



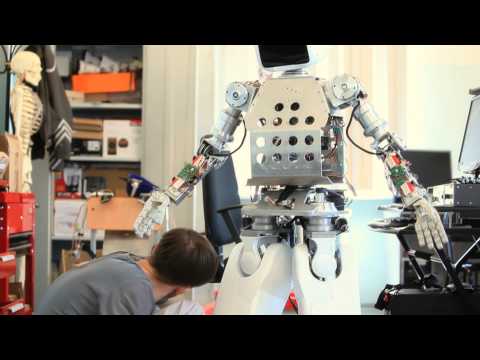











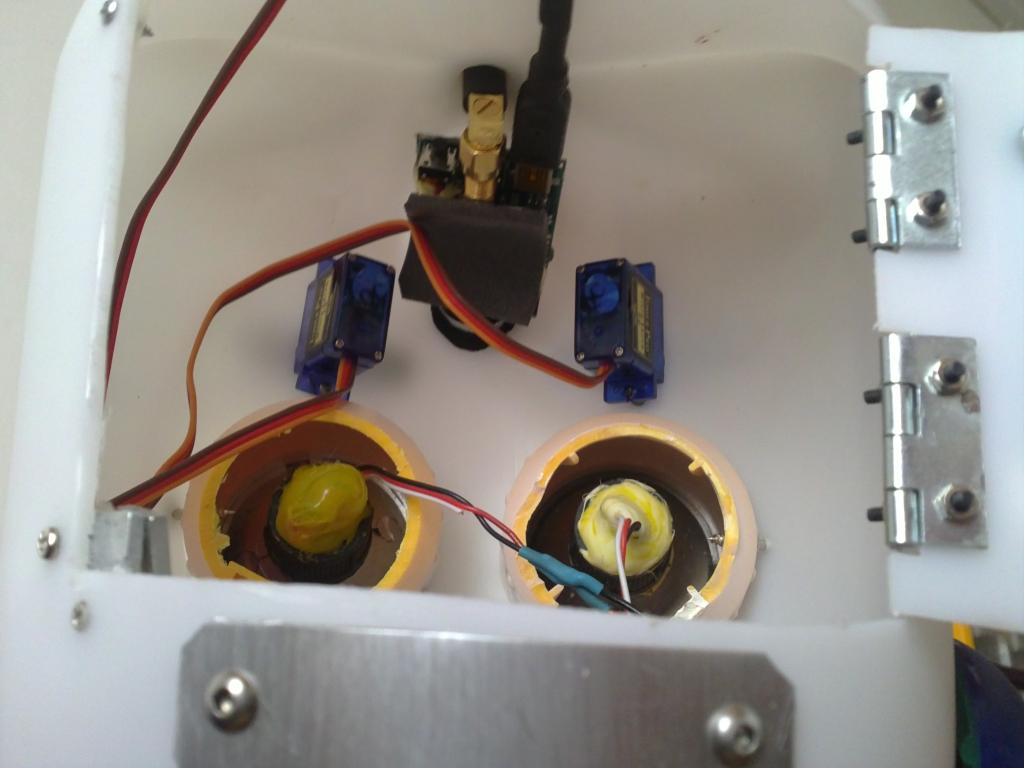














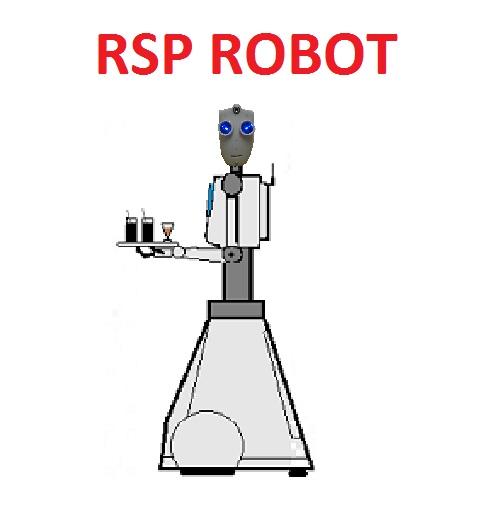
Hi all! I'm excited to share this project with you, this is the robot RSP, I bought my second ez-b (v3) and having checked with my first robot(MY ROBOT)
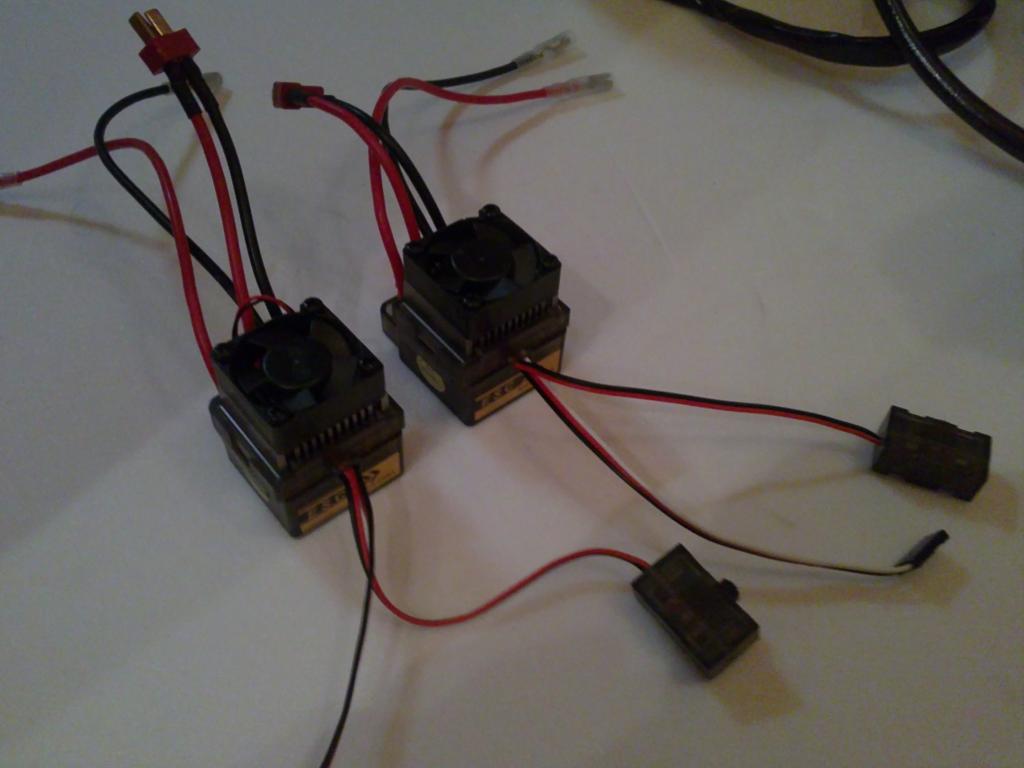
