









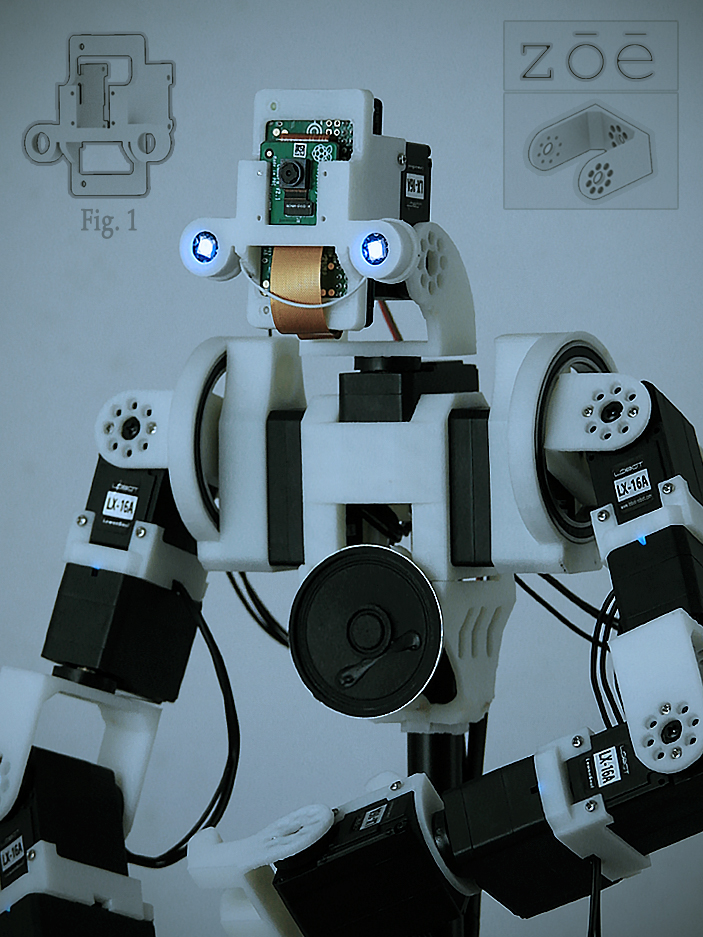
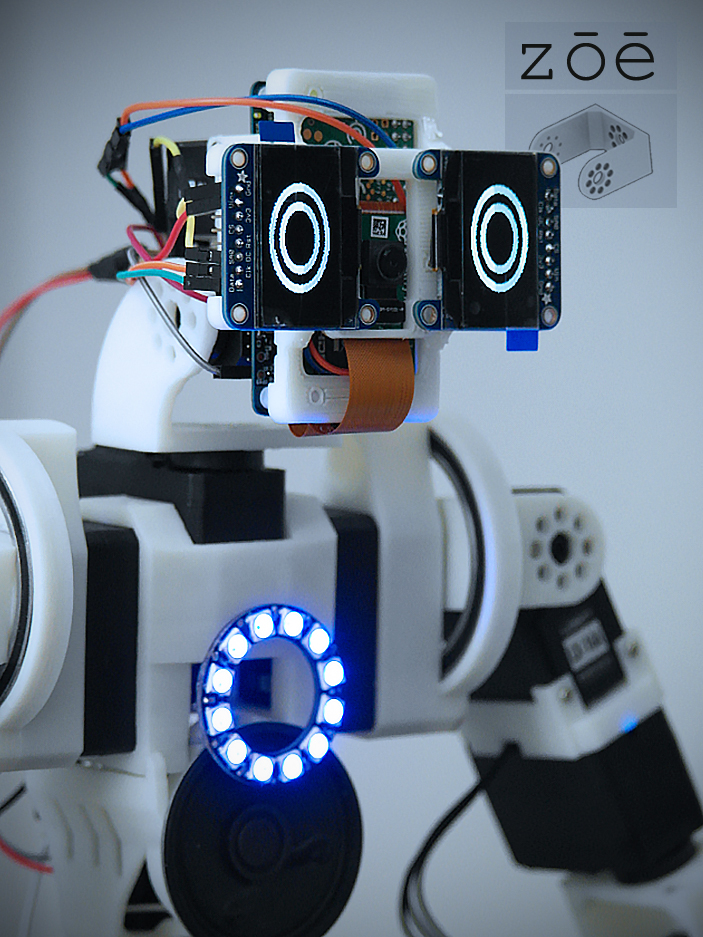
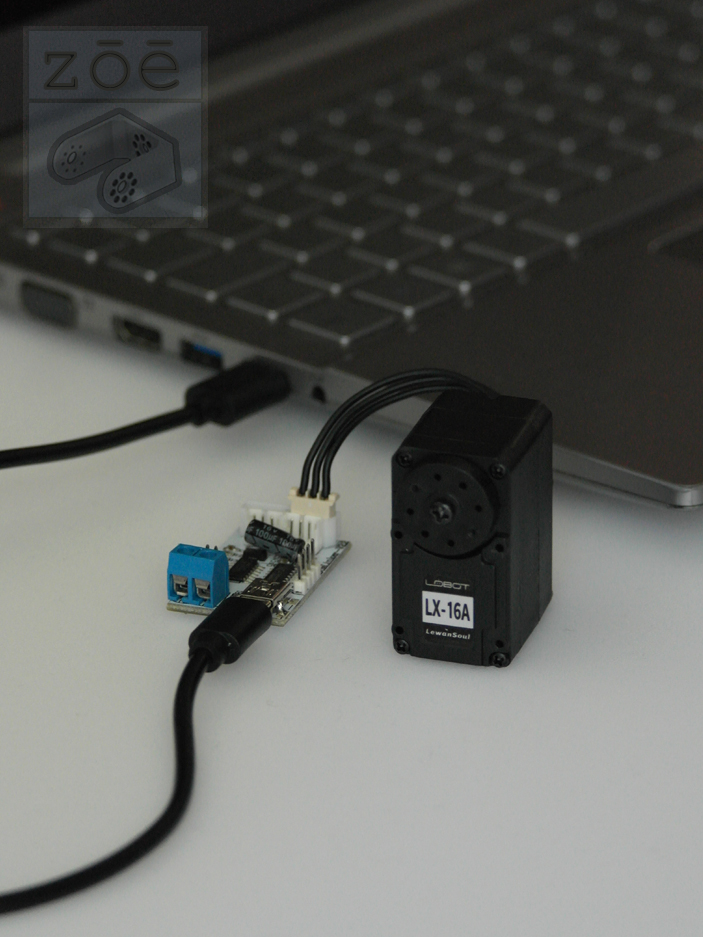



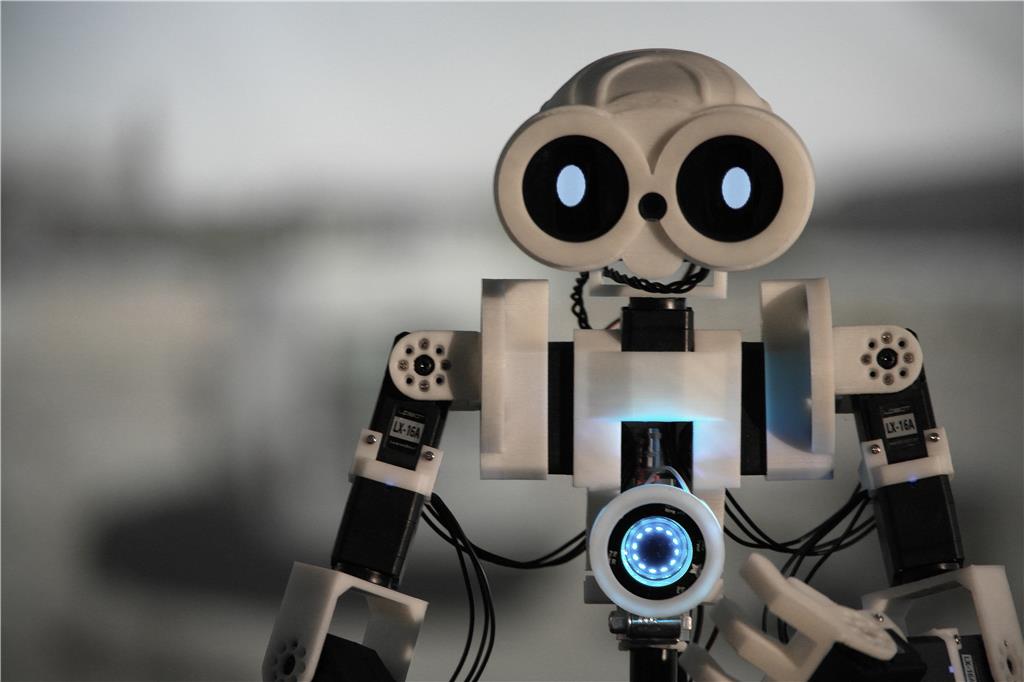


Since my robot is running on a Raspberry Pi, which is now supported by ARC, I decided to evolve my current project K[8] into a new one called ZOE... First steps will creating a new servo setup which supports Dynamixel Servos, and a new Conceptual design!!
