















Since my robot is running on a Raspberry Pi, which is now supported by ARC, I decided to evolve my current project K[8] into a new one called ZOE... First steps will creating a new servo setup which supports Dynamixel Servos, and a new Conceptual design!!
By Mickey666Maus
— Last update
Discover more robots

Rural's My Experiment 626
Scratch-built expandable robot platform for roaming guard, companion voice-controlled info, remote presence and...

DJ's Trs-80 Model 100 Controlled Wall-E
Control an EZ-Robot Wall-e from a hacked 1983 TRS-80 via TTL Bluetooth; load BASIC programs over Bluetooth; EZ-SDK...

Rb550f's Found An Old Freind
Experimental Omnibot hybrid (Omnibot 2000 + Emiglio/Scooter) with functioning remote control and motorized arm; includes...

Great news...looking forward to the update!! And with the Raspberry Pi 4 the ARC on Mono will be getting a huge leap in performance too!!
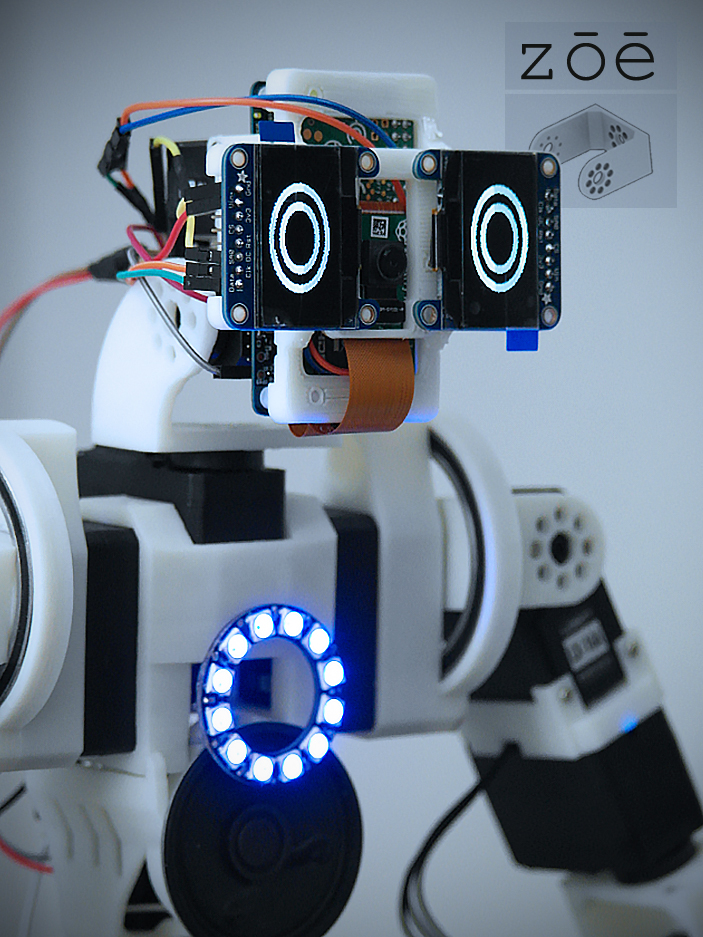
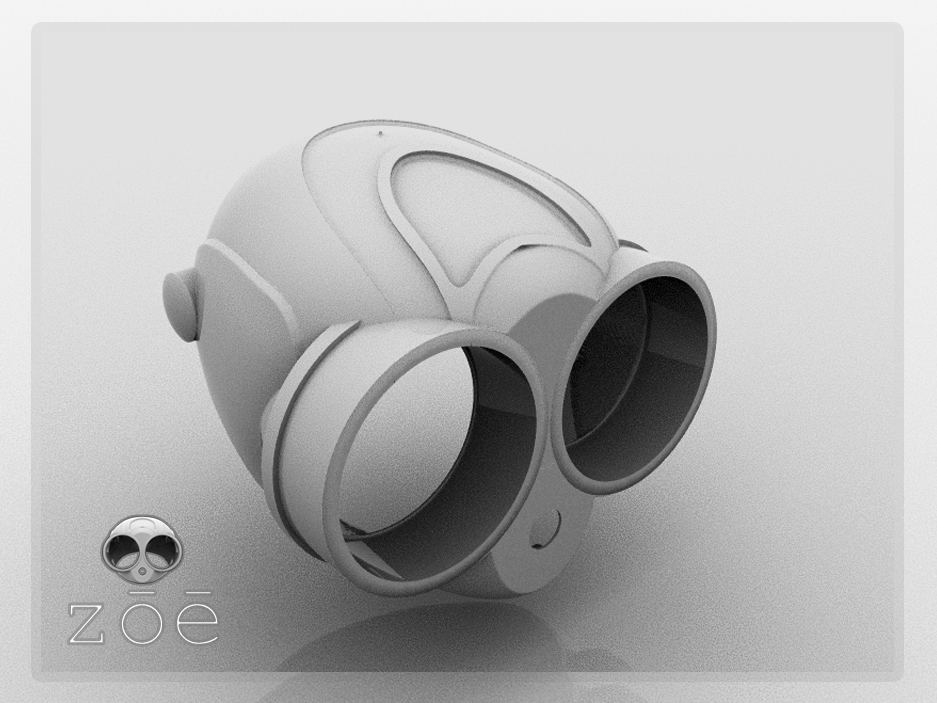
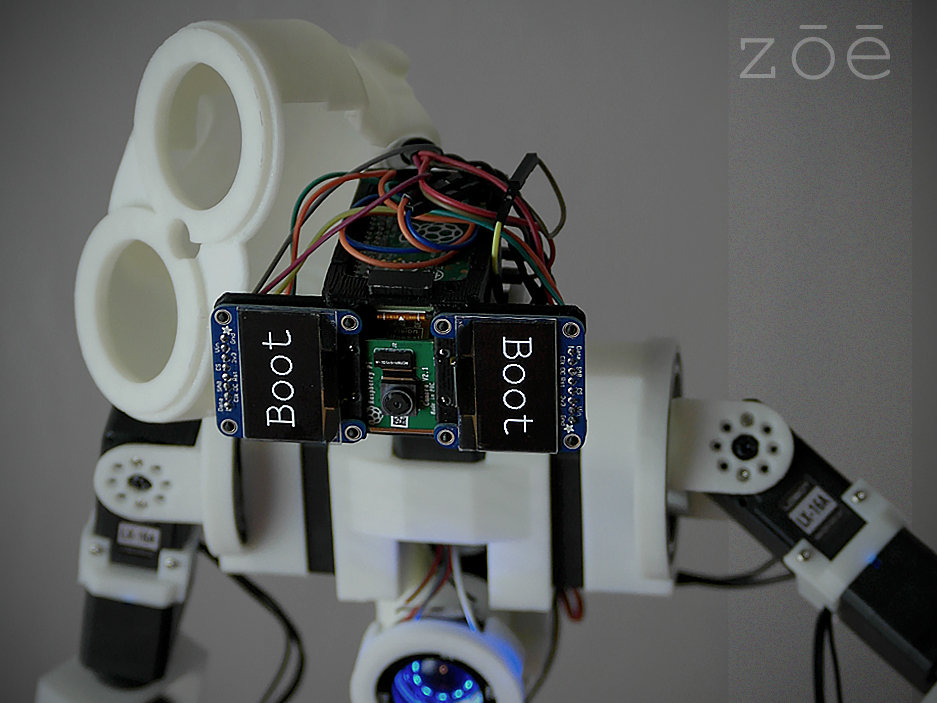
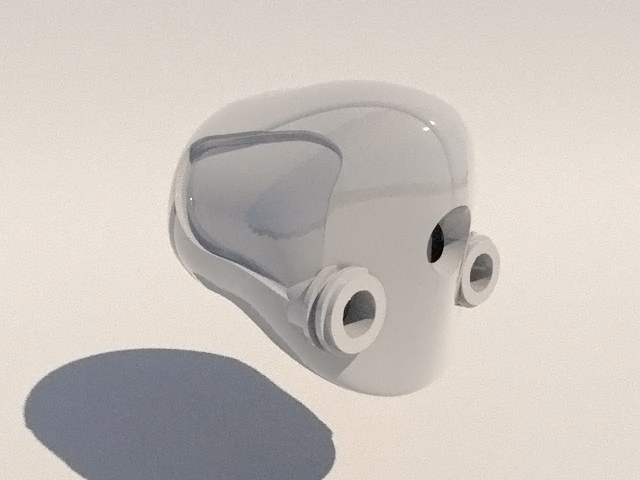
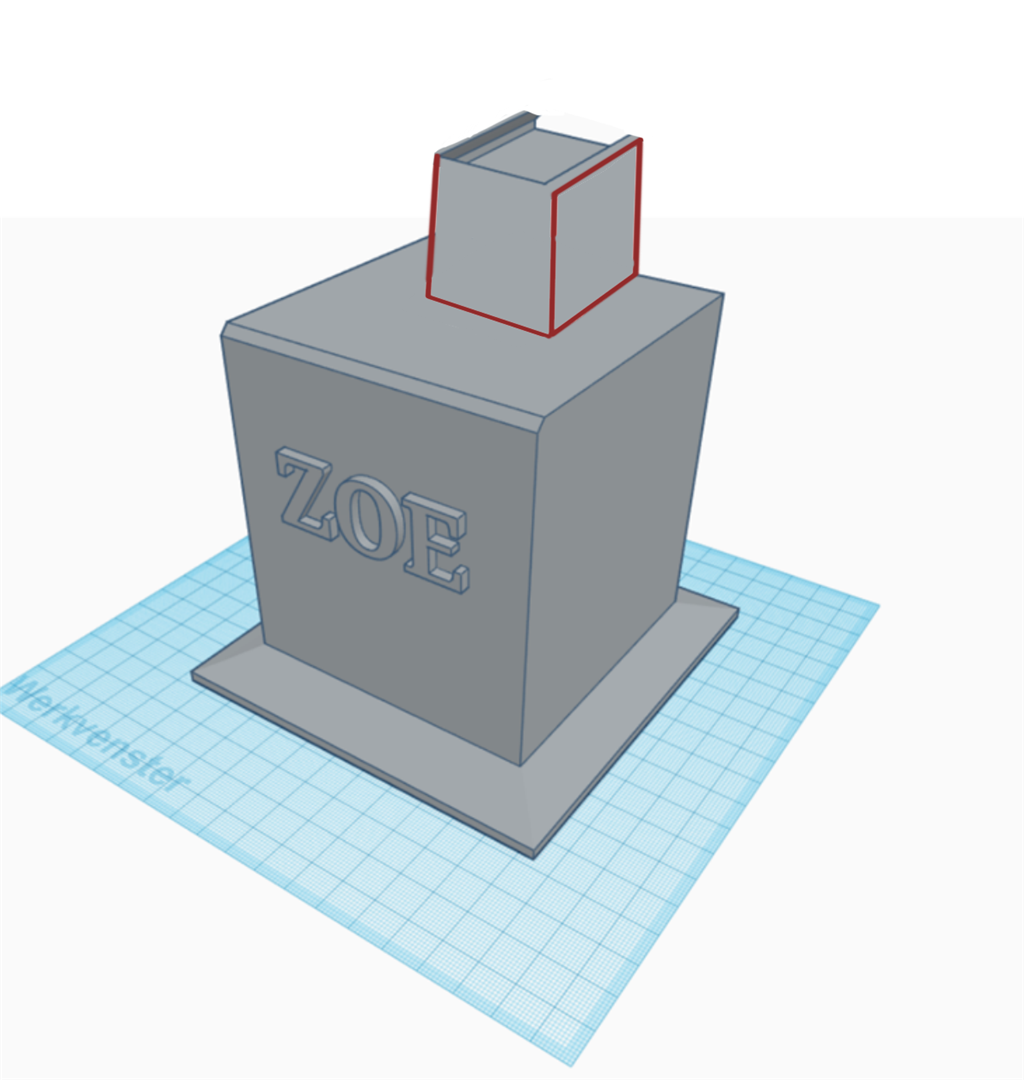
So I tried to come up with a new head design, which fits the oleds... I already printed it, but given how much effort I put in the first place to keep things compact and organized, the head is cartoonishly oversized!!