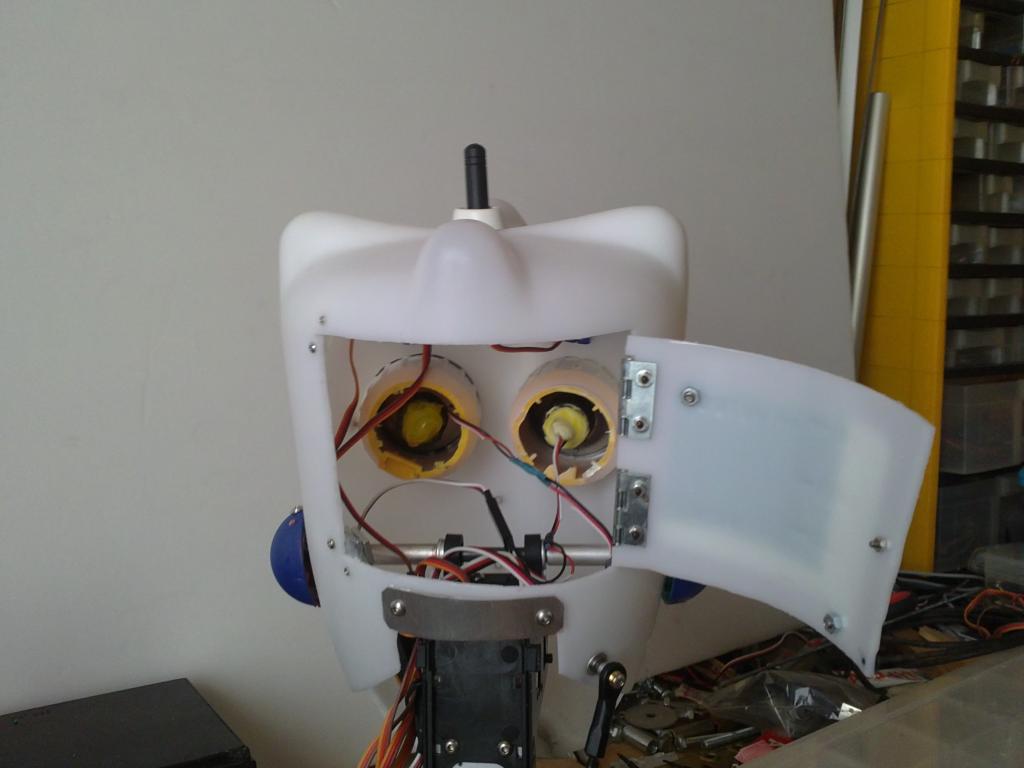
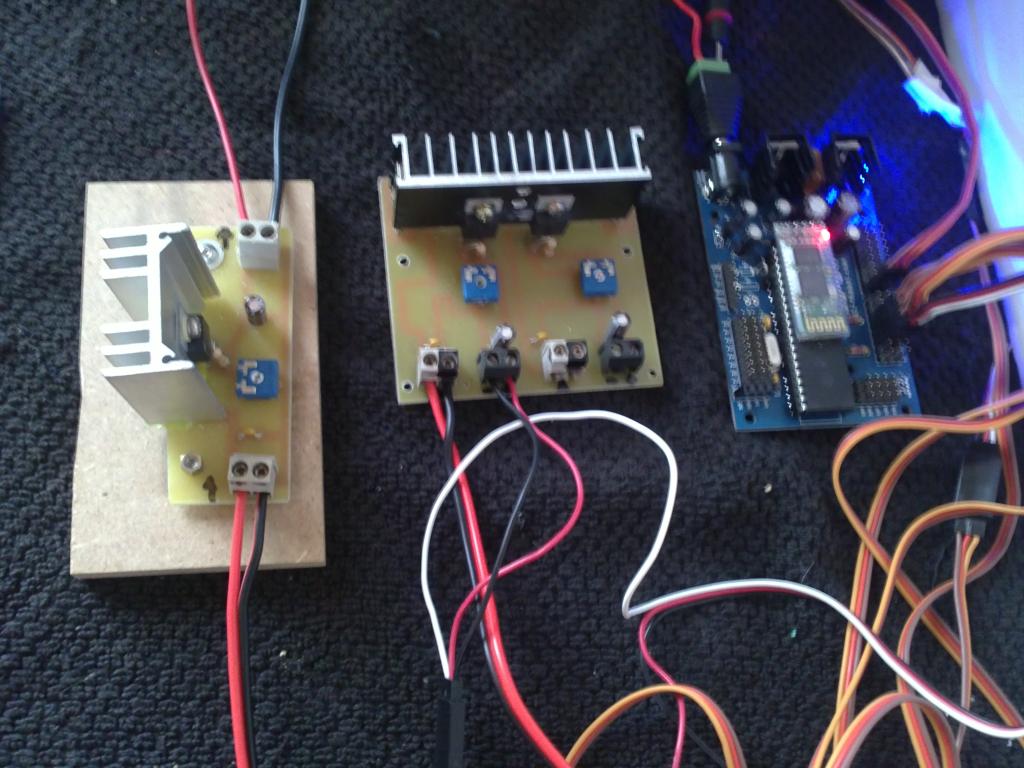
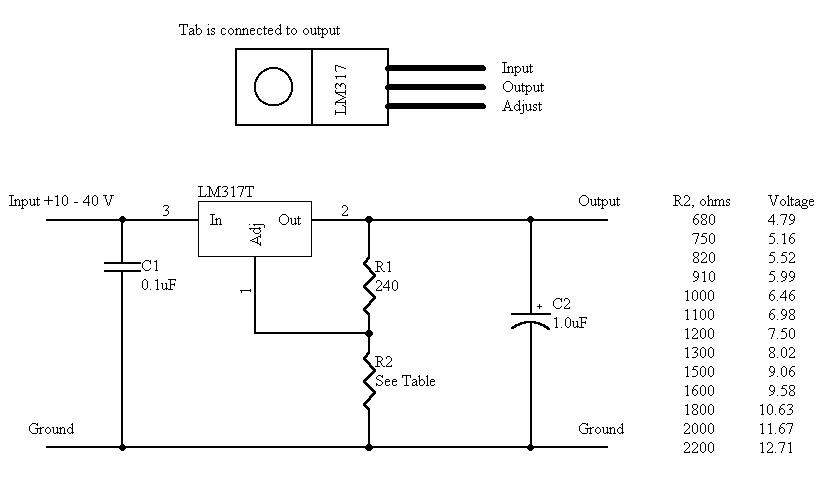
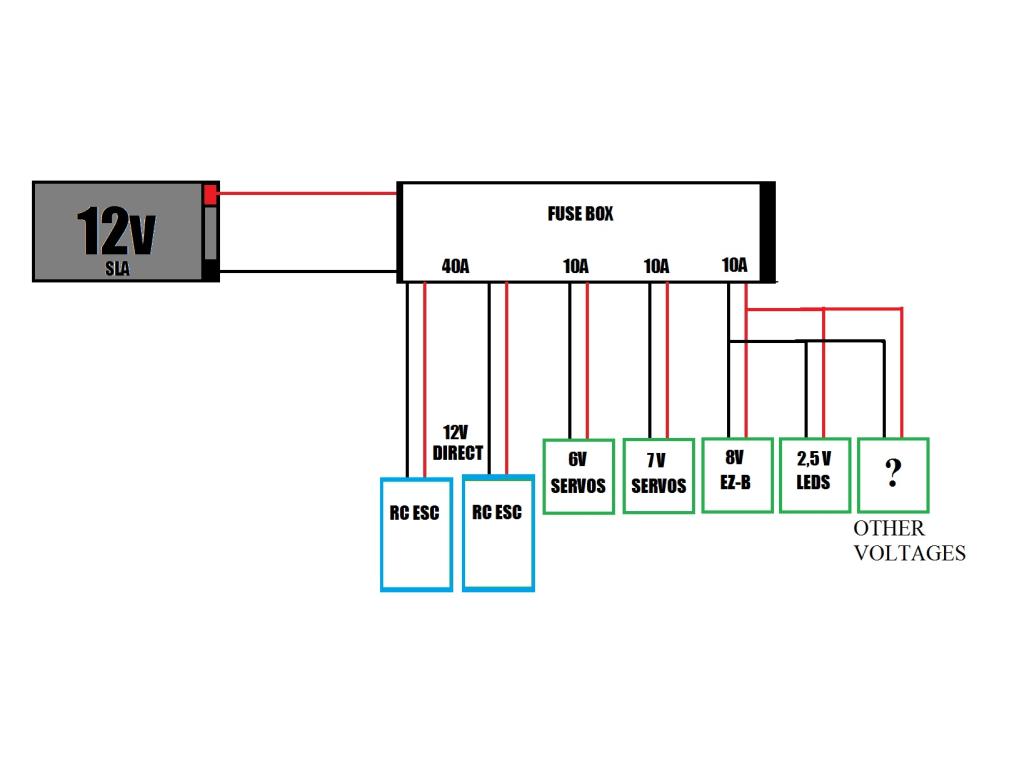
, I decided to undertake a larger project, its height will be of 5.4 feet (1.65 m), currently under construction I have the head, and gathered the materials for the traction system, some voltage regulators, 2 rc esc, several batteries, etc..