By Mickey666Maus
— Last update
Discover more robots

Steve's Grace’S First Robot
Boxbot dance demo built with 9-year-old Grace, a family robotics project fostering her interest in building robots
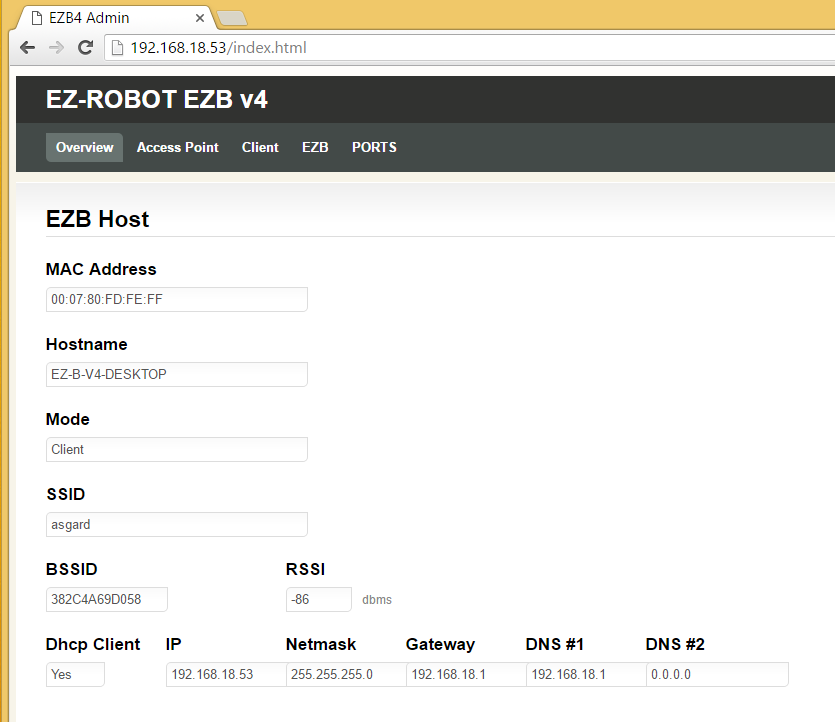
Ptp's Ezb V4 Custom Firmware V2
Custom EZB 4 firmware with AP, client/station, HOST/EZB and ports configuration; beta fixes, polished UI and developing...

Charleybot's Project Multi-Omnibots 2000
Upgrade Omnibot 2000s with Mini-ITX PCs, 12V battery power, servo-replaced arms, L298 motor controllers, USB Lifecam...

Cool! Looking forward to this!
Great looking robot will it have legs, or tracks or wheels?
I have been running thru some issues printing, because my new filament spools did not match to my filament holder... So I had to print a new holder, which was a nice little side project! While I was at it, I also setup OctoPi, which is a good tool that acts like Pronterface,
but also offers cool features like live webcam stream and timelapse features for various cameras!
While I was at it, I also setup OctoPi, which is a good tool that acts like Pronterface,
but also offers cool features like live webcam stream and timelapse features for various cameras!
https://octoprint.org/download/
I will this thread updated on my build progress...
