














Since my robot is running on a Raspberry Pi, which is now supported by ARC, I decided to evolve my current project K[8] into a new one called ZOE... First steps will creating a new servo setup which supports Dynamixel Servos, and a new Conceptual design!!
By Mickey666Maus
— Last update
Discover more robots

Hstud's Hunters1st Robot Sam
DIY robot S.A.M. built by 8-year-old Hunter using EZ-Robot v3 and simple parts, dollar-store body, PVC arms, LEDs and...
Pirumpi's Ez-B, I Would Like You To Meet Nodejs
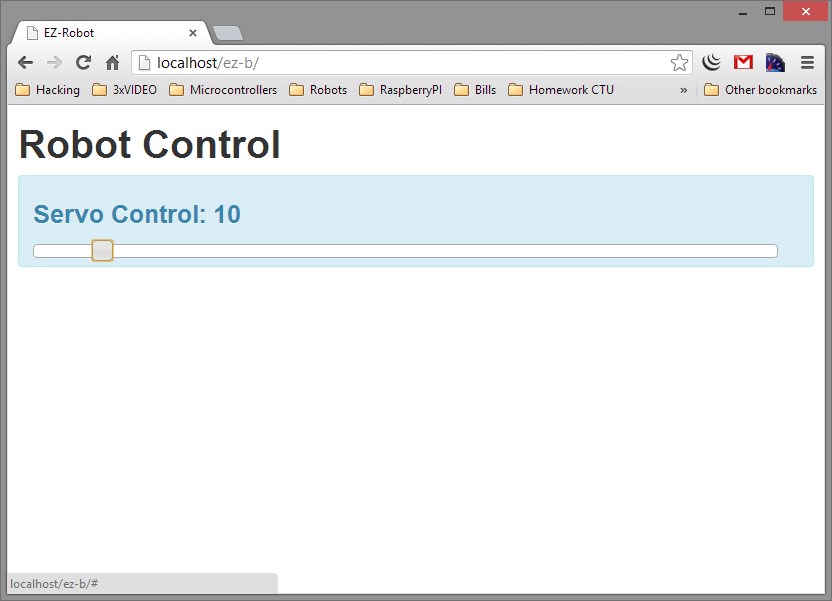
Control EZ-B robots from web and phone using a Node.js module via Synthiam ARC TCP interface with jQueryMobile and...

Lumpy's Lumpy's Roomba Rover
Upgrade Arduino 4WD chassis with Roomba wheels for straighter motion; H-bridges mounted, connectors pending, EZ-B...

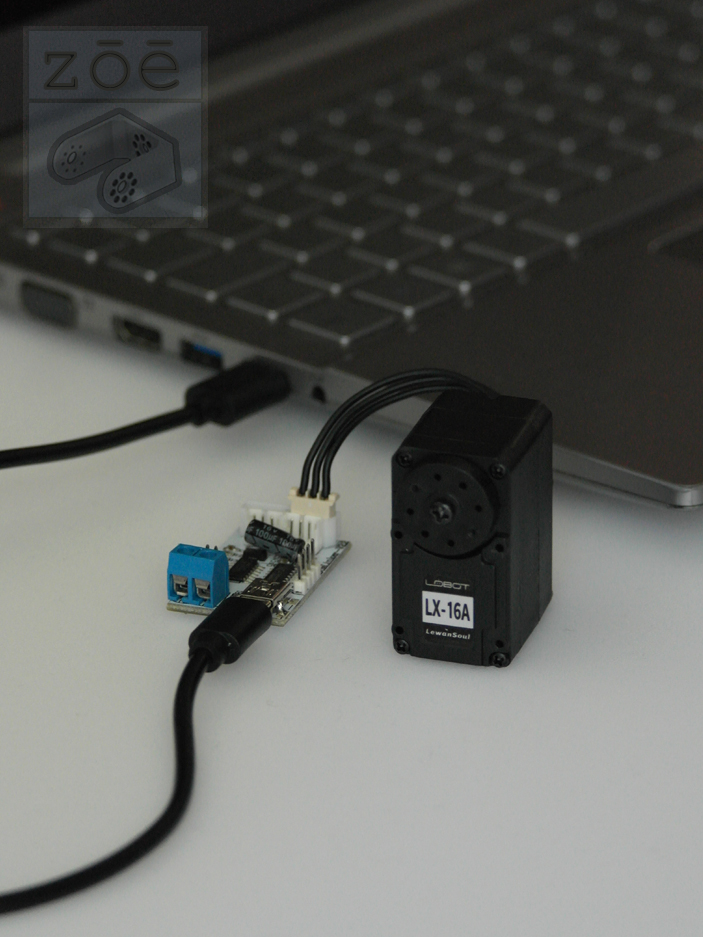
So finally I could make some time to continue with my new project... I tested the Dynamixel AX-12A and theLewanSoul LX16-A servos and decided to go for for LX 16-A...
I was kind of counterbalancing the ideas of having a well known brand which is fabricating consistent products, and is very known ( so there is a good forum and you will always find help for stuff that you cannot figure out by yourself )... And the cheaper product, which has not been around for that long and seems to be a bit like the cheap replica of the first one mentioned.
The thing that made me go for the LX 16-A was on one hand the price, which is one third of the Dynamixel, but mainly it was the ease of use...
I tried a lot to get the Dynamixel servo going, but driving it directly from my Raspberry Pi was not working for me!
But for the LX 16-A, I found a good library on Github, which works perfect, and can be used without any tweaking to control those servos with my Raspi! https://github.com/maximkulkin/lewansoul-lx16a
Also these servos are doing great with ARC so I do not loose any functionality of the ARC software!!