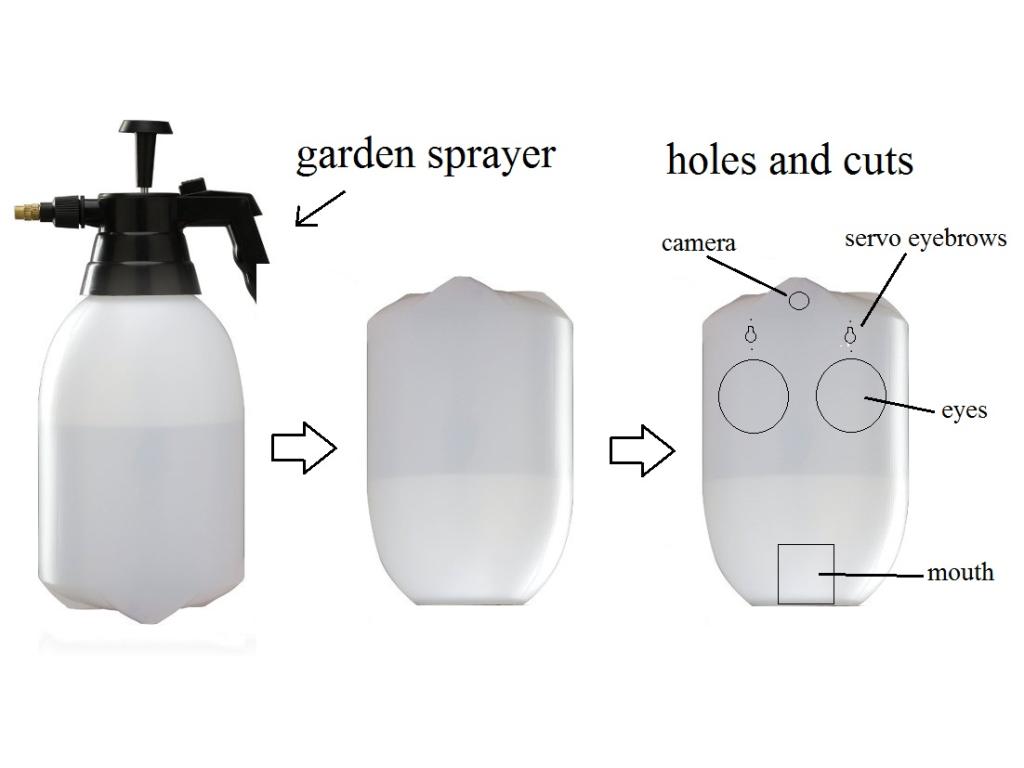
I enclose a drawing of how it will look when completed and some photos and video. I hope this project will have a mutual sense of teaching and learning for the entire community that will inspire others and that I may be inspired by all your valuable ideas, more information soon.