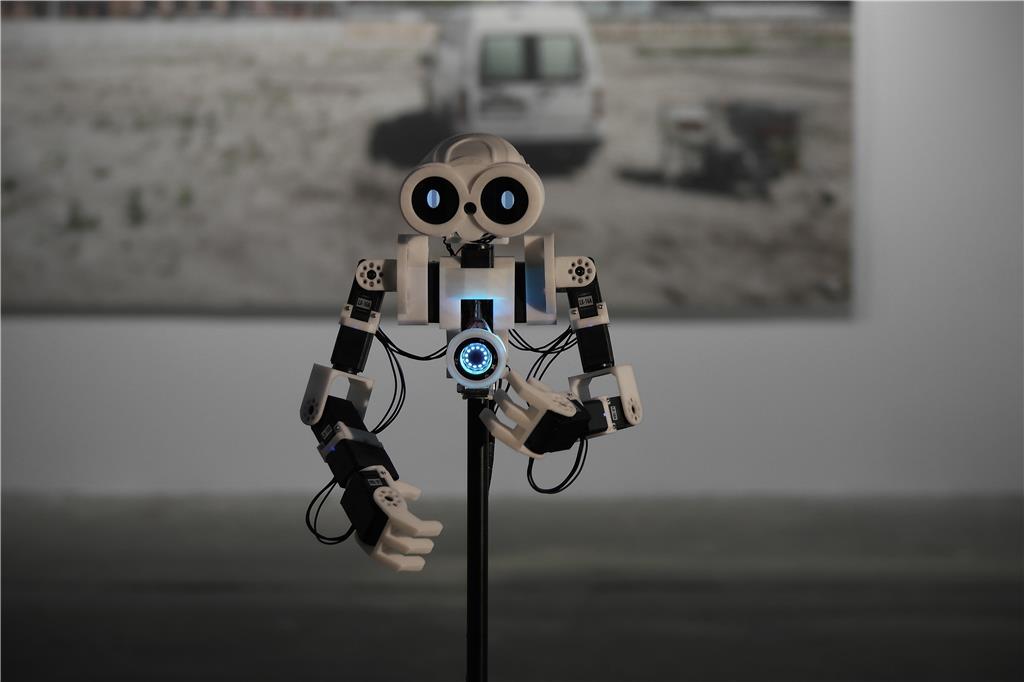
@nallycat My robot sits on top of a filament spool next to my monitor, its kind of desktop bound ... I was thinking to mount it on a tripod like you guys do it with your InMoovs, because where would it go anyways right? I might explore movement options at some point in the future out of curiosity though.