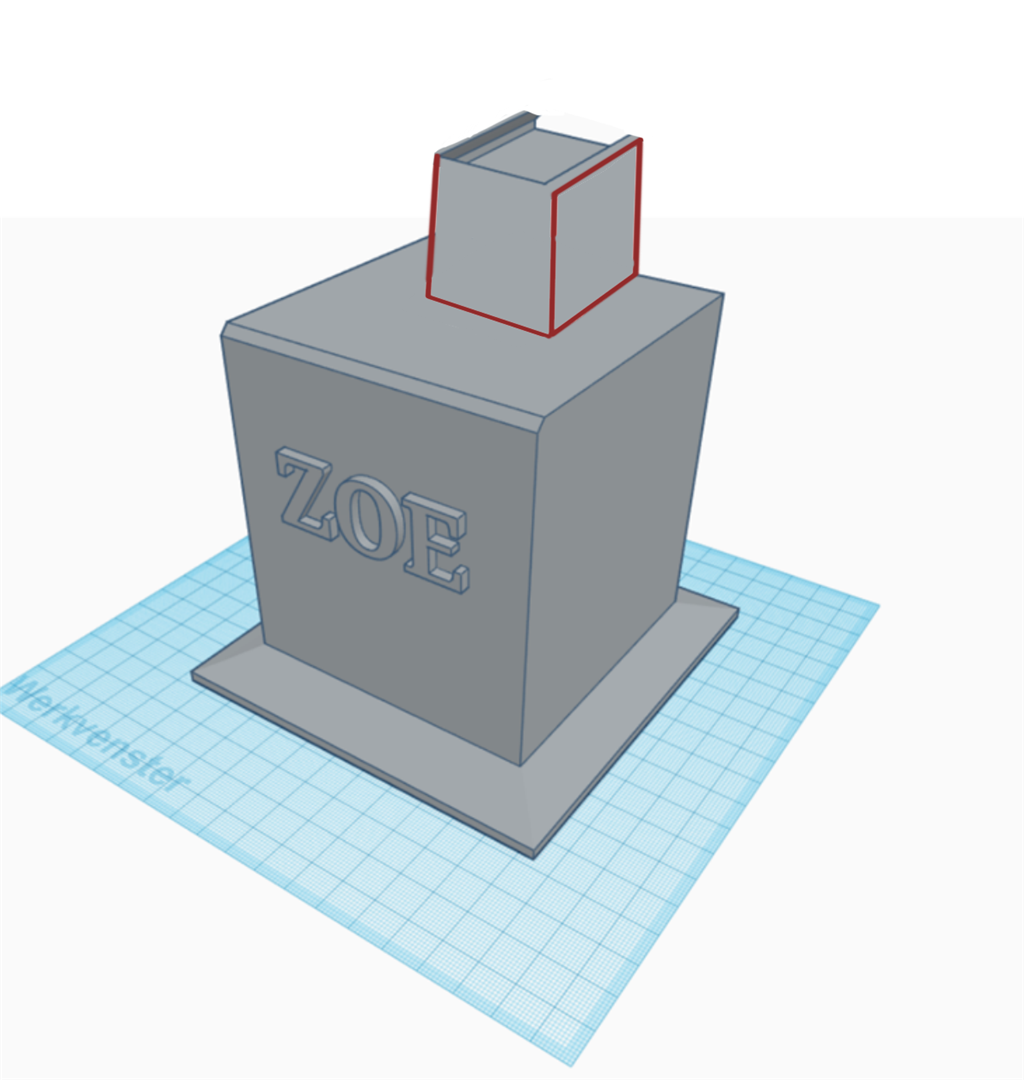
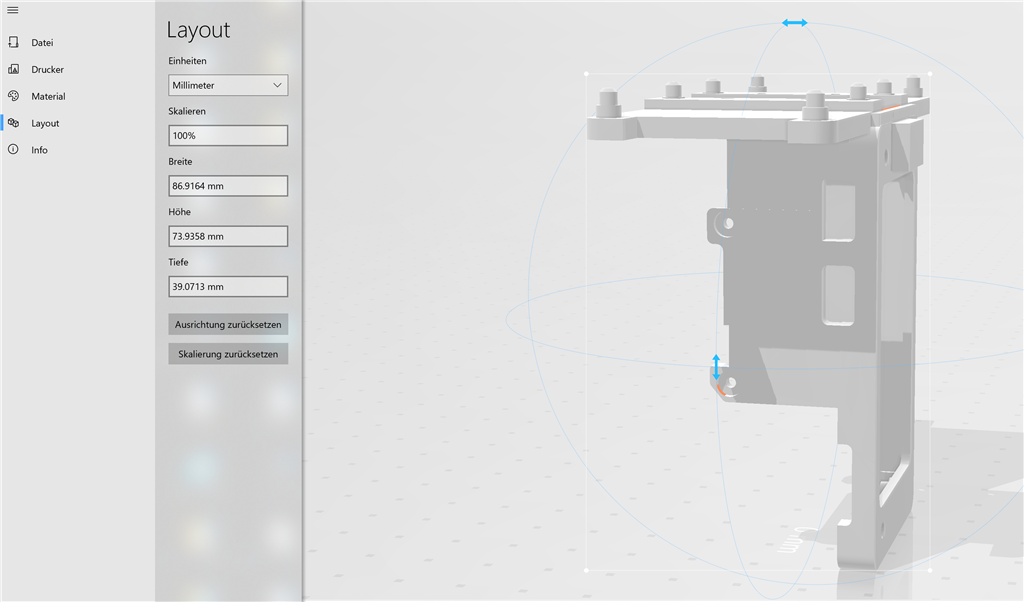
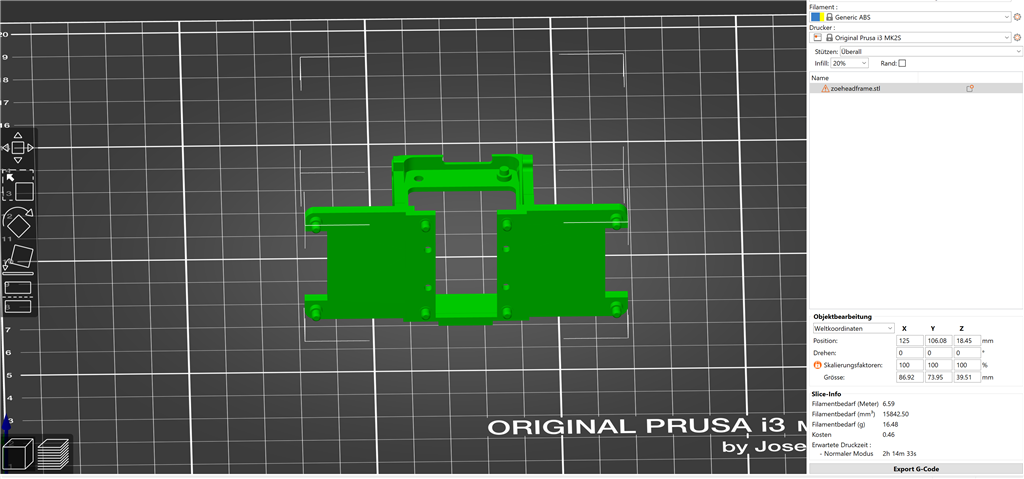
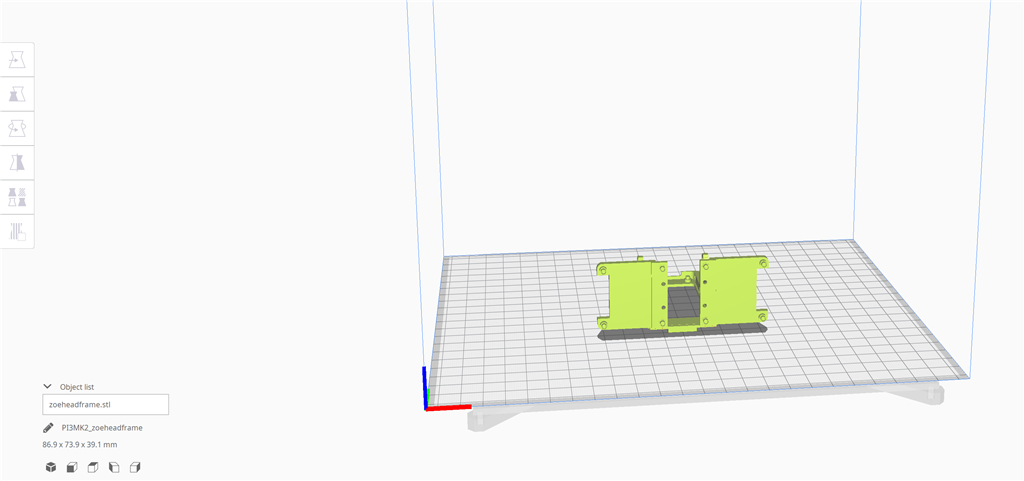
So I got down to design and print some parts, and am getting ready to move on with my robot!!
Hmmmm I cannot upload pictures...that is weird!!
It always gives me a comment already posted message...
edit