By R2D2
— Last update
Discover more robots
Drephreak's New Robot
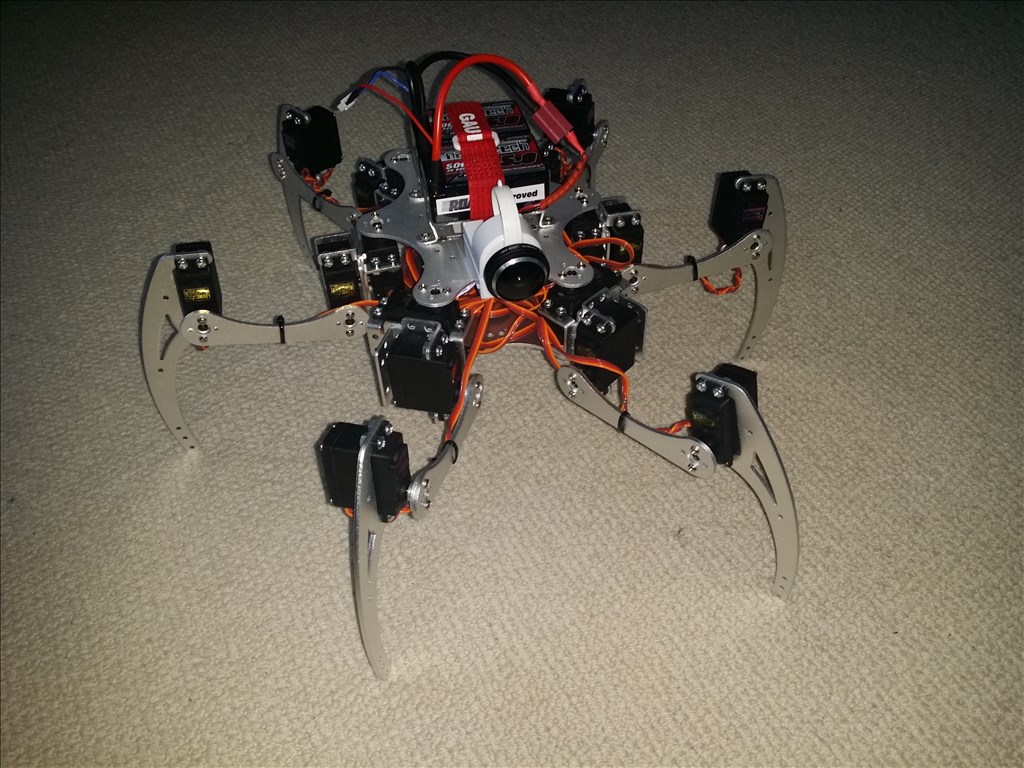
Hexapod using EZ-B and Synthiam ARC-walking in 2 hours; easy programming, aluminum chassis, servos, sensors, planned...

Igor's Robot Guard
Provide the webpage text or a brief summary so I can create a concise, SEO-friendly meta description.

Linux's Project Roll-X
Roll-X Stage One: a two-split wheel balancing robot, future ball roller and companion to Omega forming a dynamic robotic...

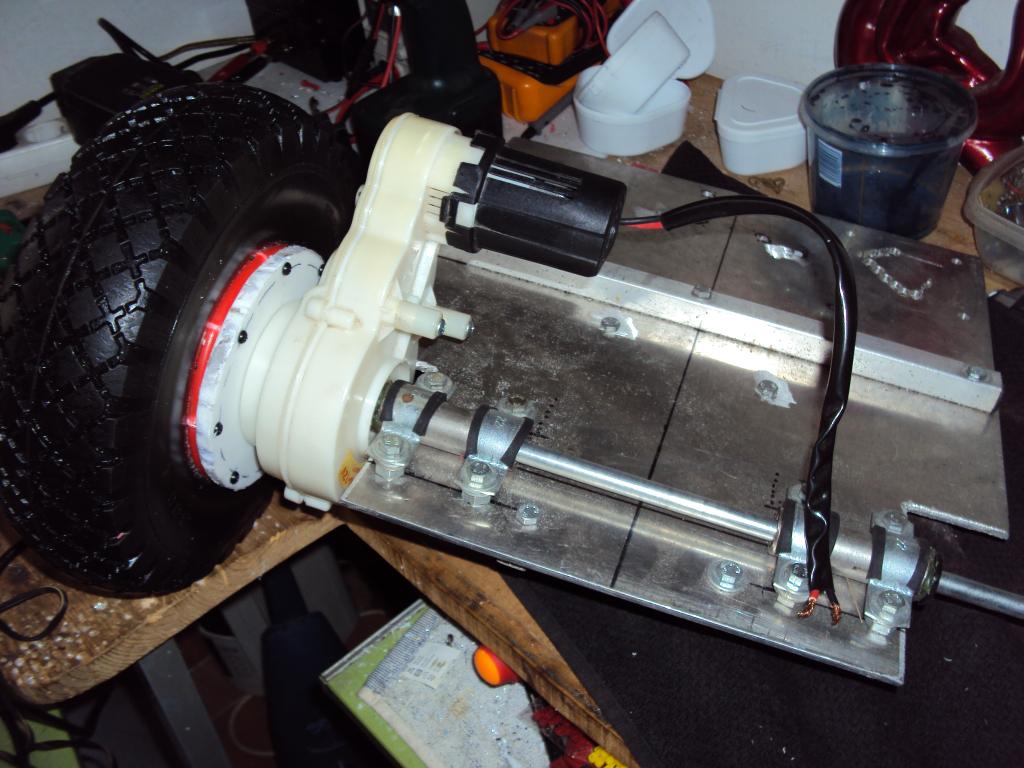