I might explore movement options at some point in the future out of curiosity though.
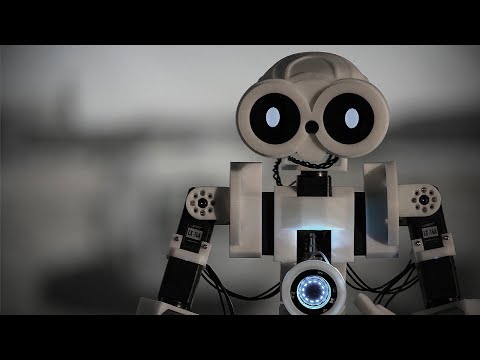
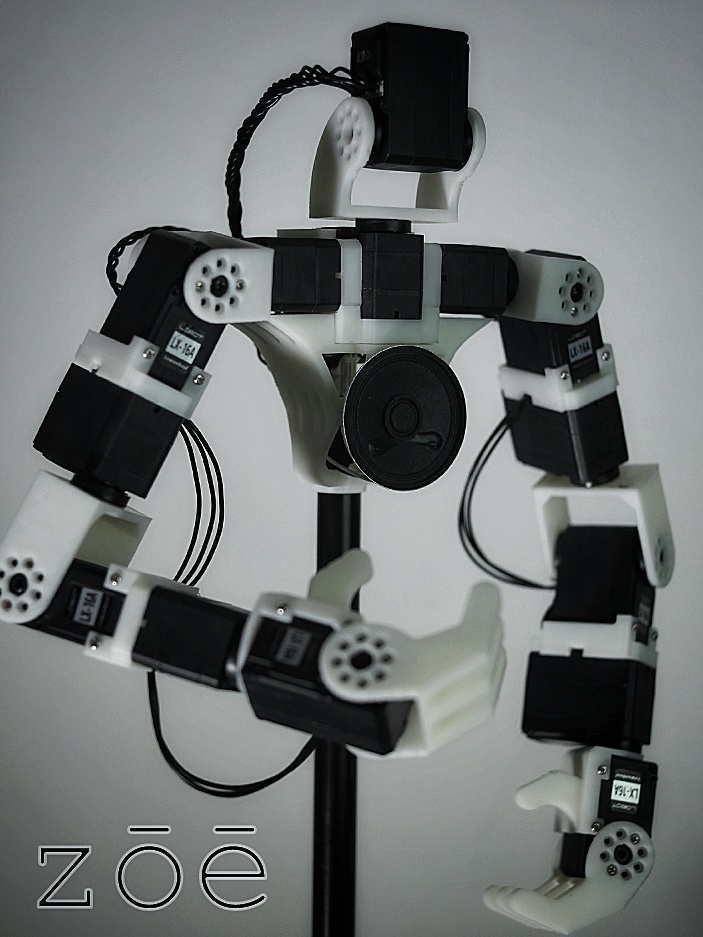
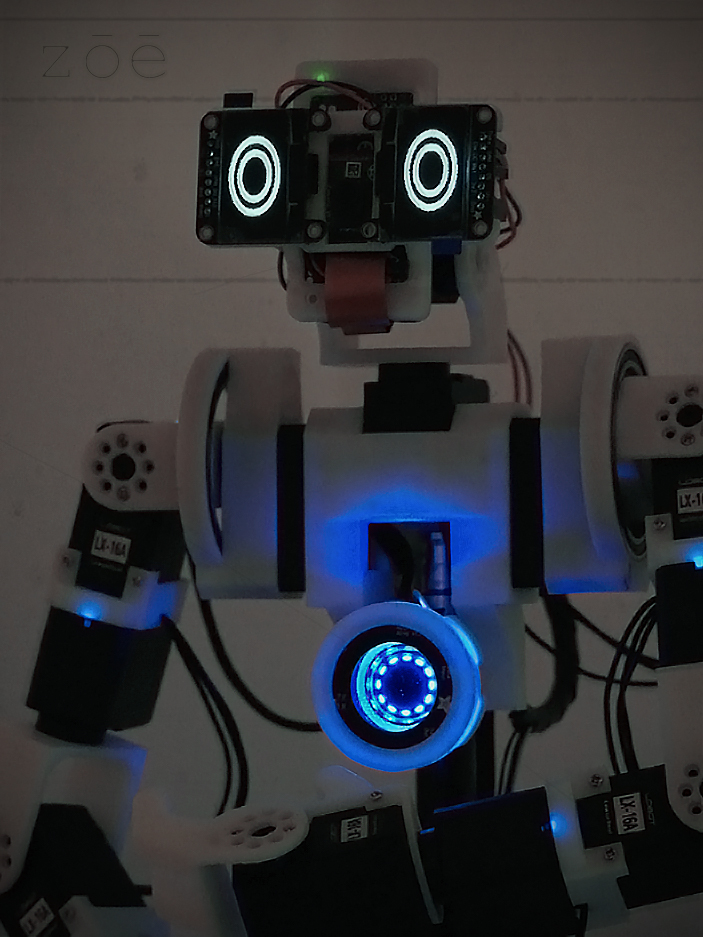
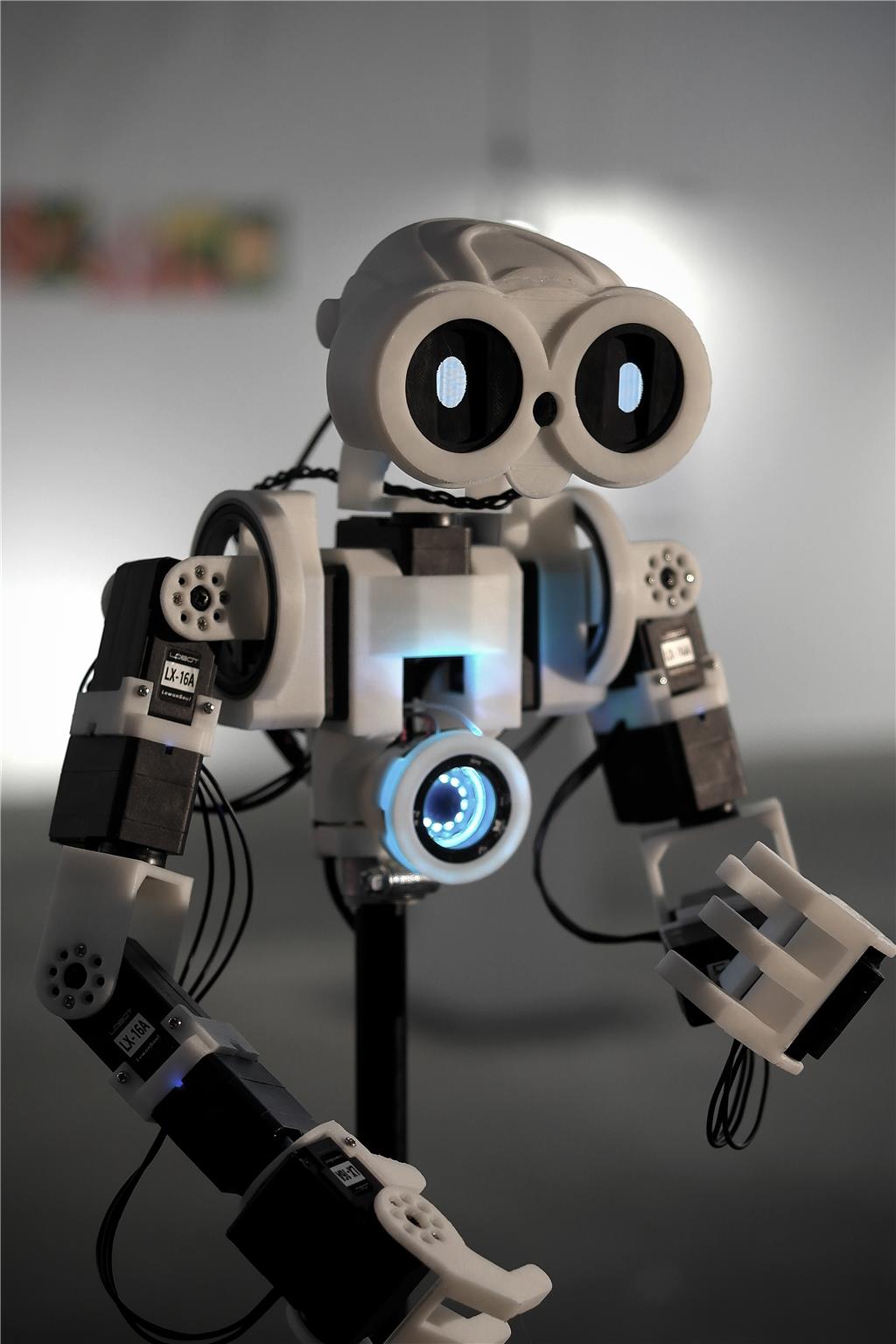
After sorting out some issues with my printer, I can go on to vapor smoothing and painting my prints...