I might tweak it or give it another try...but for the fun of it I will assemble the print I guess, so you guys can see how it looks like!!
Actually I love the look of this head. I see no reason a robot cant have a part of his body that's over sized or oddly shaped. Remember Marvin the depressed robot from Hitchhiker's Guide To The Galaxy?
Thanks a lot for the feedback!! I am happy you like my design!! It was a bit difficult to keep it to proper dimensions, the oleds are shaped weirdly...
It was a bit difficult to keep it to proper dimensions, the oleds are shaped weirdly...
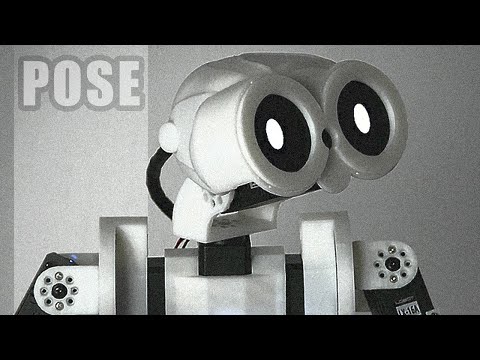
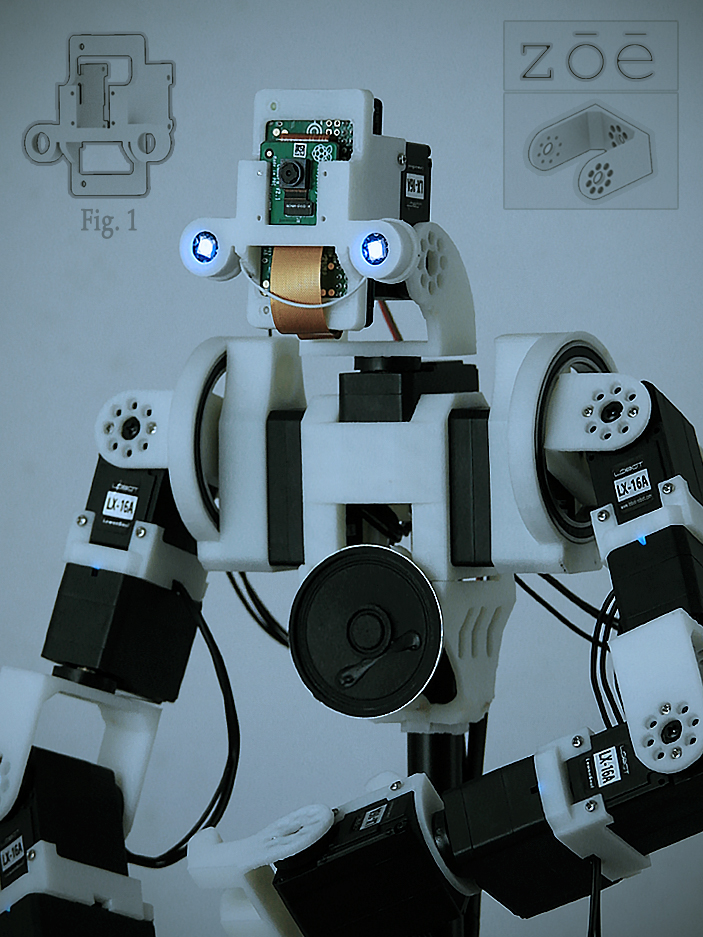
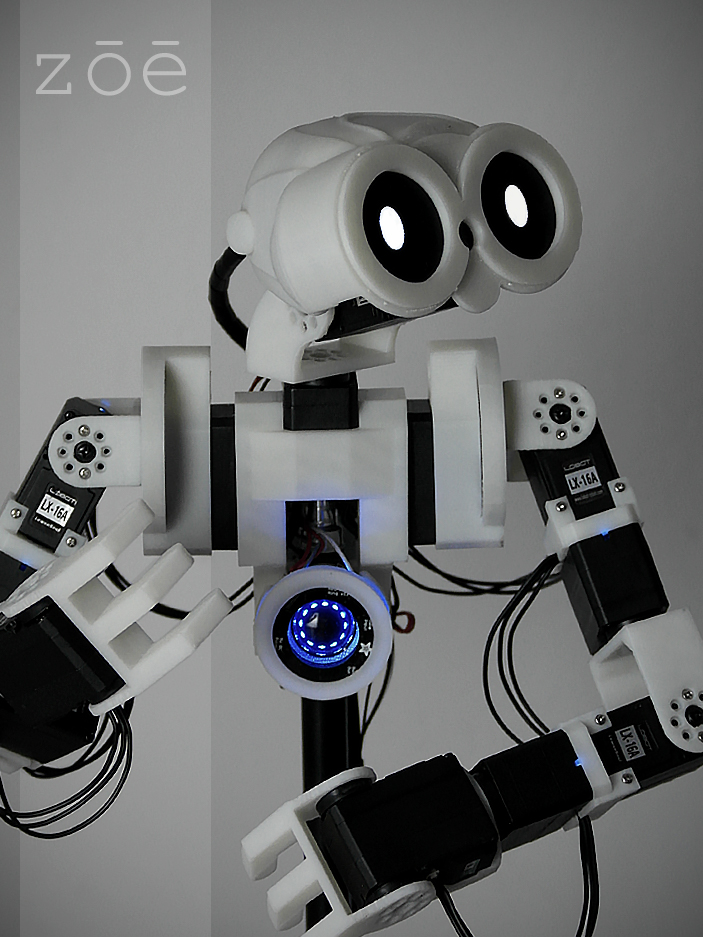
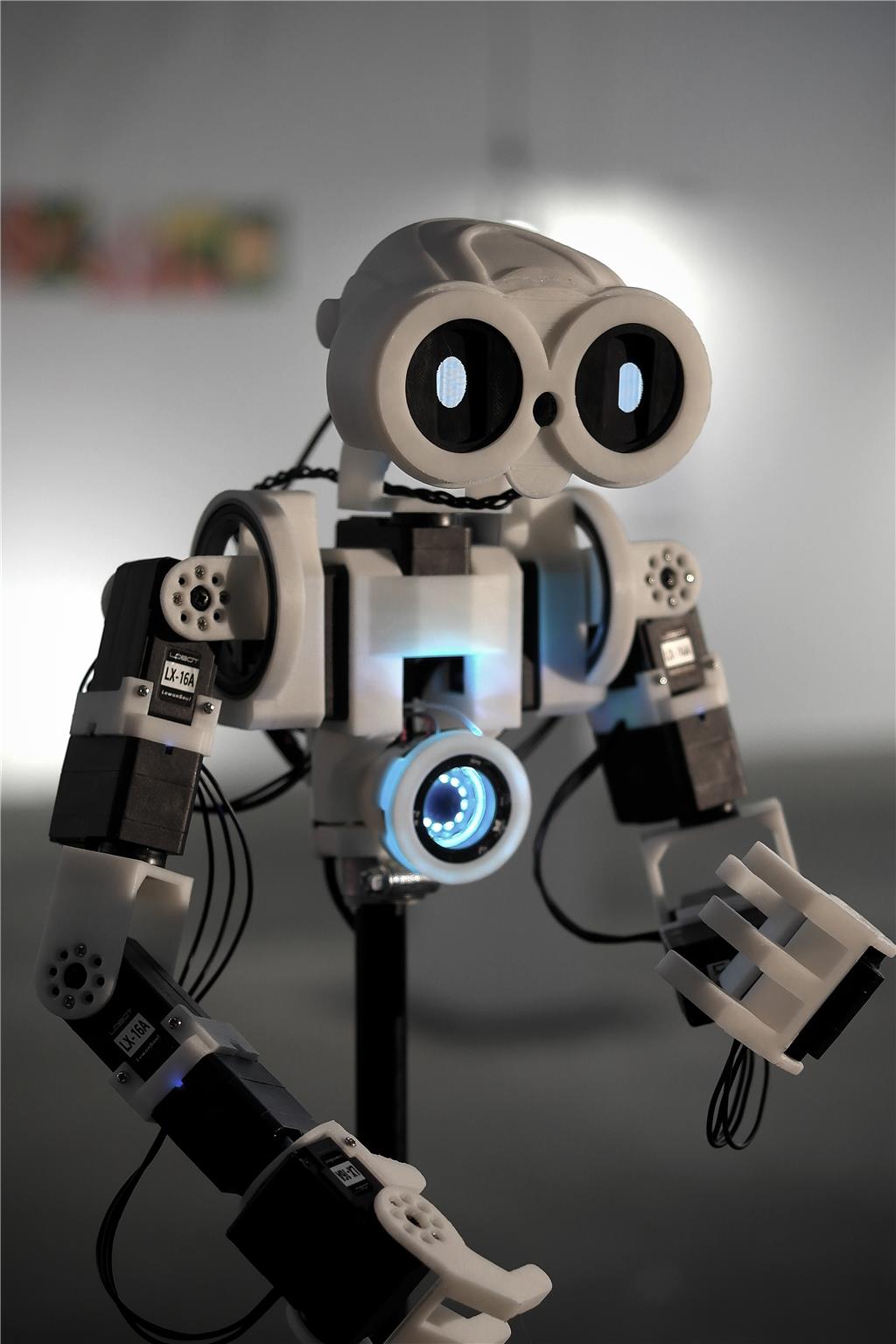
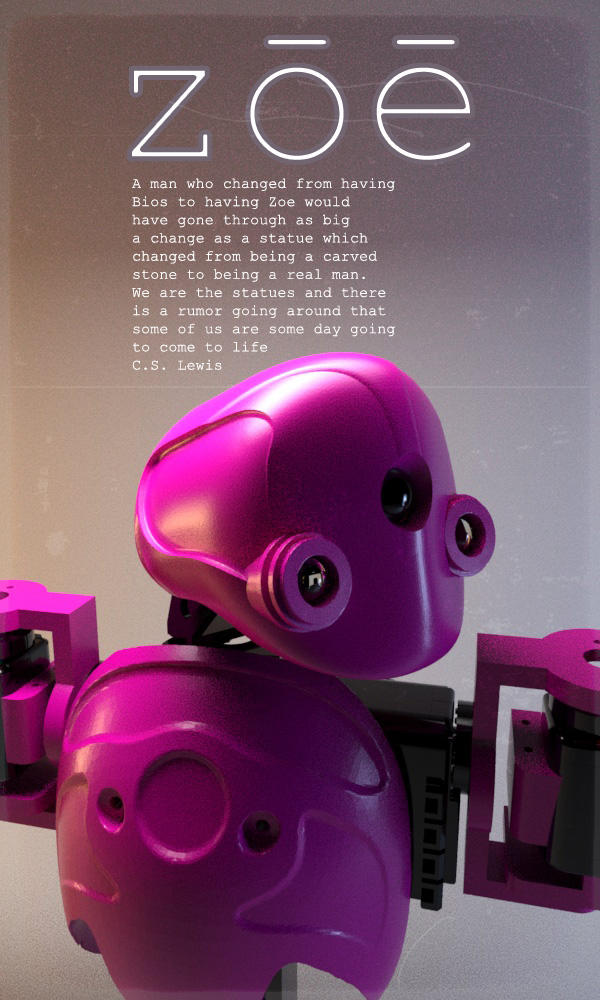
Now that Zoe looks a bit like an owl or a small monkey, I hope it will help adding some personality to a bunch of servos!!
