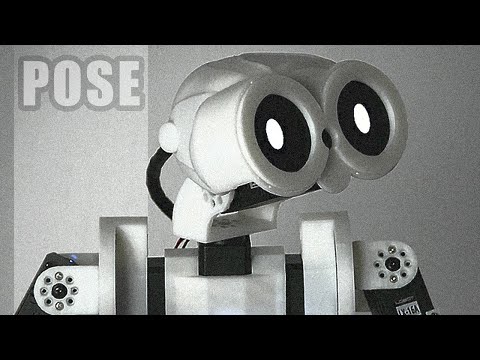
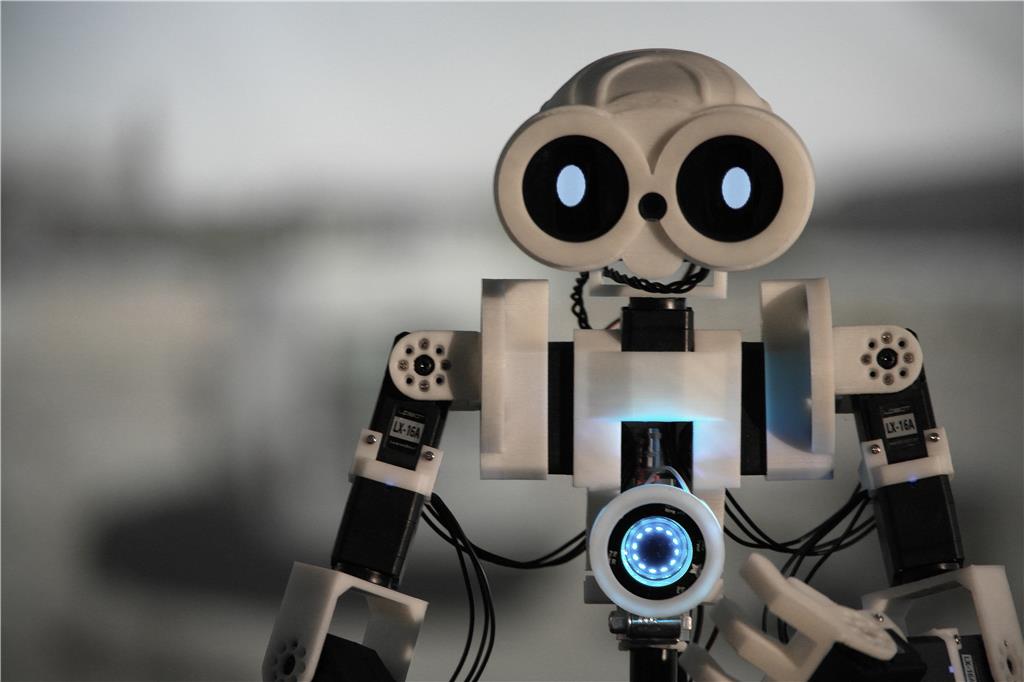
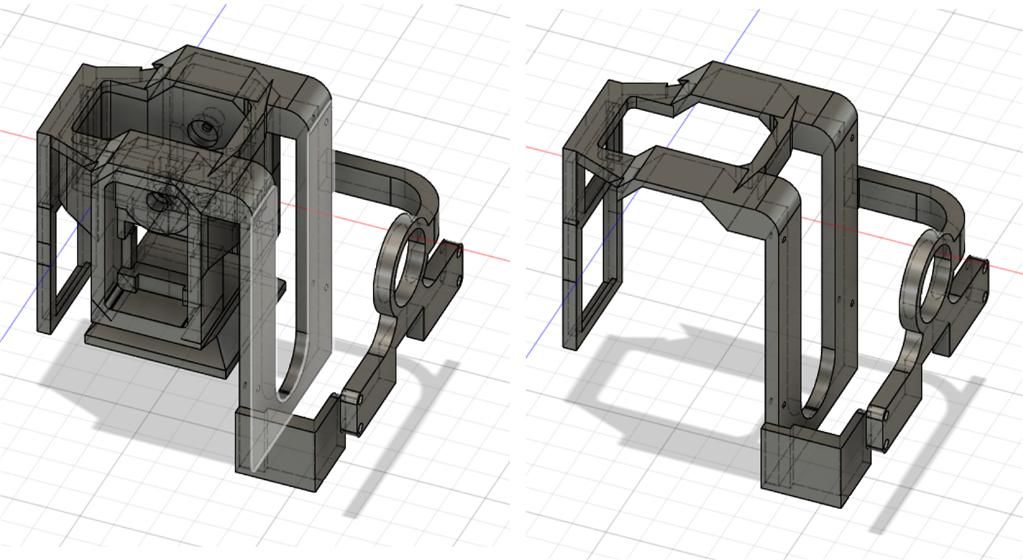
Hey, I am having another question here, I was looking at a lot of robot builds and the setup is most of times kind of the same as I build it...