Sweet! Looking great so far @Mickey666Maus!
Keep the pics coming, looking forward to seeing Zoe come to life!
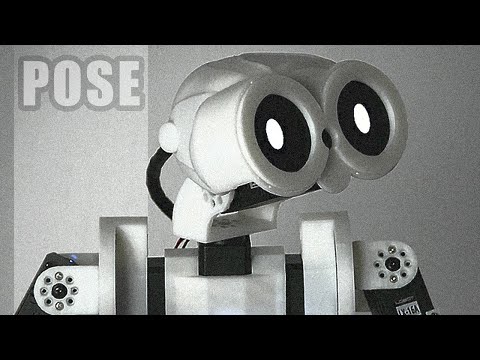
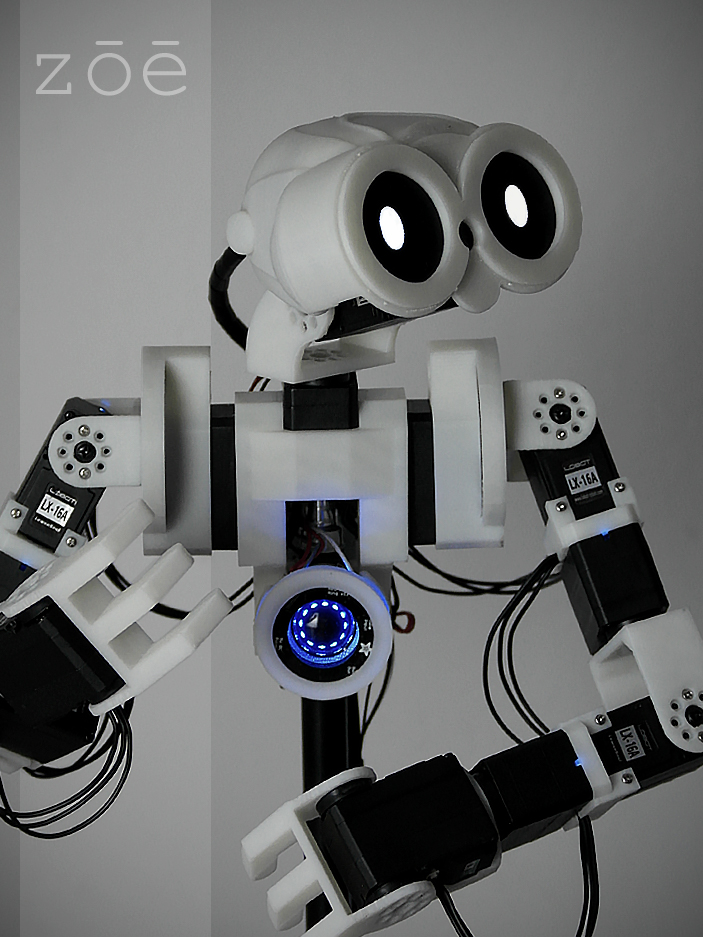
@Mickey666Maus Zoe is looking Good is this the second one, I like the Rose color on Zoe number one, wait that is the color of synthiam. what does Zoe have for arms and hands or grippers.