Now I got it to work...it seems like I had to post text and/or wait before I press the Submit Changes button? Strange...it would be nice if someone could look into this!
These are the parts that I managed to print so far, I hope I can make time to build the missing ones soon!


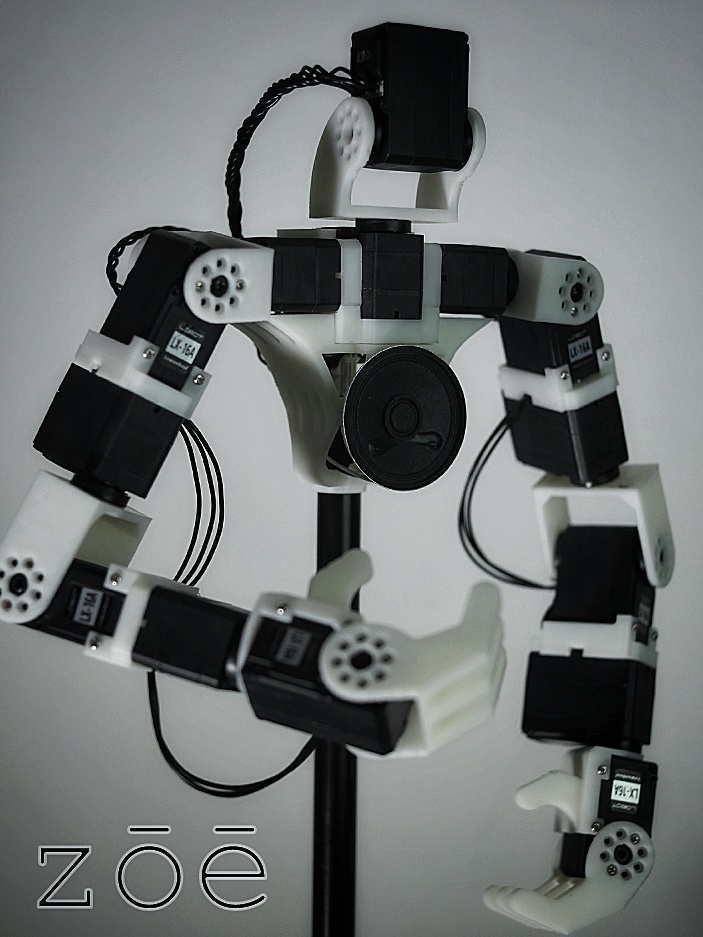
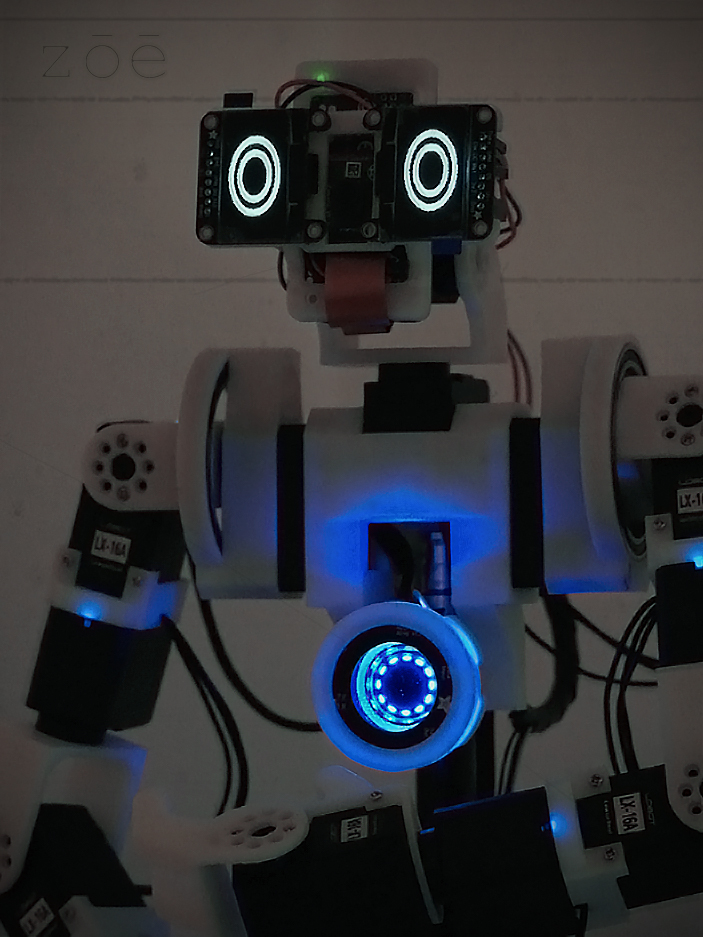
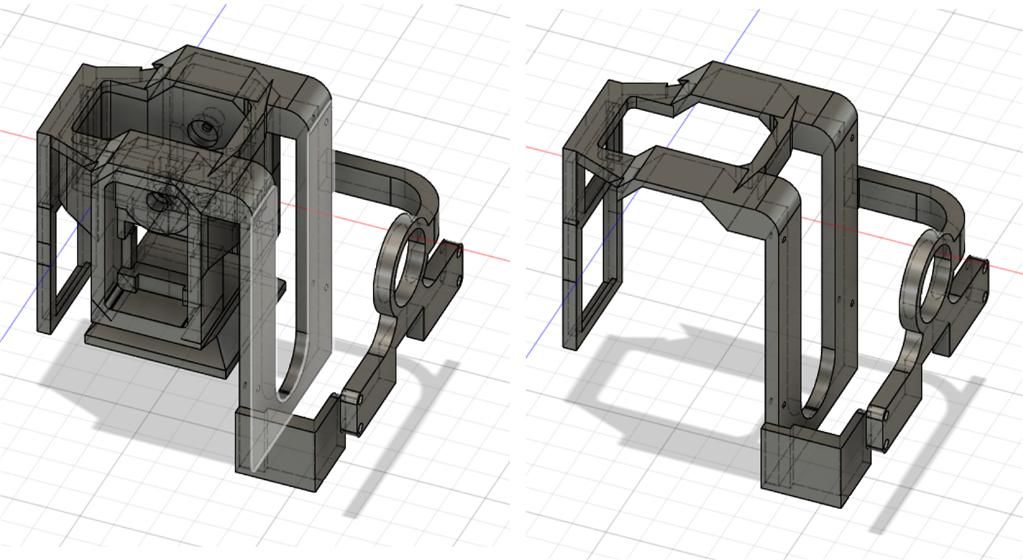
Still not done building all the joints, but I will be able to make some movement tests with this rig already!!And now comes the sad chapter of salvaging the parts from my former robot project!! I will try to keep at least the servo functionality, some boards will have to go though...
I will try to keep at least the servo functionality, some boards will have to go though...
Looking cool! Hope to see more soon.