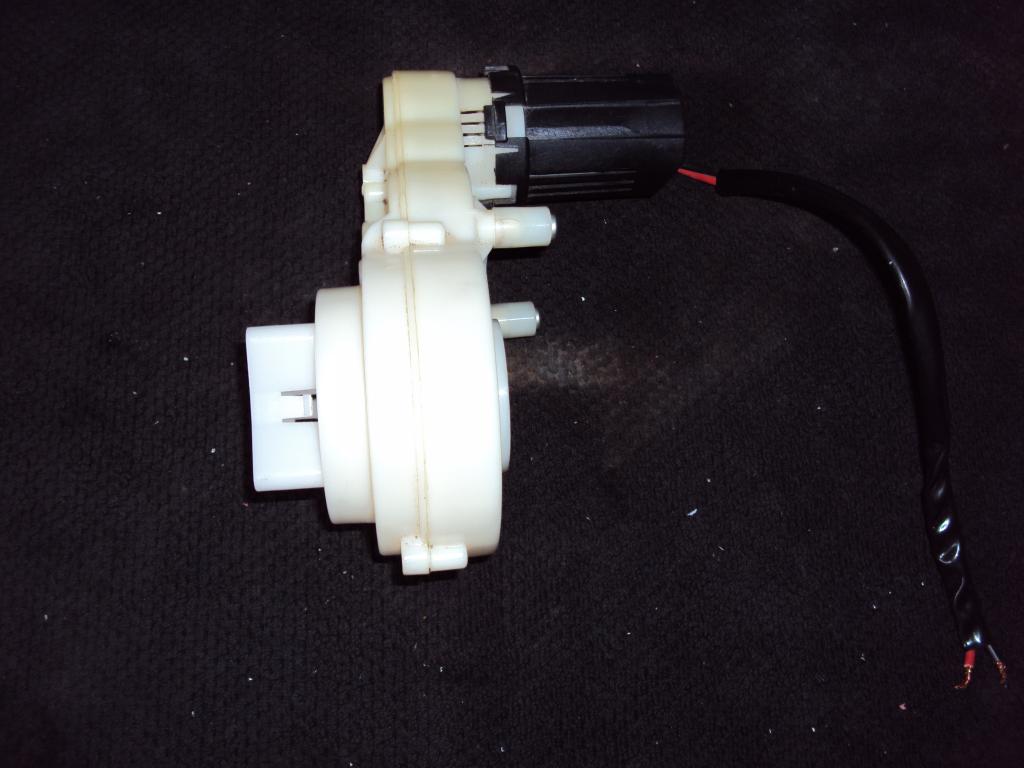
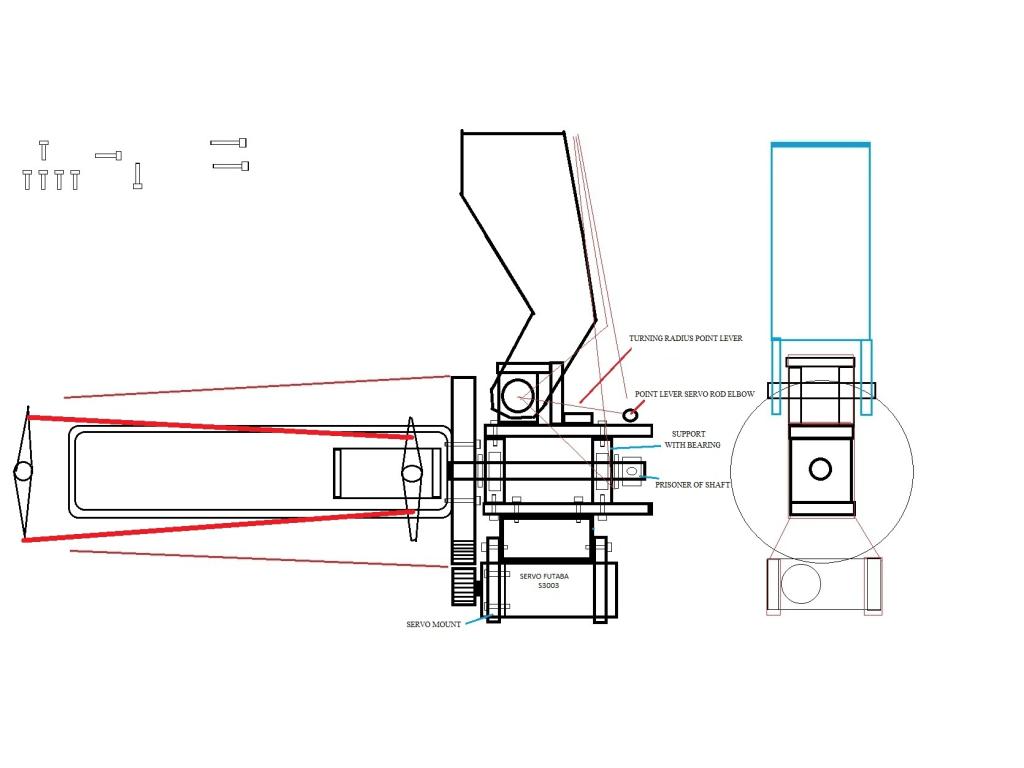
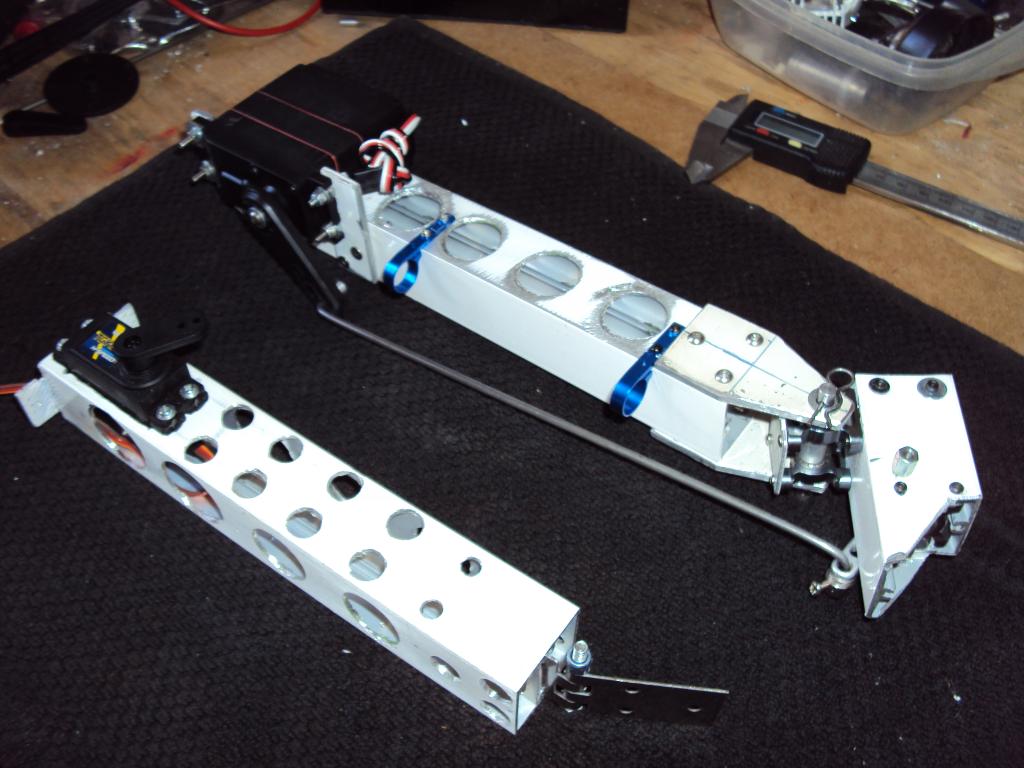
For the drive system with two motors utlizo dareway lowering vehicle, but the original wheels were discarded plastic, rubber and also those not clickable, are much better, with a diameter of 25 cm (9.8 inches) for use also in outdoor or urban areas.
The system original coupling between the wheel and the gearbox, had the shape of a star, this is cut and mounted on four large screws