

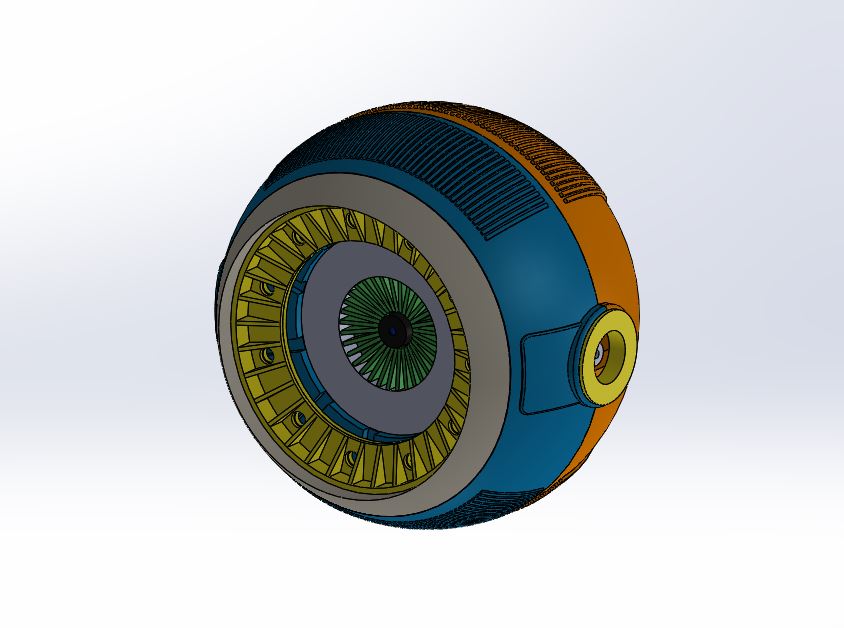
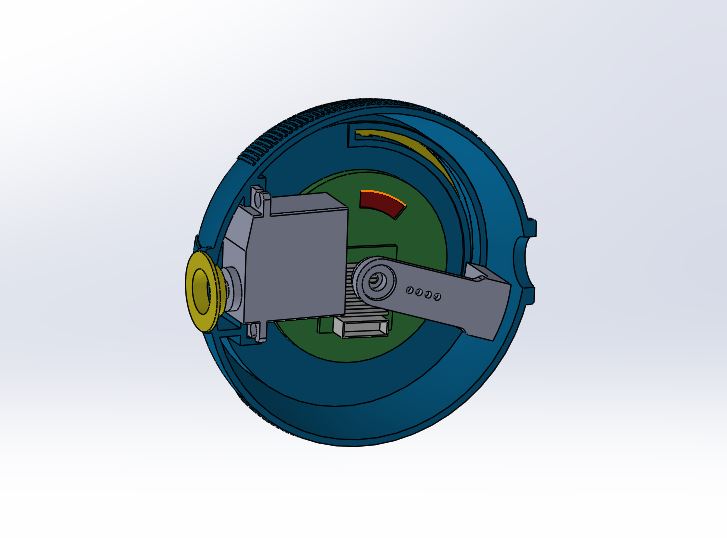
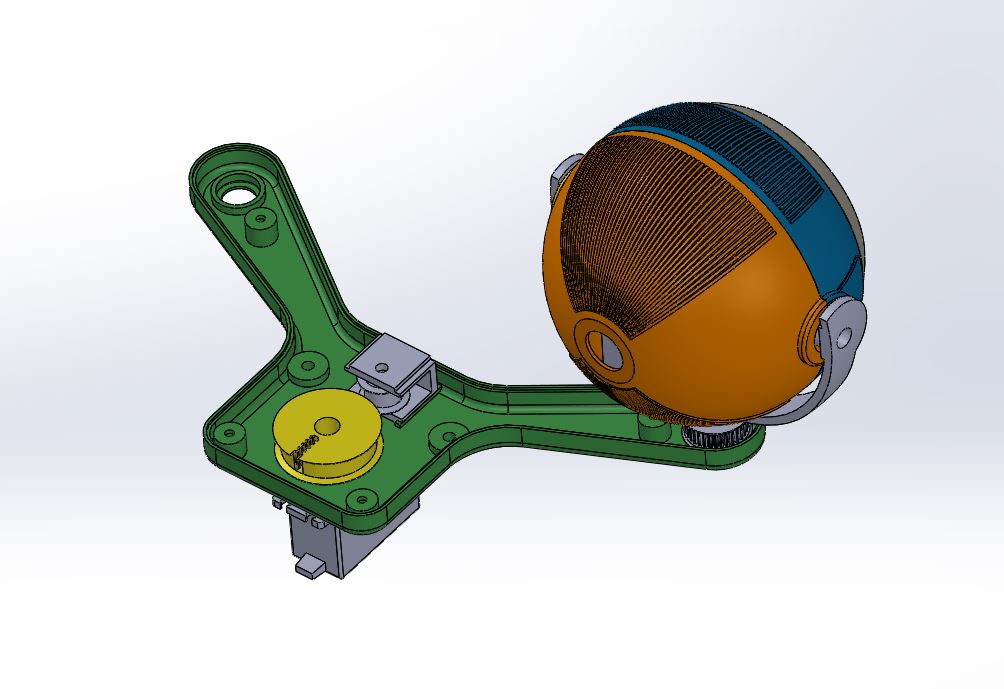
Hello, Now that I have moved on from my Inmoov I have been itching for a project. I would really like something unique and I have been enjoying the design aspect of it. Since I never properly named my Inmoov I am starting with a name. It is Scratch. Because I am sure it will get it's share of dings and scratches but also because I am starting this design from scratch. A singe eye is where I will start. I wanted a gimbled eye that looked kinda cool. It needs to move in the X and Y direction. I wanted it to have some form of interactive feature that could be used to help emote. So a blinkiing iris type of eyelid it will be. I also wanted a camera and a neopixel ring in the eye.
So here we go;
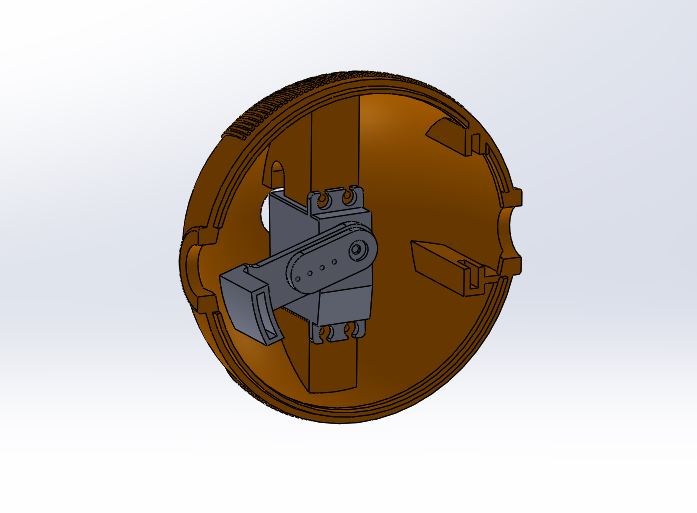
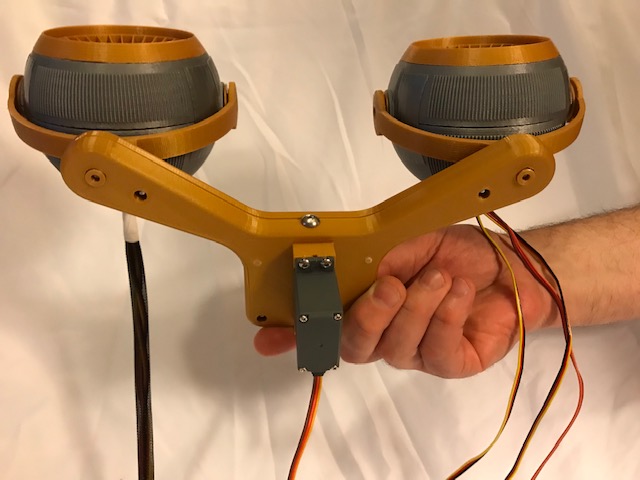
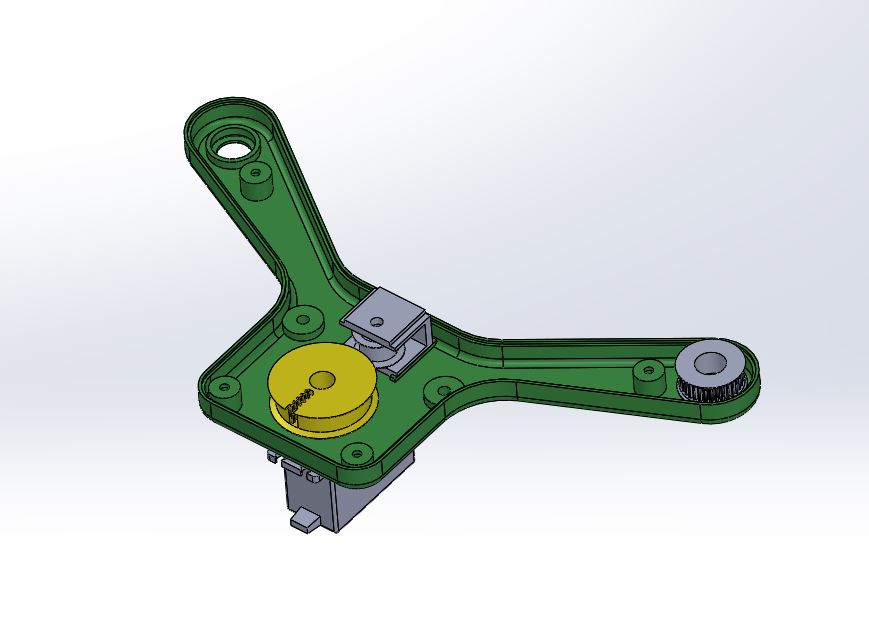