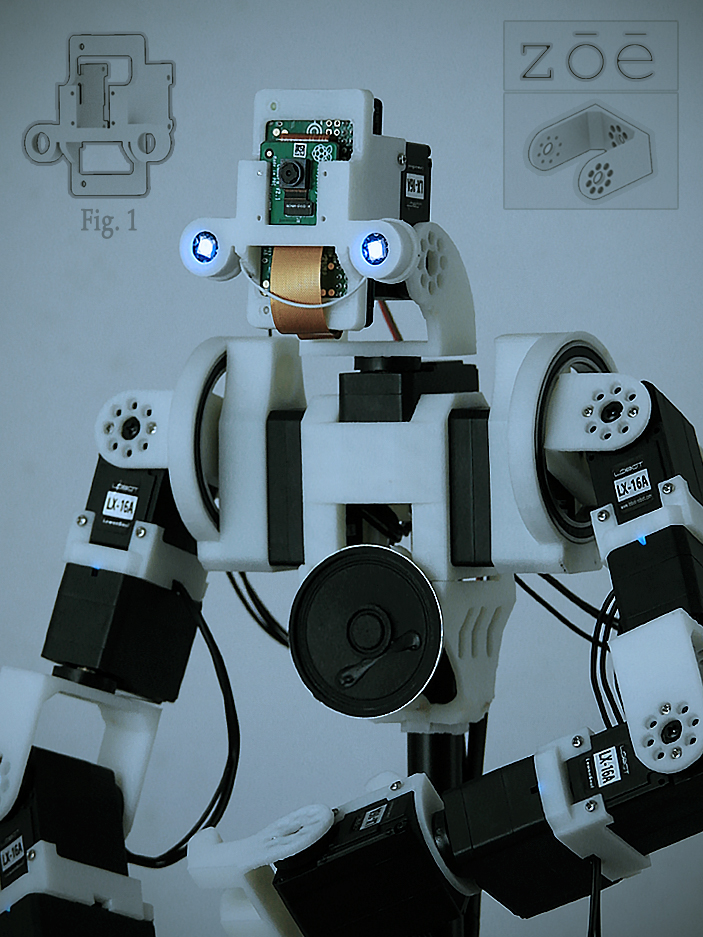
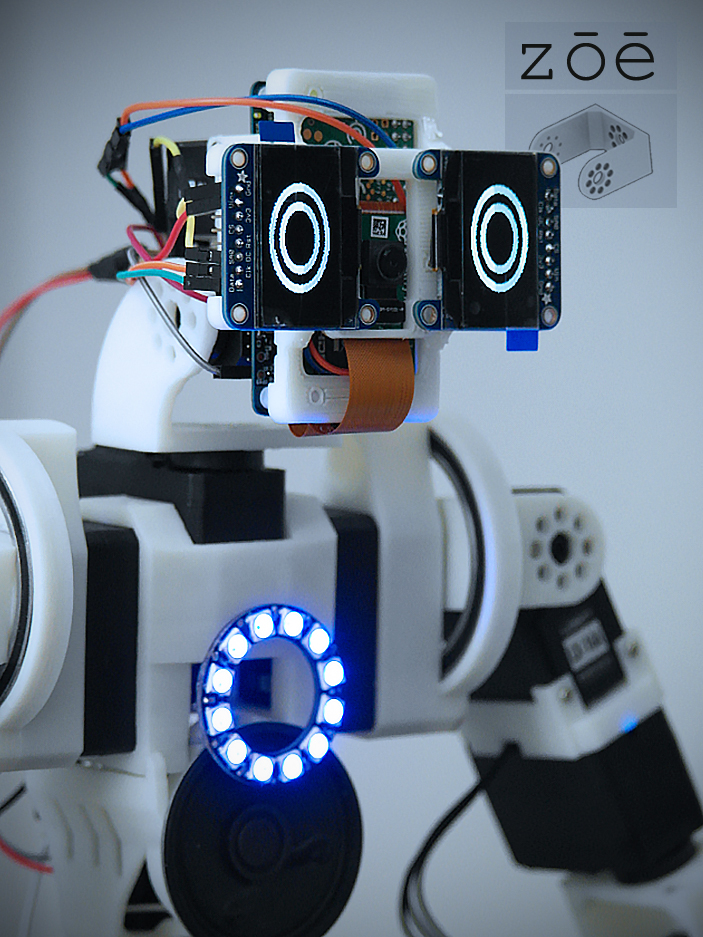
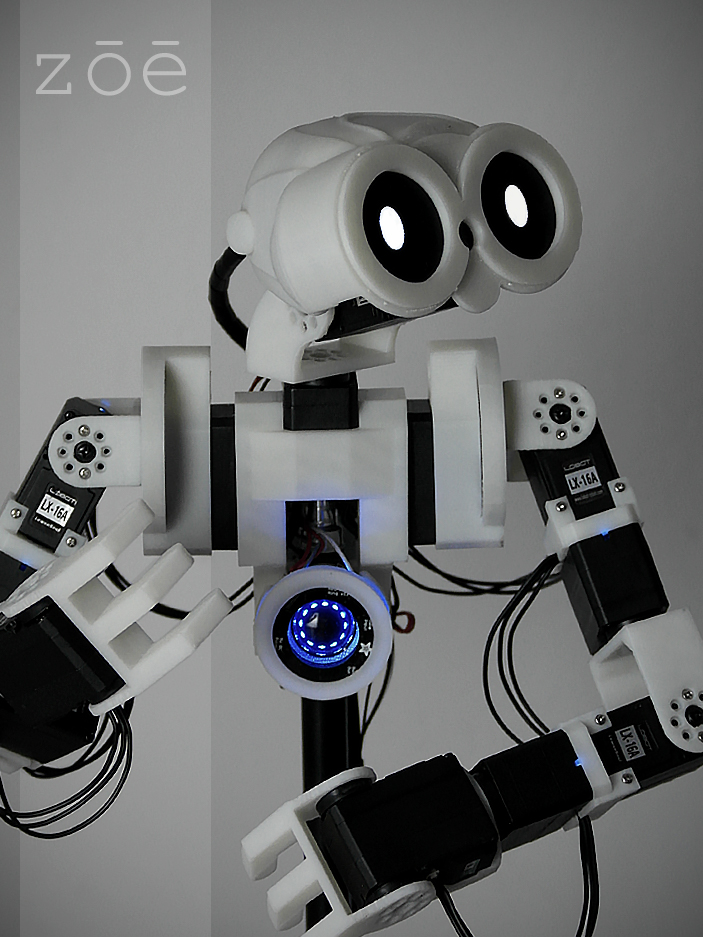
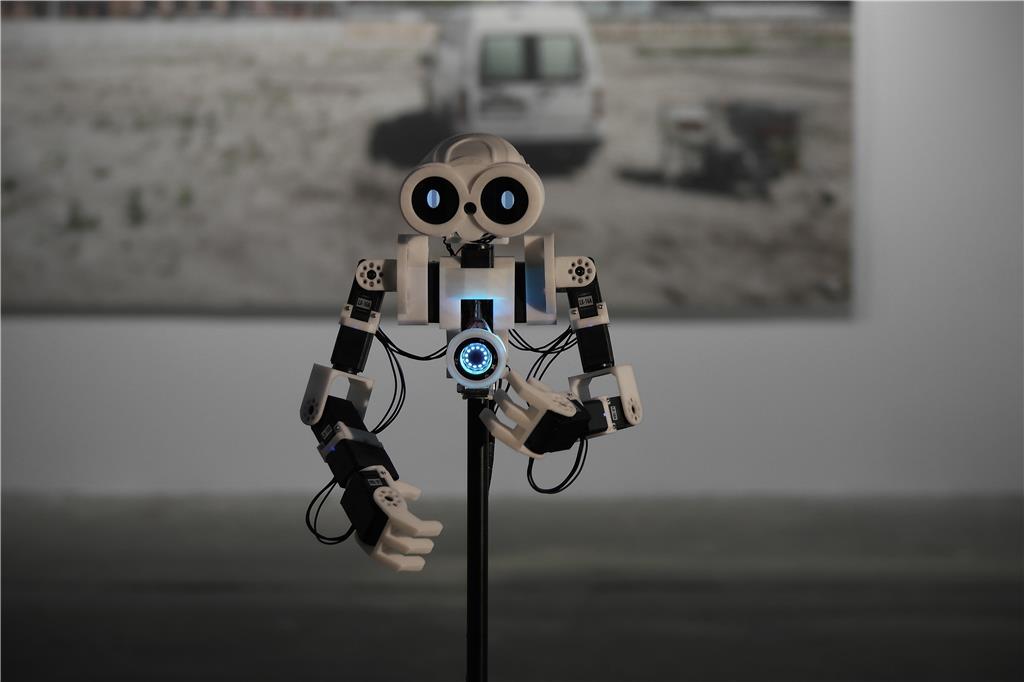
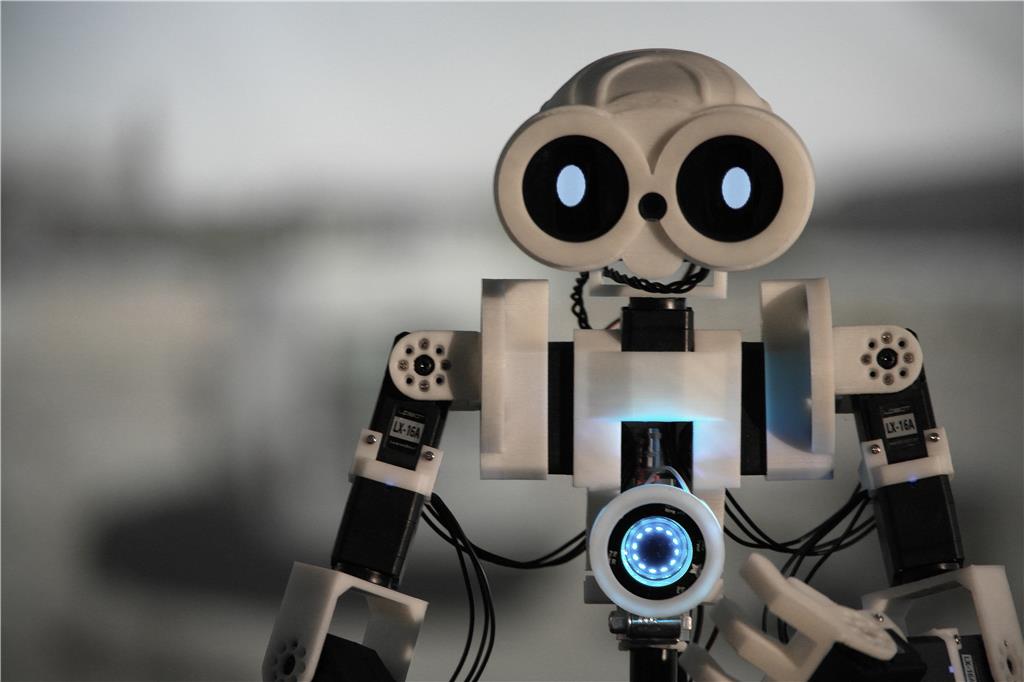
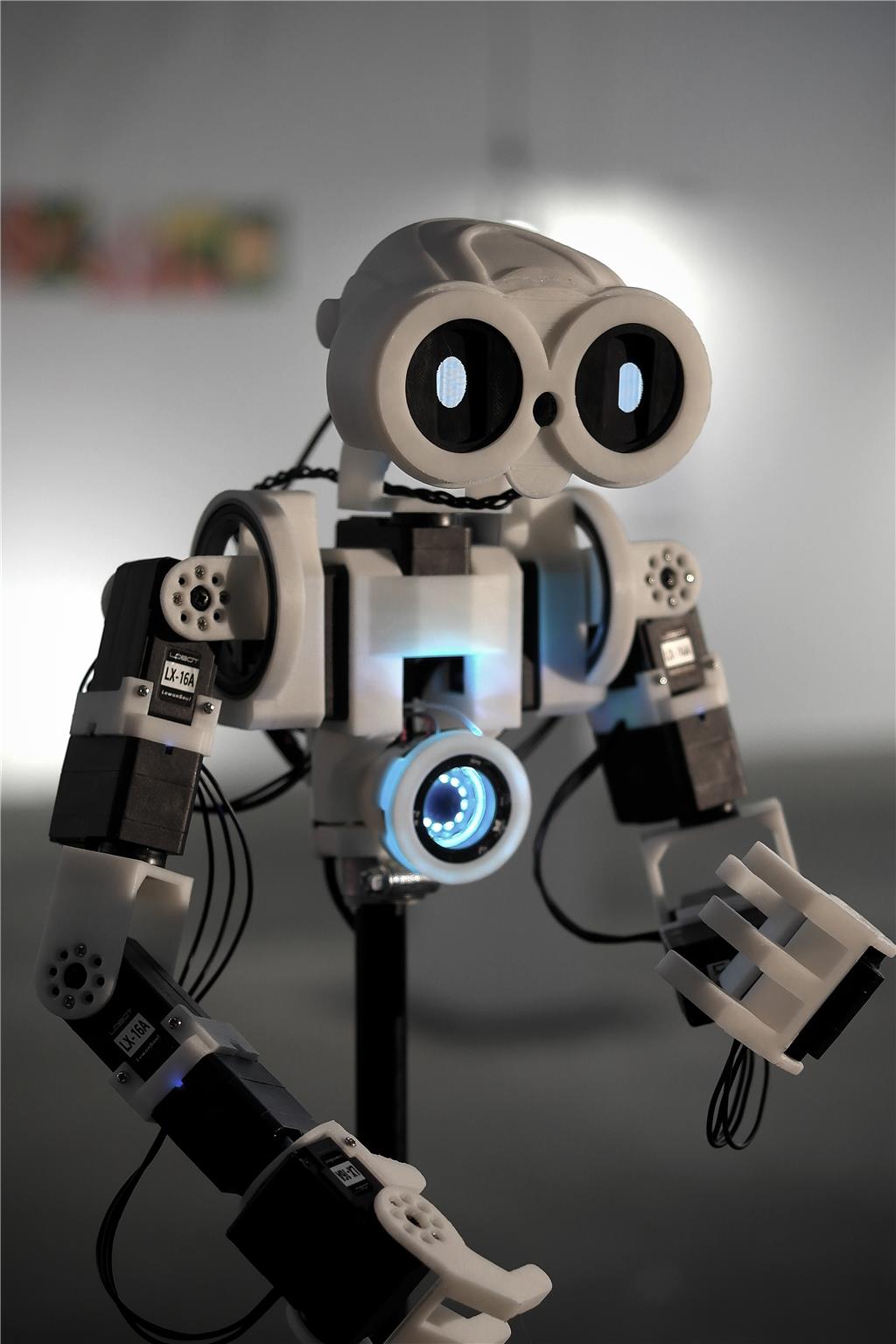