@Jeremie I will be away for two weeks starting Tuesday. When I am back I will continue to keep posting on this one!!!
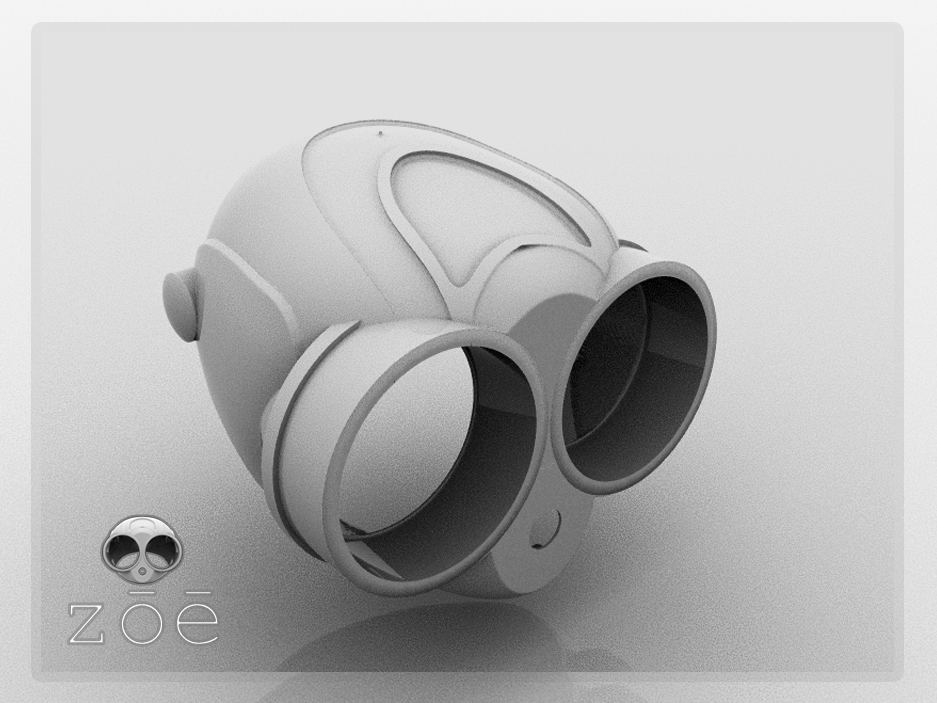
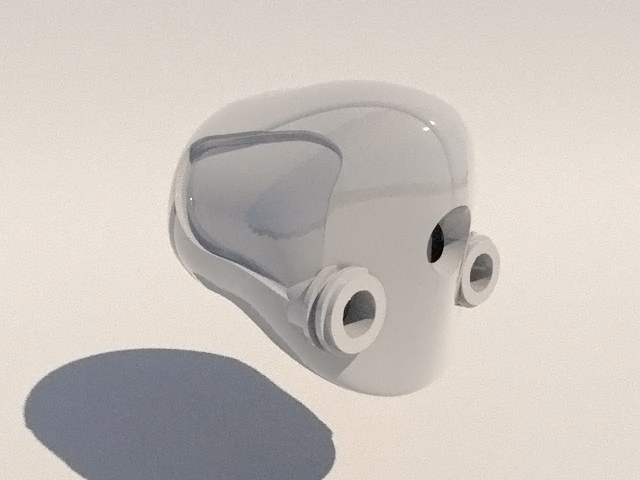
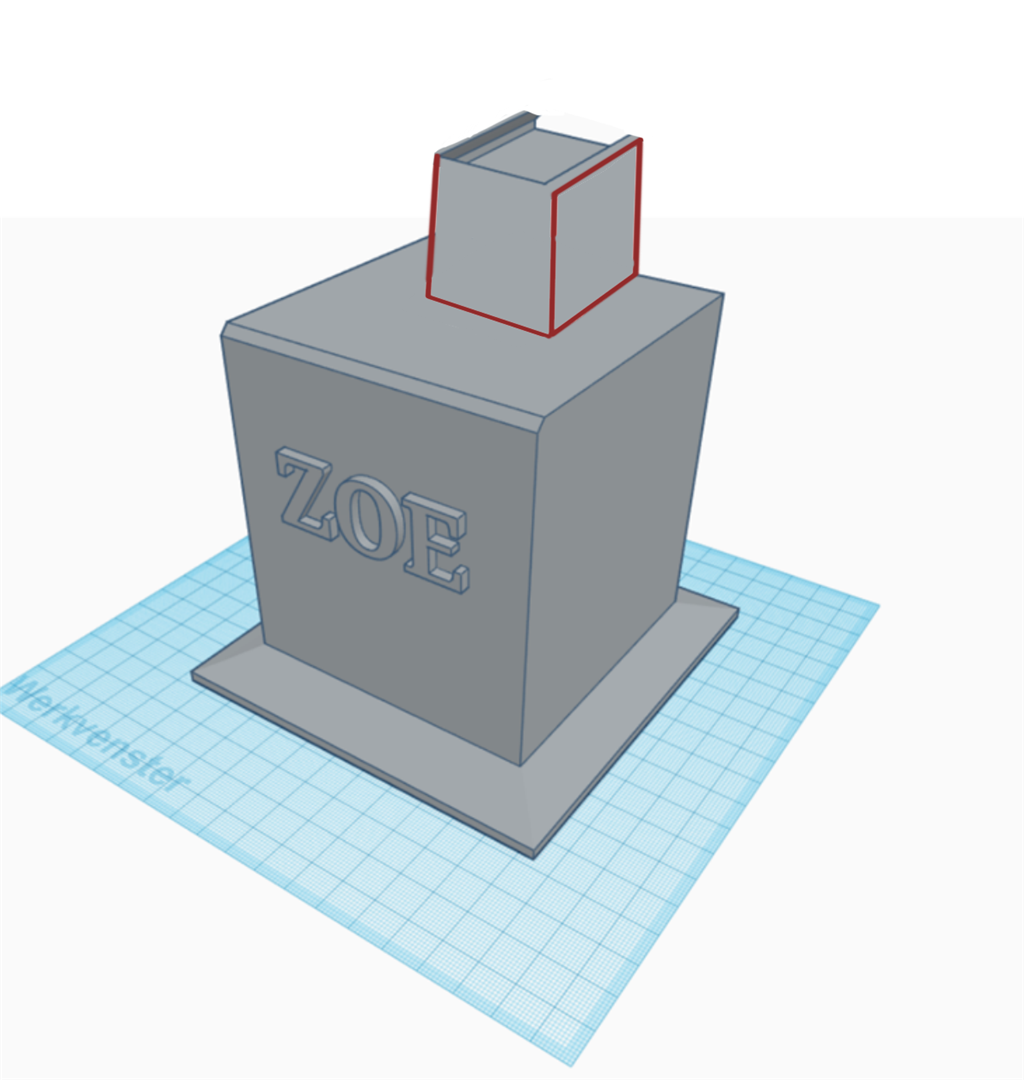
@nallycat The first picture was just a 3D image...only the idea of how I want the robot to look!! Now that I have printed the parts I can start building it!! I am happy you like the first picture better, because that is the way I want to go!! I will build Grippers that look like hands!! And will try to put Zoe together when I am back from my trip!!
I will build Grippers that look like hands!! And will try to put Zoe together when I am back from my trip!!