I needed a way to traverse the eyepod and I was considering two eyes for some configurations. So I designed this cross mount. It uses 3D printer belts and printed pulleys. I needed the whole assembly to move extremely smoothly and the linkage arrangements I tried were too jerky. This moves really smoothly.
I am not quite sure where this is going. I was thinking maybe a replacement head for inmoov for people that want something a little different. Maybe it will be part of a walking robot, who knows. I'll post some more information and videos before too long.
Discover more robots

Cardboardhacker's One Of The Hottest Video Games
Budel0's R.O.O.S.T.E.R.


Wow, looks great!
Your eye balls look great ! I did have a question for you, with the rotation of the eyes from right to left, are both servos connected to a Y harness and to one port on the EZ-B, or are they connected to two separate ports on the EZ-B ? They look really good for right and left rotation.
Hi rsmith, Each eye has it's own Y servo. THey are controlled from seperate ports. IT was the cleanest way I could fit the servos in there. The X motion is controlled by a single servo by the belts and pulleys.
@Perry_S What software are you using to design this? Fantastic quality!
I am using Solidworks. In the past I have used Pro/E, Inventor, and Solidworks. They are all pretty much the same with different mouse clicks. All parametric modelers.
That Iris shutter is so cool! Now I want to build one myself! Never crossed my mind! They are actually pretty big, they could probably just be the head of a small sized, one eyed robot...like the one I am building!
They are actually pretty big, they could probably just be the head of a small sized, one eyed robot...like the one I am building!
@Mickey666Maus Thanks. I am seeing a lot of cool uses for the eye. The front page on Thingiverse shows a big hex walker. A Single eye would look awesome on that. There is room inside for a battery and IOtiny so technically you could just carry around a single interactive web connected eye.
I'll put the design up on Thingiverse before too long. Need to clean up a few details.
@Perry_S: Cool design... Reminds me the Johnny Five eyes (without the lights)