

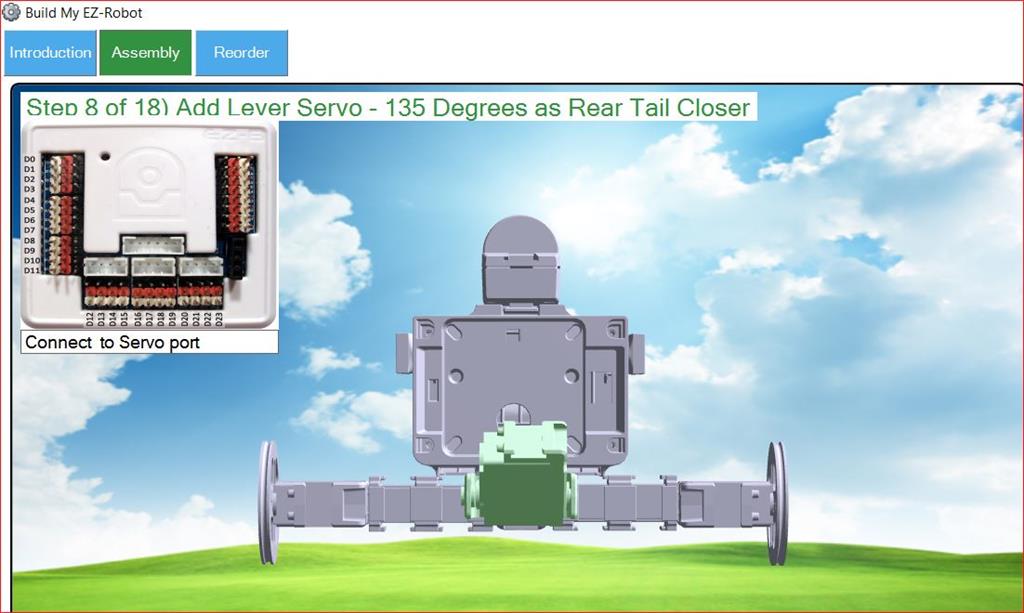
I don't see the actual port numbers defined in the instructions as they are for other projects.
I didn't see the ports listed under Project Details either
I need this info to execute the Auto Position Actions such as Kick
Thanks, Frank
By faengelm
— Last update
Discover more robots
Ezang's Richard The Robot For Exsophere 4/19/2020 Exciting...
Richard the robot for Exosphere sparks excitement for everyone involved.
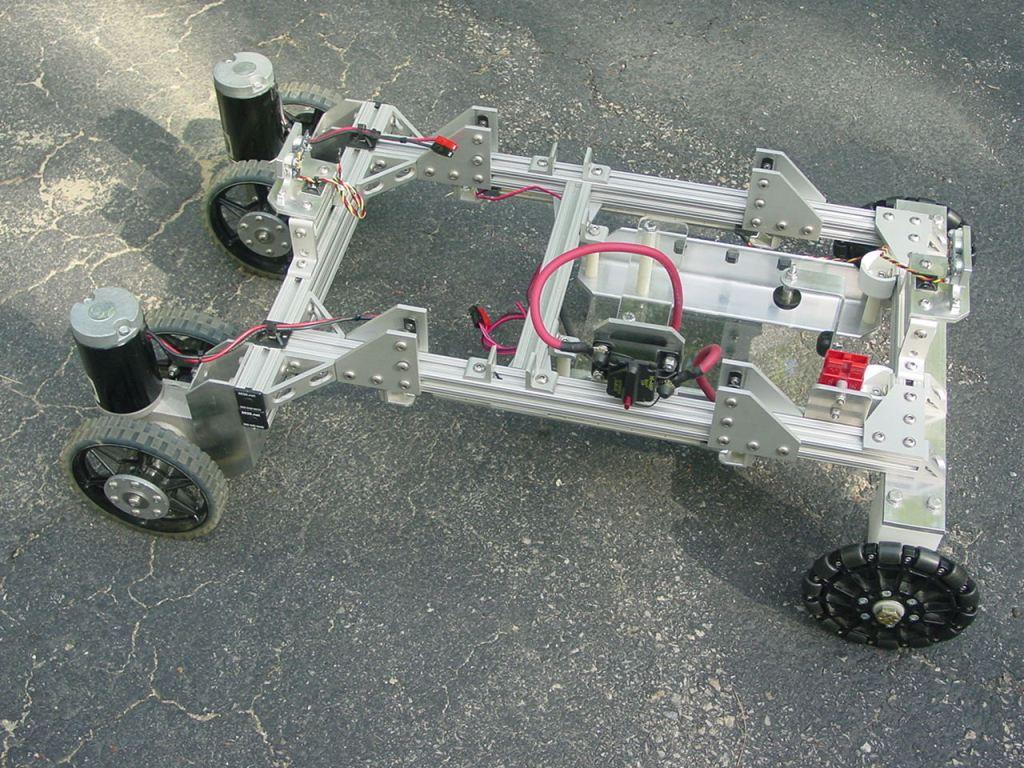
Jim's Project Armadeus
ARMadeus Mk7 articulated robot, 48" tall and 112 lb, modular 80/20 chassis with 12V gear motors, servos, linear...

Putt's Shorty
Custom EZ-B bot built on a Parallax BOE base with a LynxMotion torso and brackets; work-in-progress assembly

If you open the settings on the autoposition, click on the calibrate frame, and click the "live edit" checkbox, it will show you the port numbers except for the wheels. You can get the port numbers for the wheels from the Movement Panel settings.
Alan
@thetechguru
Hi Alan,
Thanks... that answers my question!
BTW, it looks like "live edit" has been renamed to "Port Edit Mode"
regards, Frank