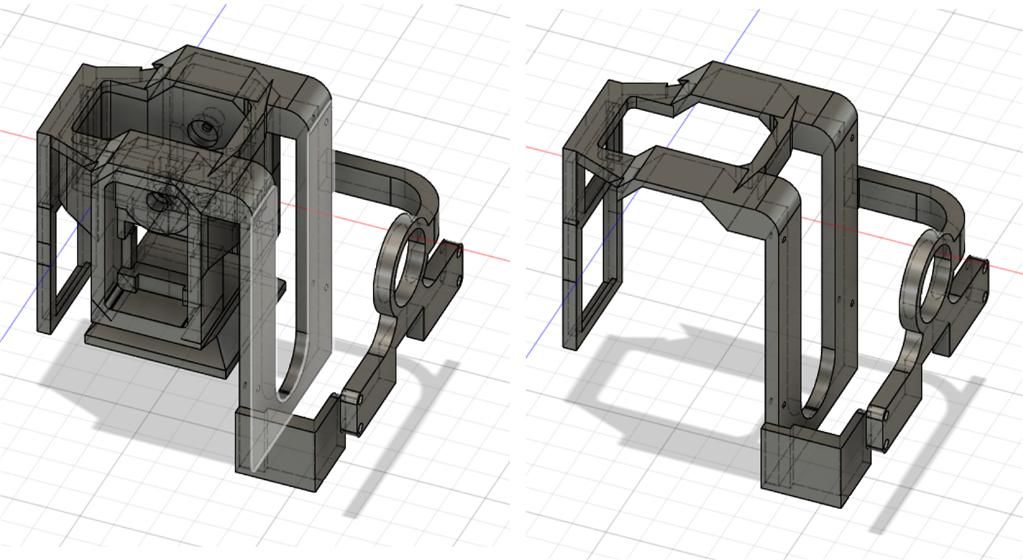
I will redesign the head a little bit to safe some space here and there, but keep the basics of my first iteration!
Marvin is GREAT!!! What a persona, right?
How's the new ezbpi server firmware working for you with the camera performance?
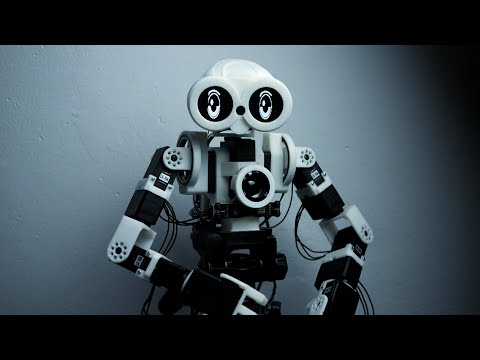
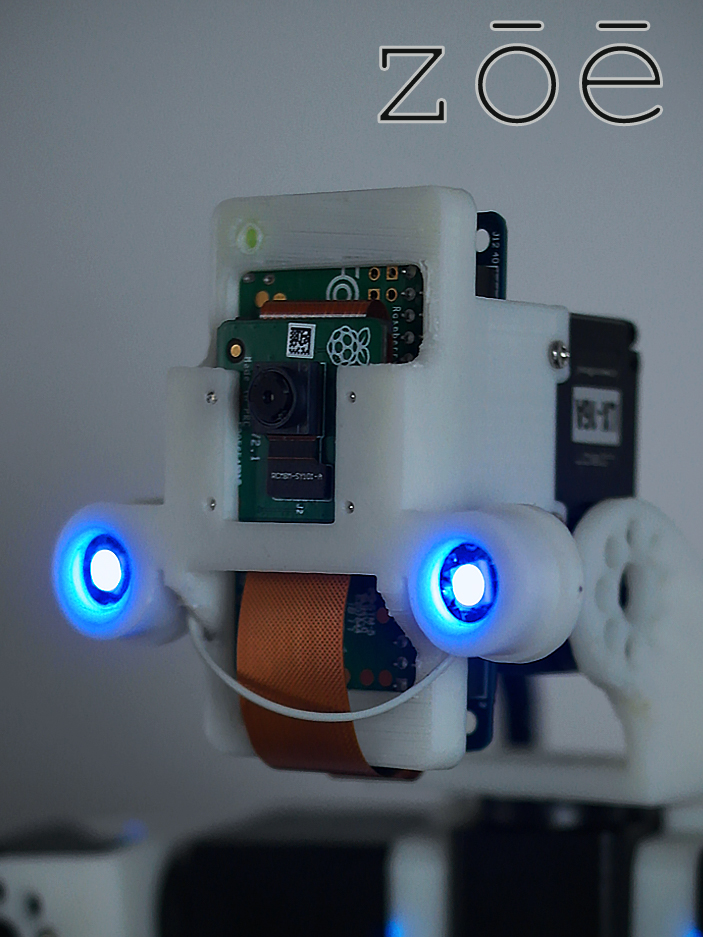
@DJSures I had a few things going on this weekend, so I was a bit delayed in testing the new firmware, but this morning I had the chance to do so!! I am very impressed by how smooth the camera stream runs even on my Raspberry Pi Zero which sits in ZOE's head!! This is great, once I assembled the new parts I will try and put together a demo to show the capabilities of the new EZBPi server!