But now that I started to do some motion tests, I realized how much weight there is on those shoulder servos. Its the weight combined with the angle, that worries me a bit!
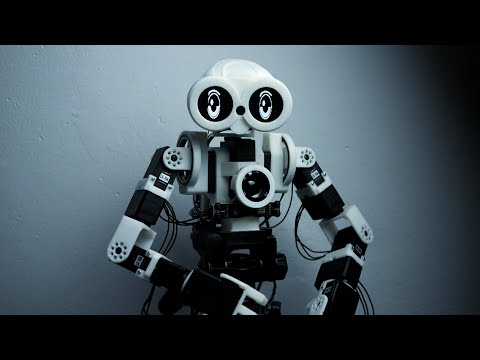
Would you keep the design as it is, or should I add some stress relive to those shoulder joints?
I was thinking of building something kind of like a big ball-bearing, maybe using soft air bullets... The diameter would be the same as the shoulder hinge, and could help stabilizing this particularly heavy loaded joint?
Or maybe even buying a crossed roller bearing could be an option, since it can handle the load in axial and radial direction?

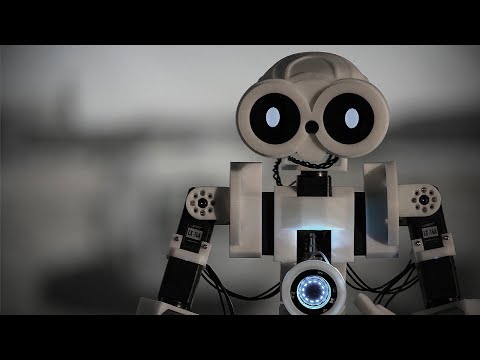
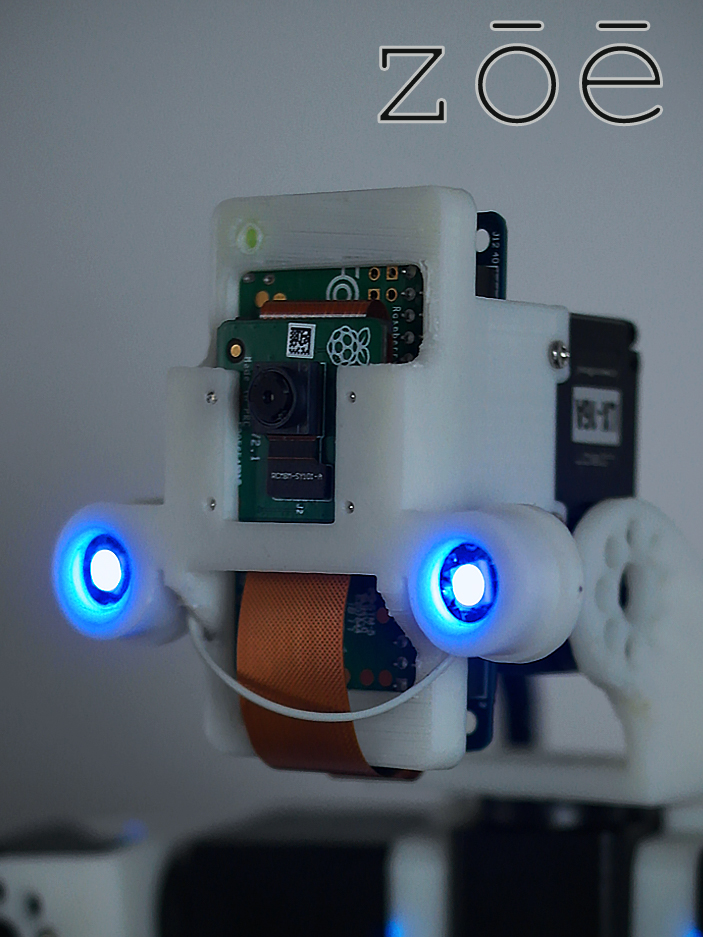
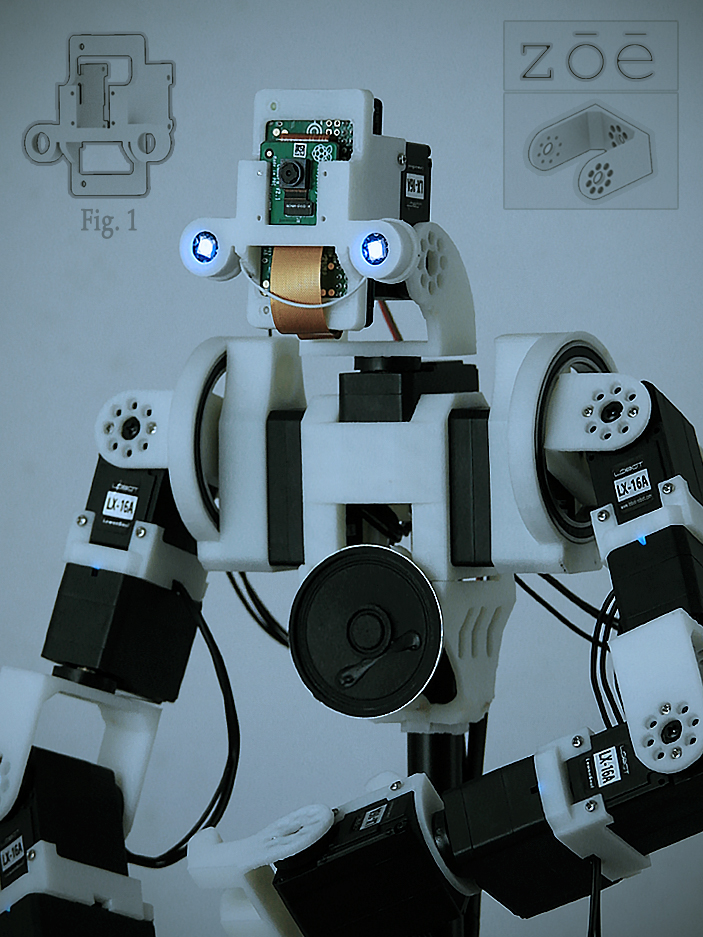
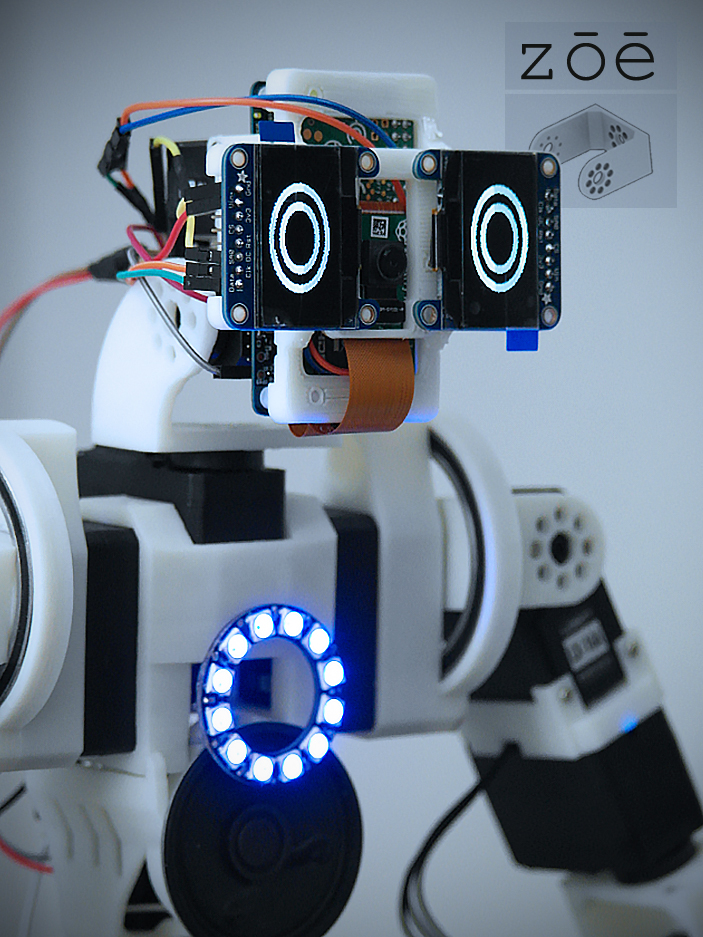
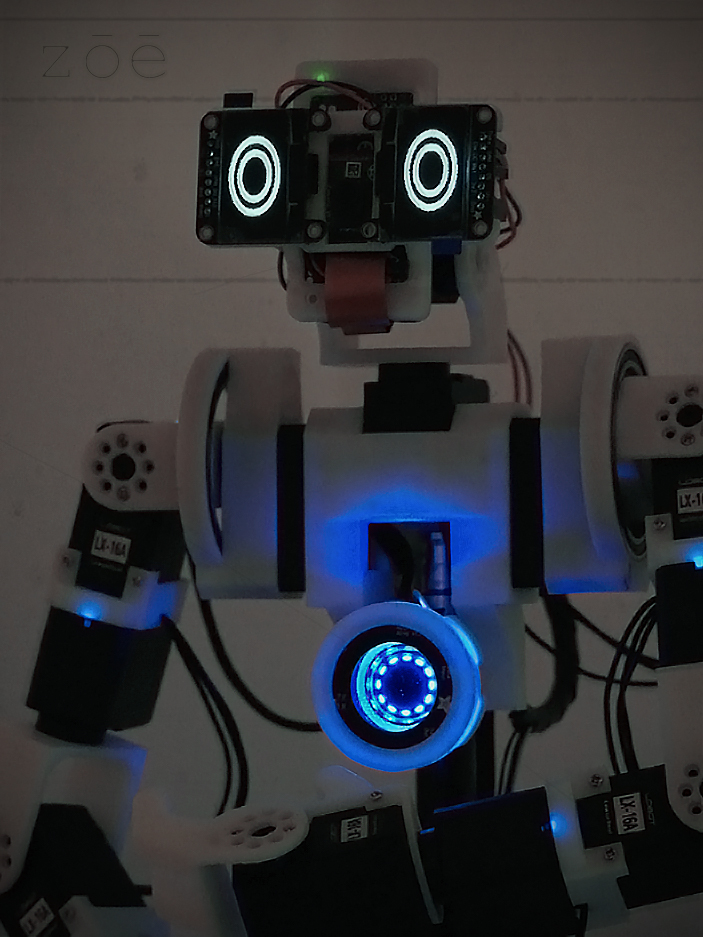
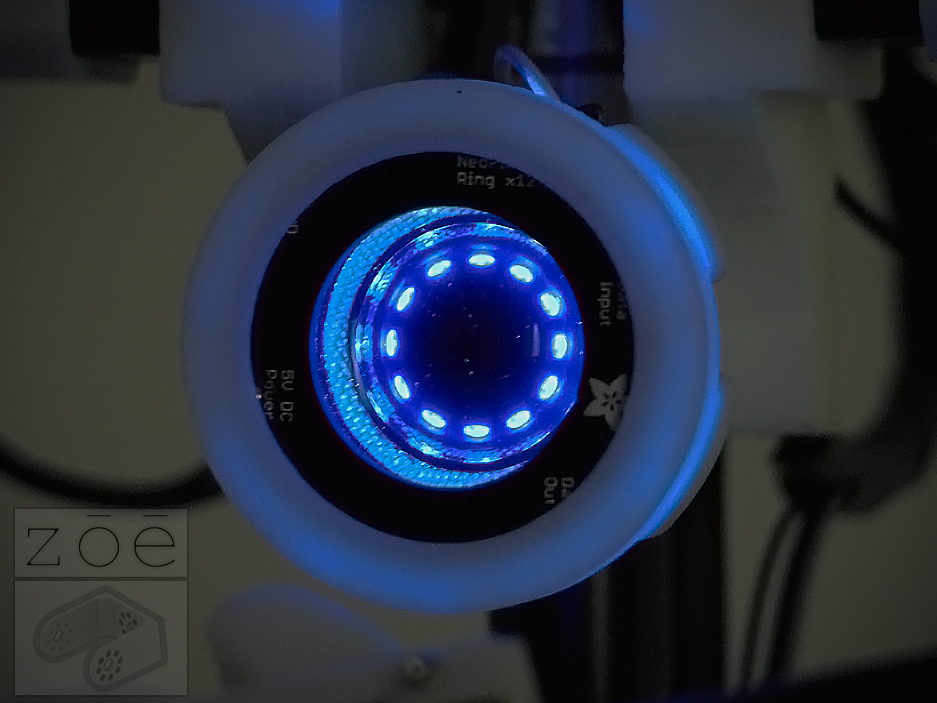
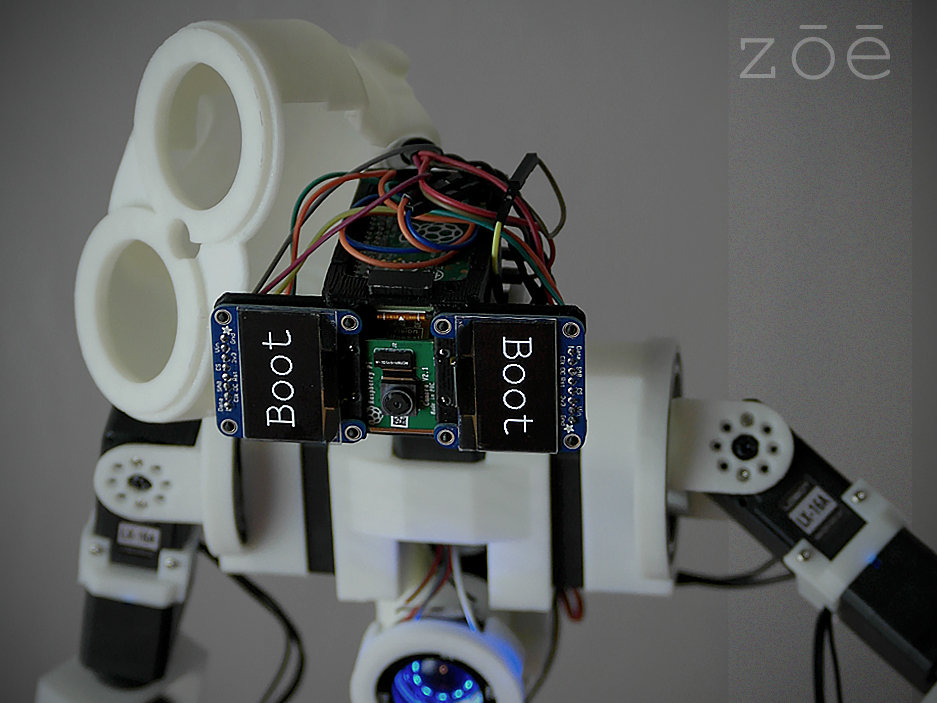