Finished most of the parts for the upper body, I mounted the robot on a tripod this time...rather than on a spool of filament, like I did previously!!
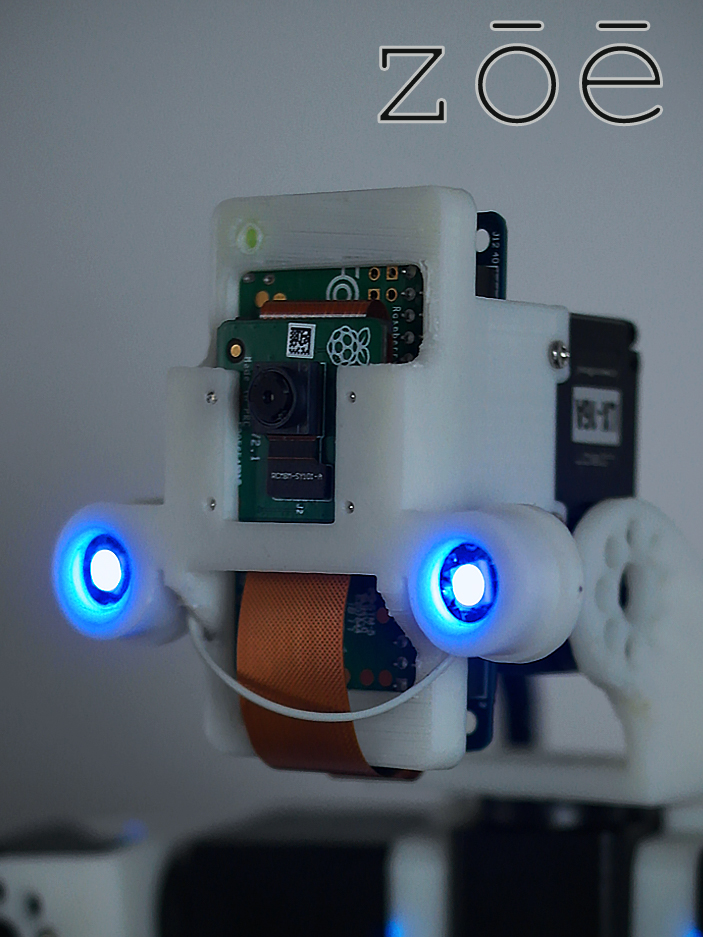
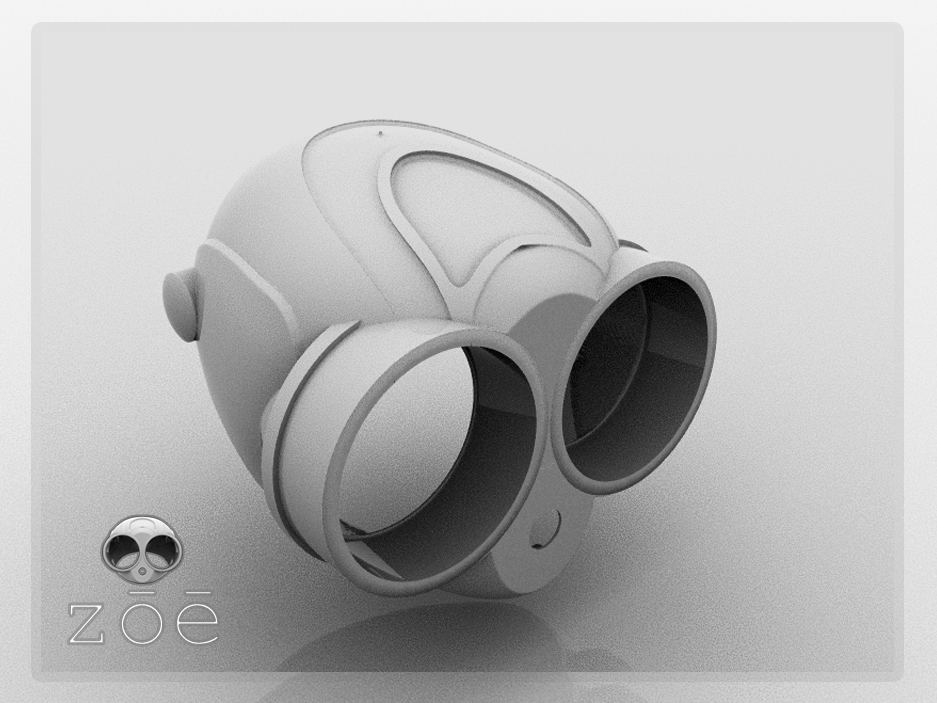