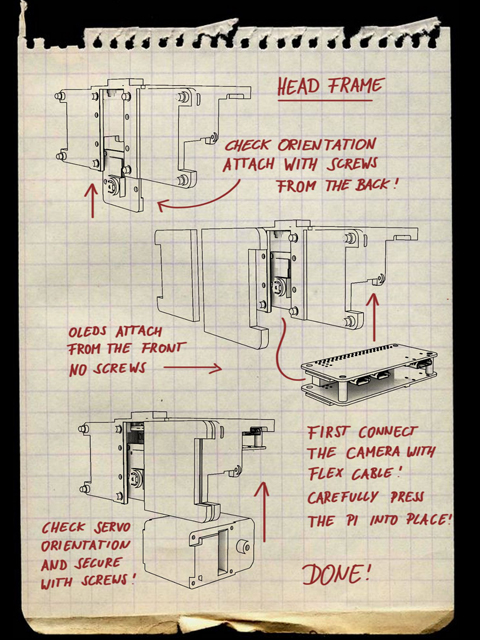
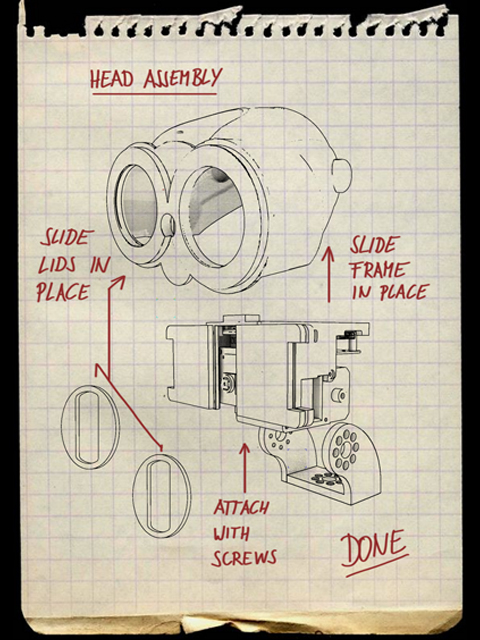
So there was a bit of delay building the head... I had a damaged boot partition on my Raspbian, which taught me another lesson of ALWAYS BACKUP!!! But eventually fsck saved me from a rainy day...
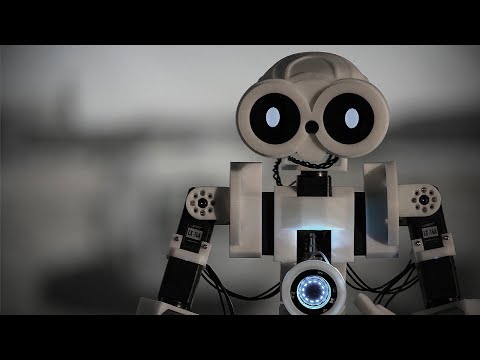
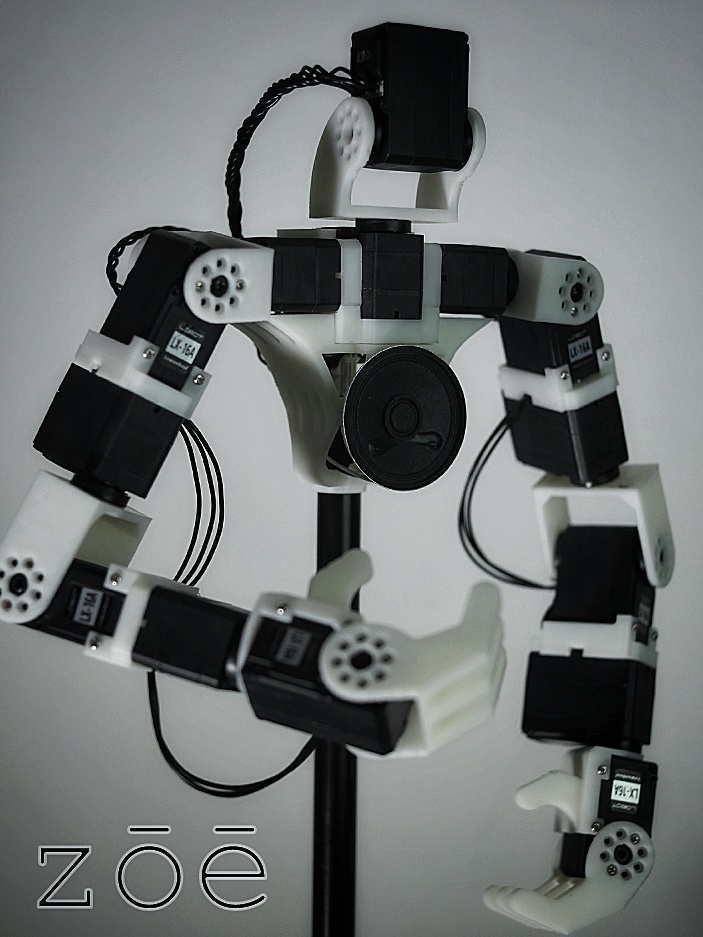