last gear. I also use a hard plastic table (cutting in the kitchen) and manufactured a screw cutro adptacion between the gearbox and the wheel.
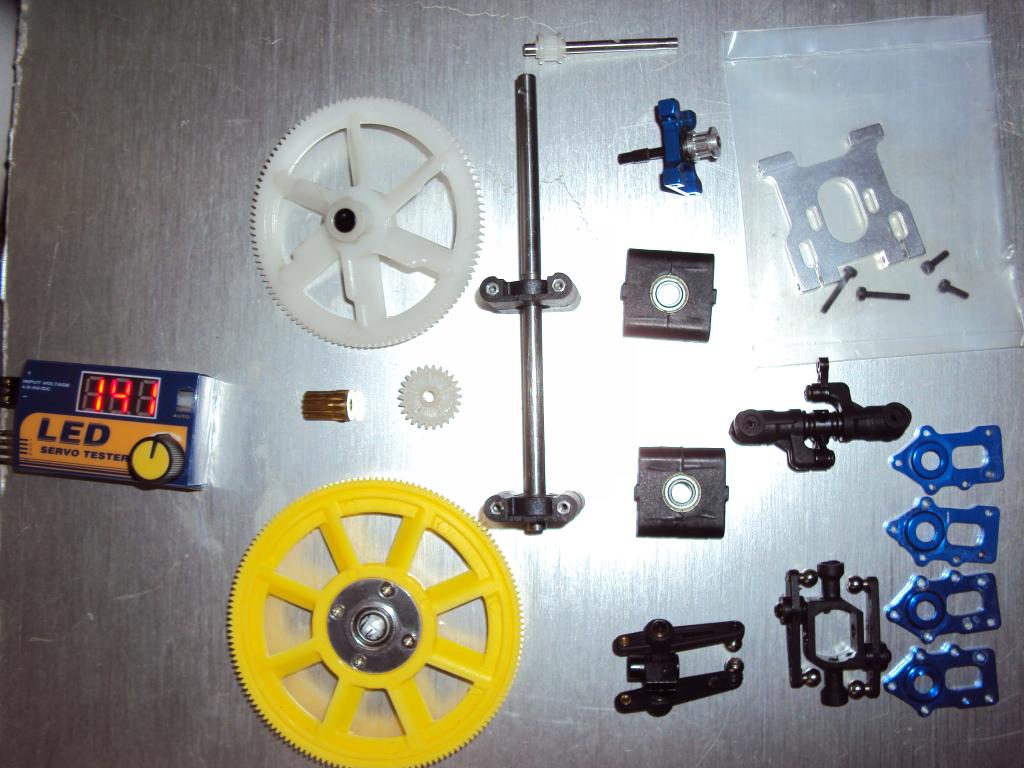
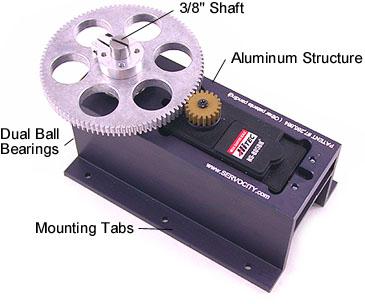
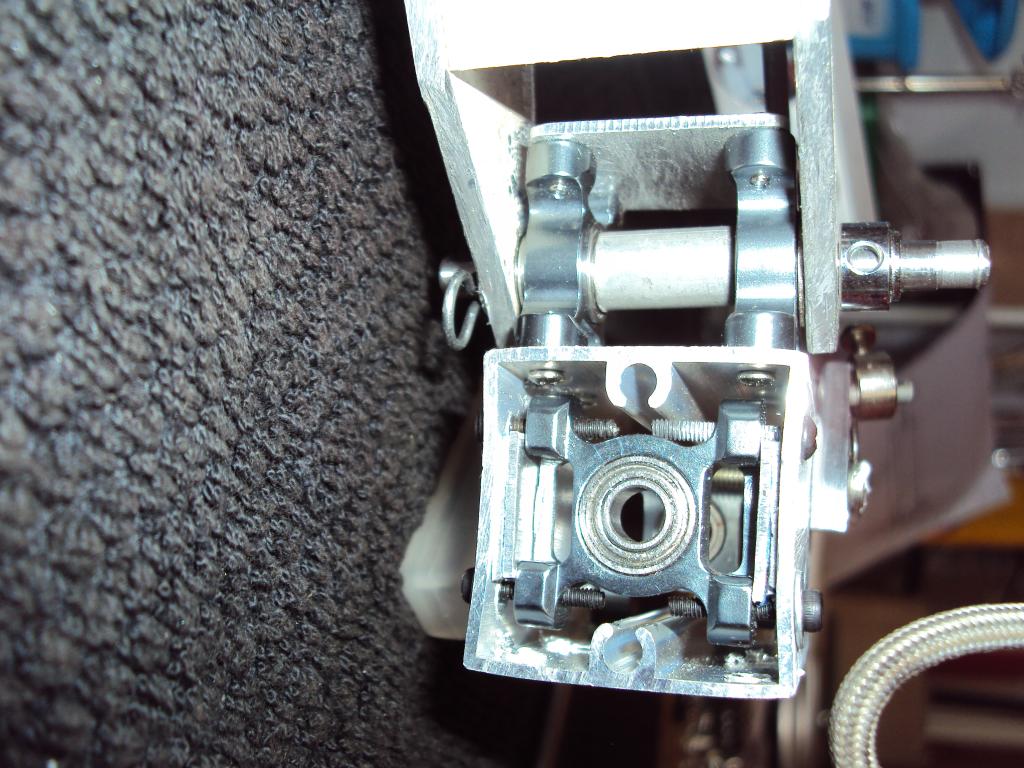
To prevent damage to the robot weight of the reducing gears, is used which traverses steel shaft and two wheels attached to cahsis aluminum, which avoids any torsion.. This easy axis is removed with a locking nut at each end. Besides the need to mount the L-shaped brackets between the gears and the chassis.