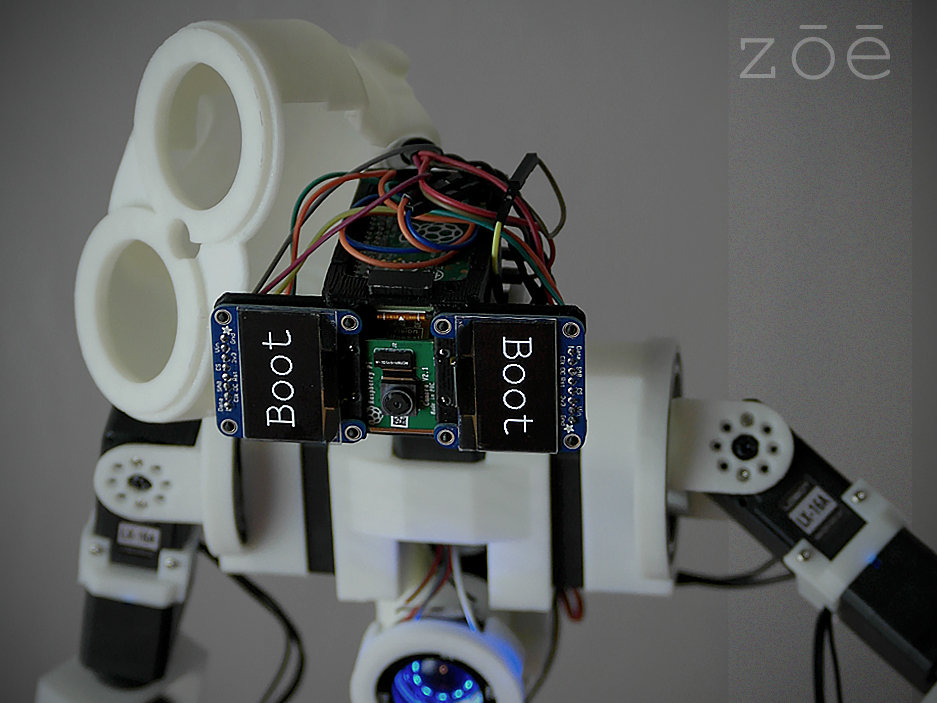
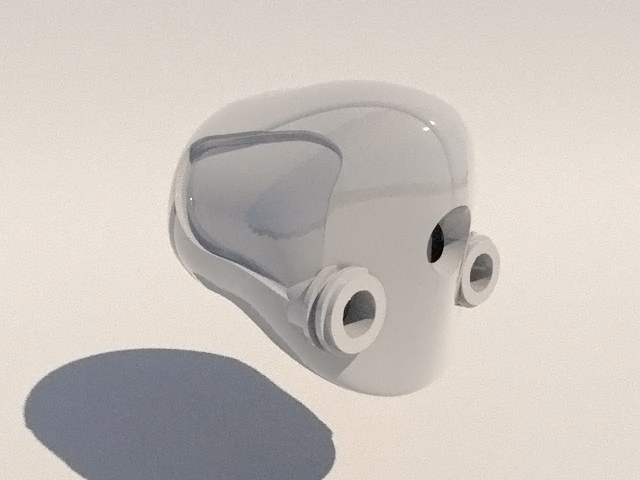
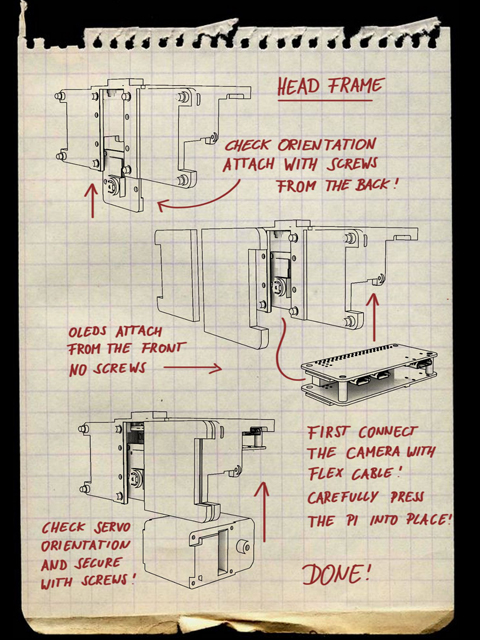
This setup seems to be a little unstable though, I might try to find a more sturdy tri pod...but I am happy how the cable management worked out!Next step is to remodel the head, to fit a Raspberry Pi Zero...that is what happens if you are rushing a conceptual design before gathering all the parts!!
That’s pretty wild looking. What is the base of the pole holding the body?