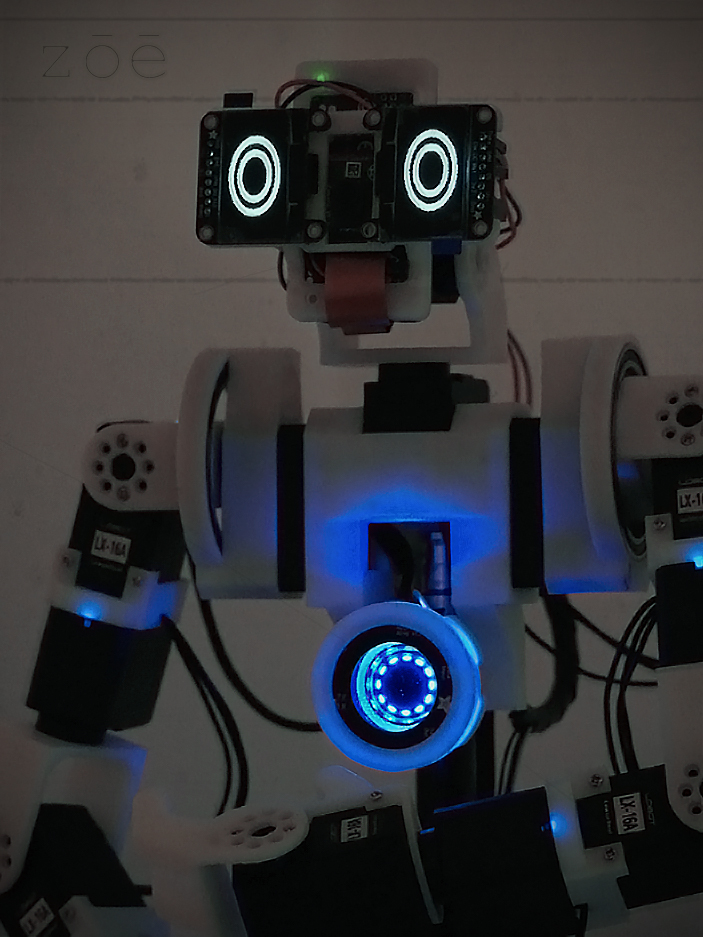
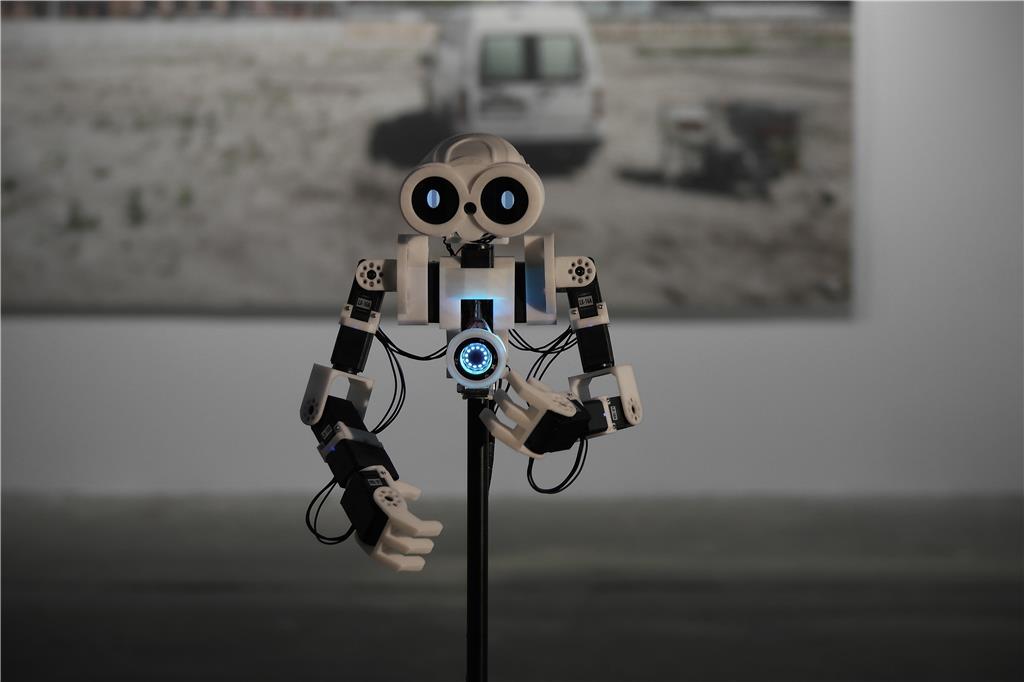
When I did some movement test I realized, 3d printed threads are no use when there is force applied... So I had to remodel the torso for better stability.
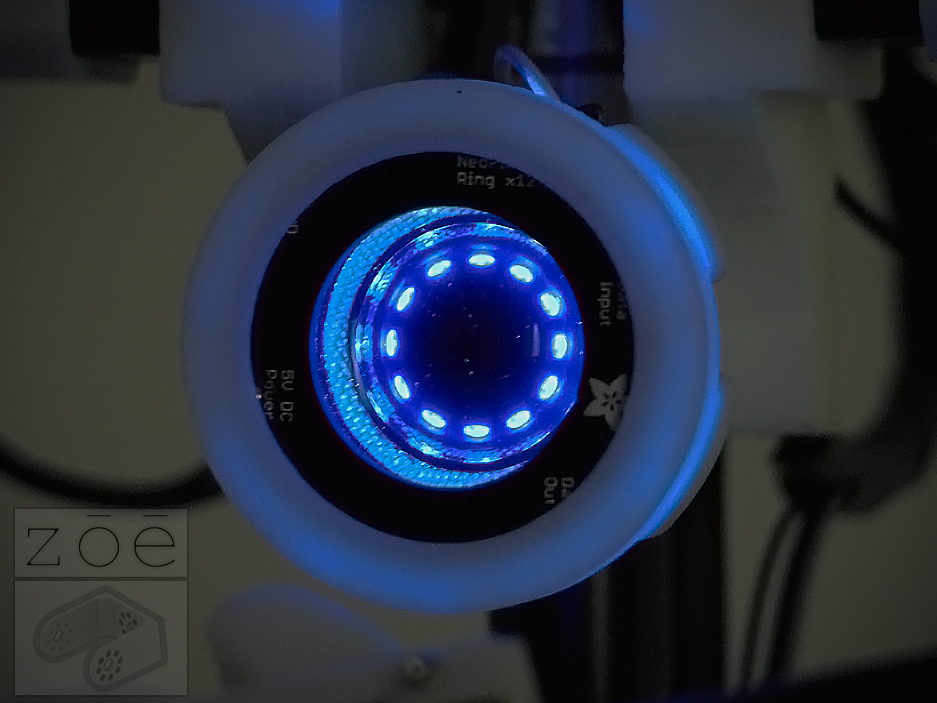
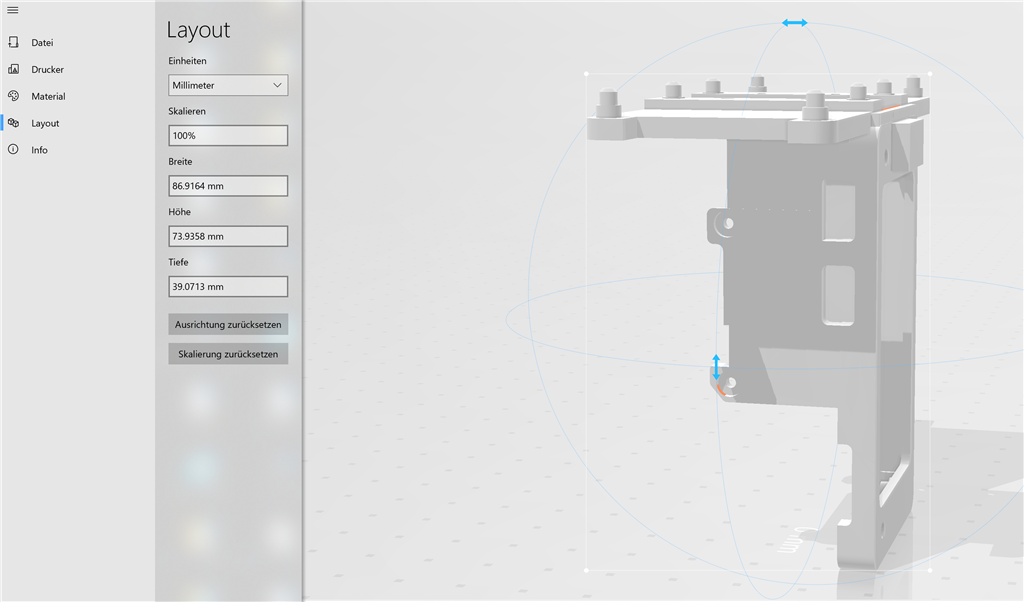
Also the new speaker and the NeoPixel needed to be attached to the body.