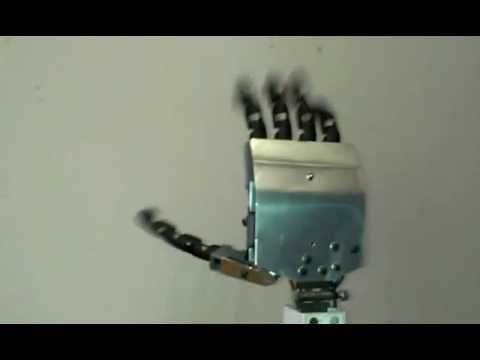
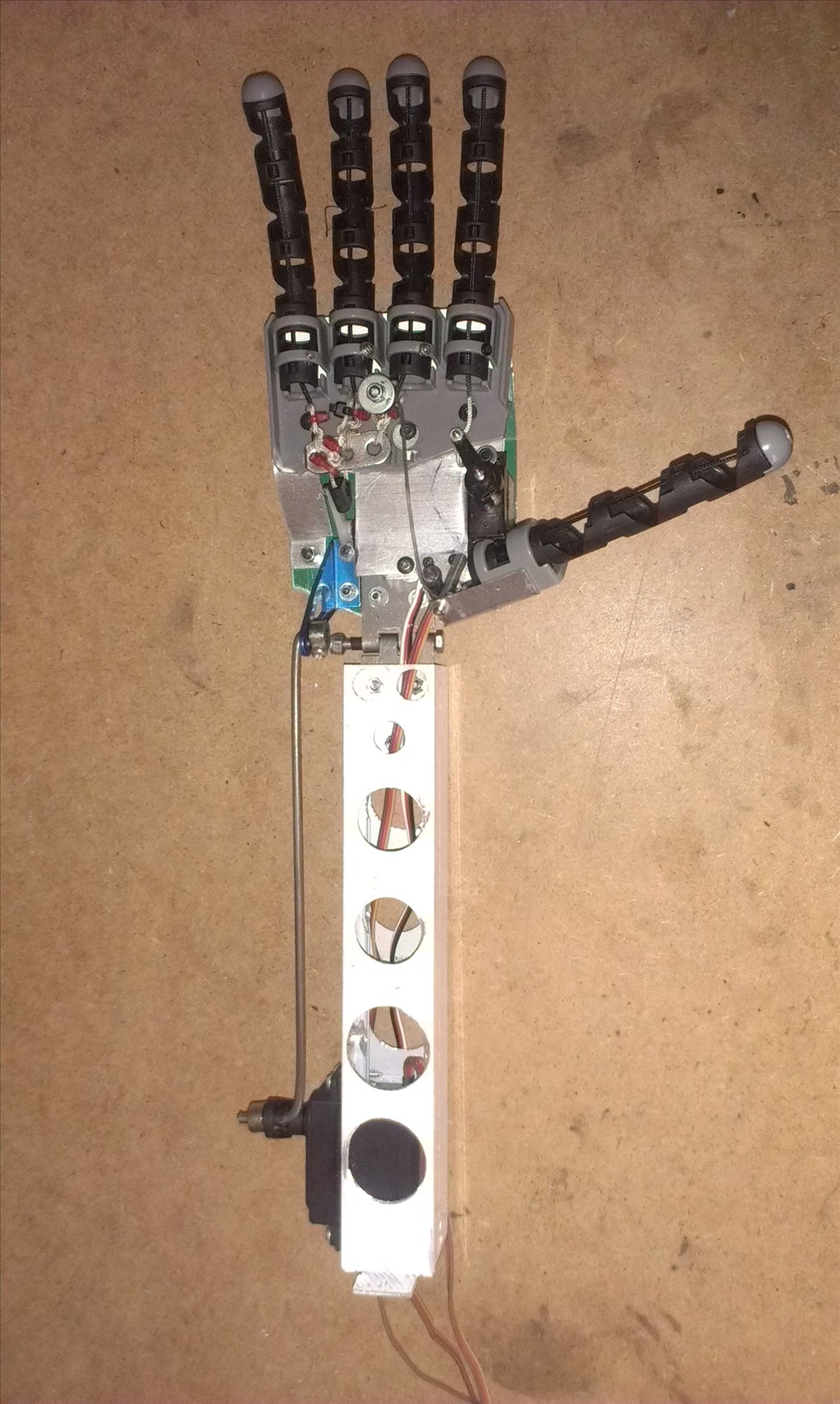
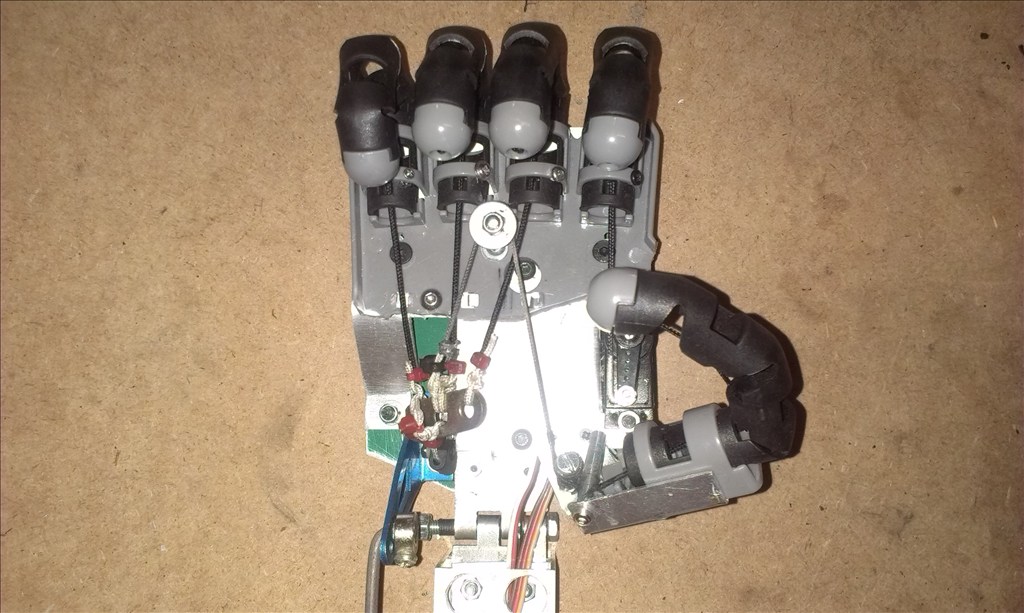
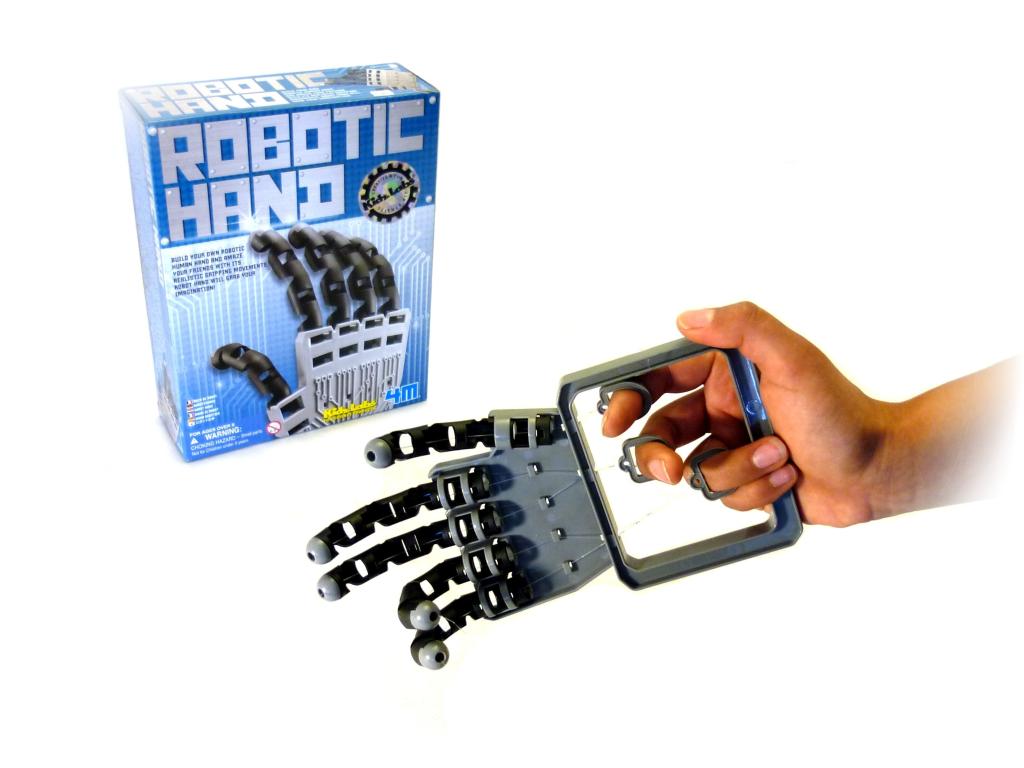
Small Project Update: The hand has been modified, two small servos move the fingers in a combination that lets you index finger pointing, waving or take very light weights. Thin aluminum board, small screws and rope did the rest. While working slowly and almost time for the robot, watch your projects and breakthroughs ez-b and marvel, and good luck to all the Dj revolution waiting!
Awesome project R2D2! I love the creative "hacks" on this forum...and well engineered/crafted hand too I might add
That hand is awesome! As well as your drive system! Nice manufacturing.
Good job rsp!
Thank you all! Here are some videos of the hand, need a good injection in my wallet to end the arms, but donations accepted, haha??.
I'm loving the hand, I plan to do similar on my big build when I eventually get to it. how strong is the grip on it?