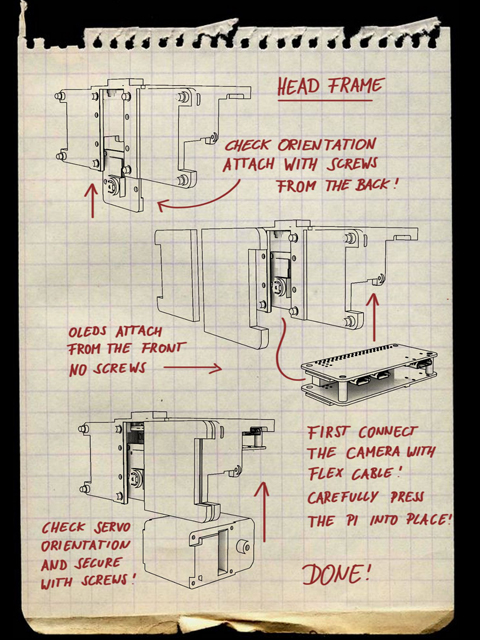
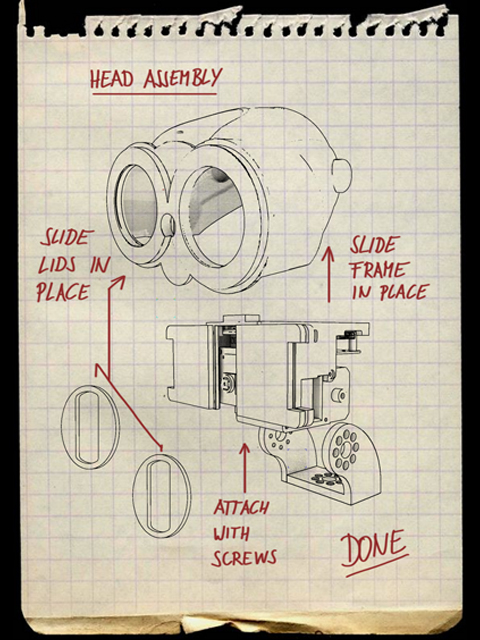
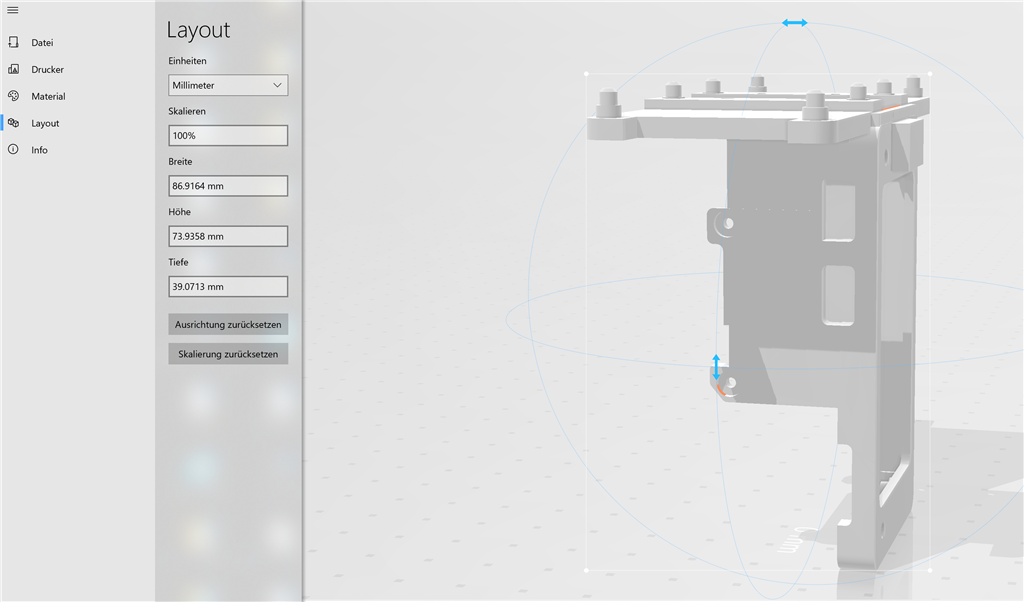
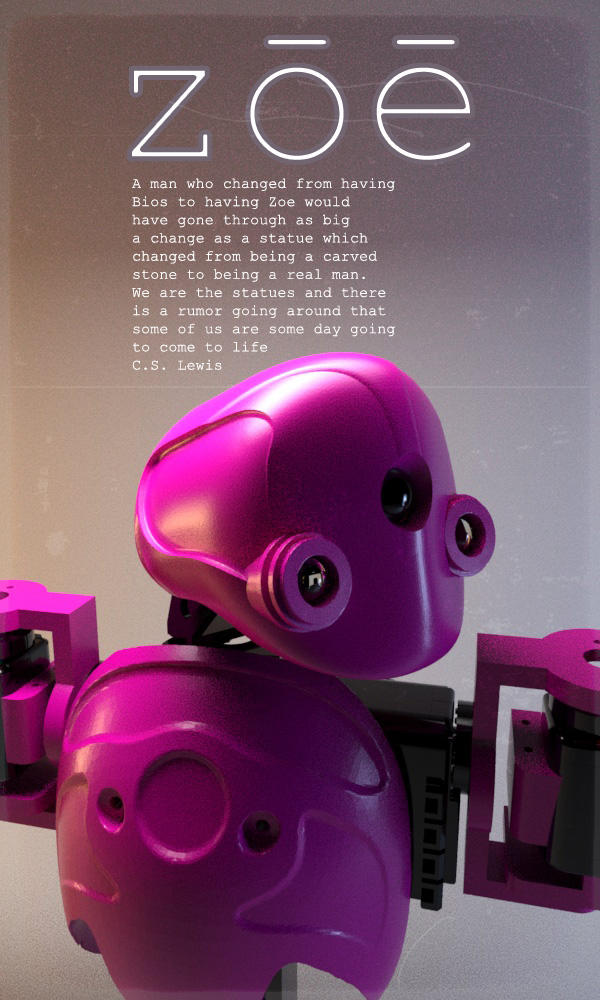
So finally I got all the electronics needed attached to the head servo! For now there are, two Neopixel, and a Rasperry Pi Zero plus camera. The Rasperry Pi Zero also has the AIY Vision Bonnet, for offline object classification and emotion recognition...Very cool work! Hope to see ZOE moving about soon.
reinforments is always a good thing.your desing is stunning.
Hey Mickey, That's a really nice looking design. Artistic and functional. Great job so far.