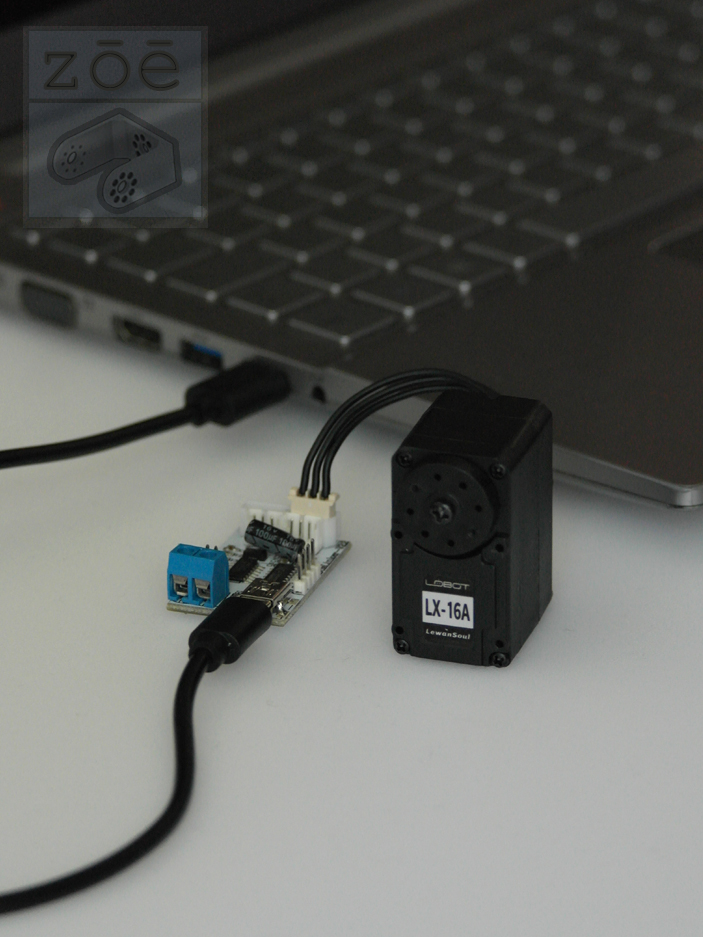
There is still a bit to go, but I hope I can soon print my new head and do some EZBPi server demo... The new improved camera performance and the LX16A being directly connected via COM is a great improvement for ZOE when running ARC!
I hope I can show some performance tests soon...
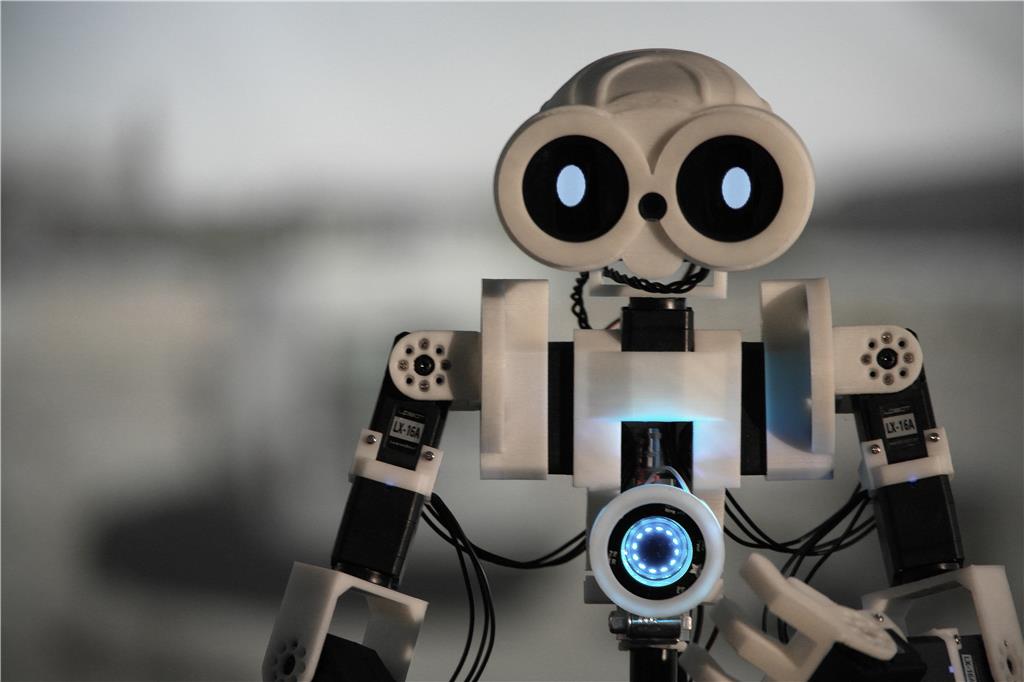
I am really mesmerized by the reflection of those NeoPixels on the speaker... I guess eventually I should use them for a head design, where they will be the robots eyes!!
Just something that crossed my mind for future projects...