

I haven't shown off a new robot (other than Revolution ones) for a while so it's time to start a new topic for one of the few I'm currently working on
EZ-Rover MK 1
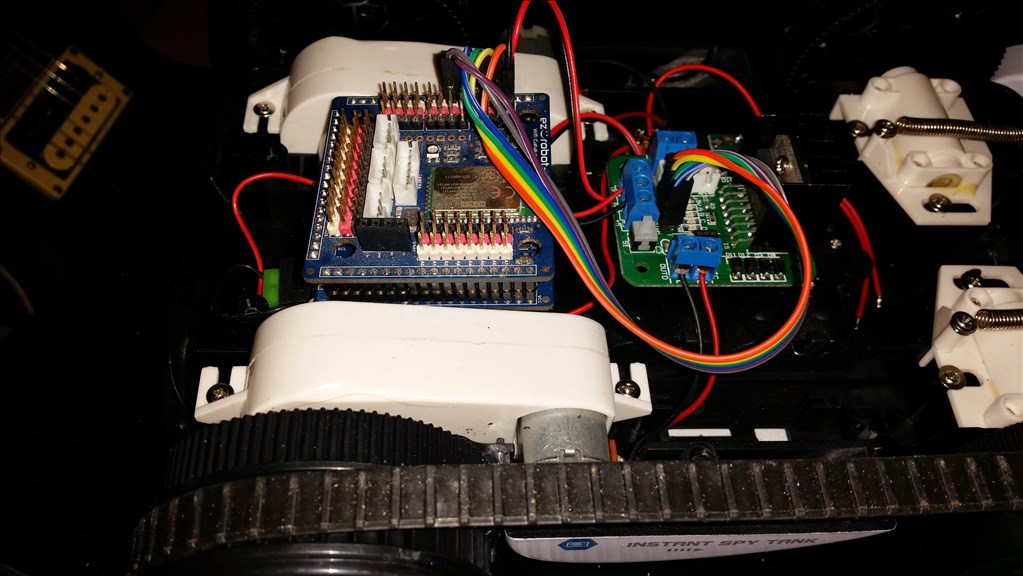
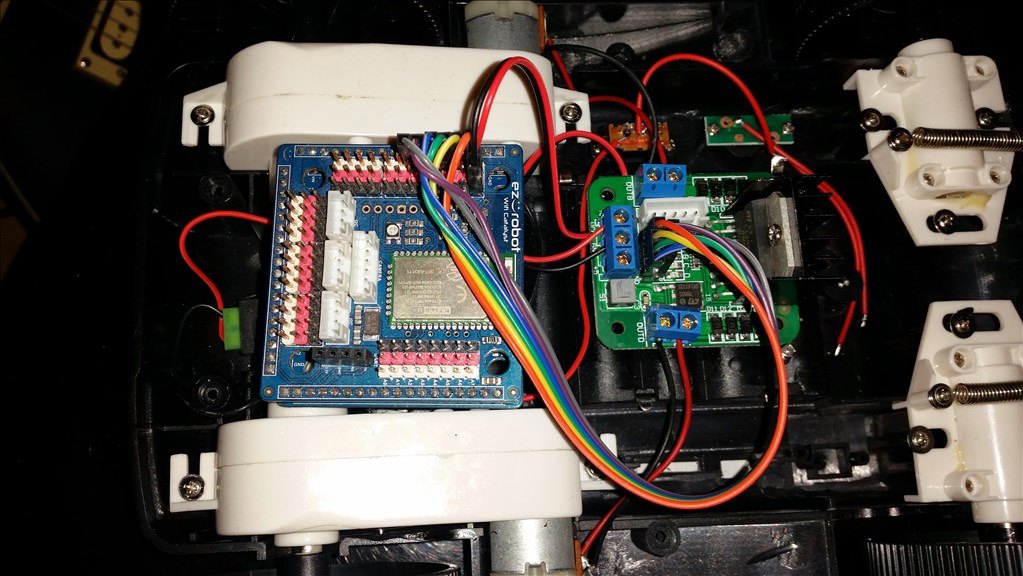
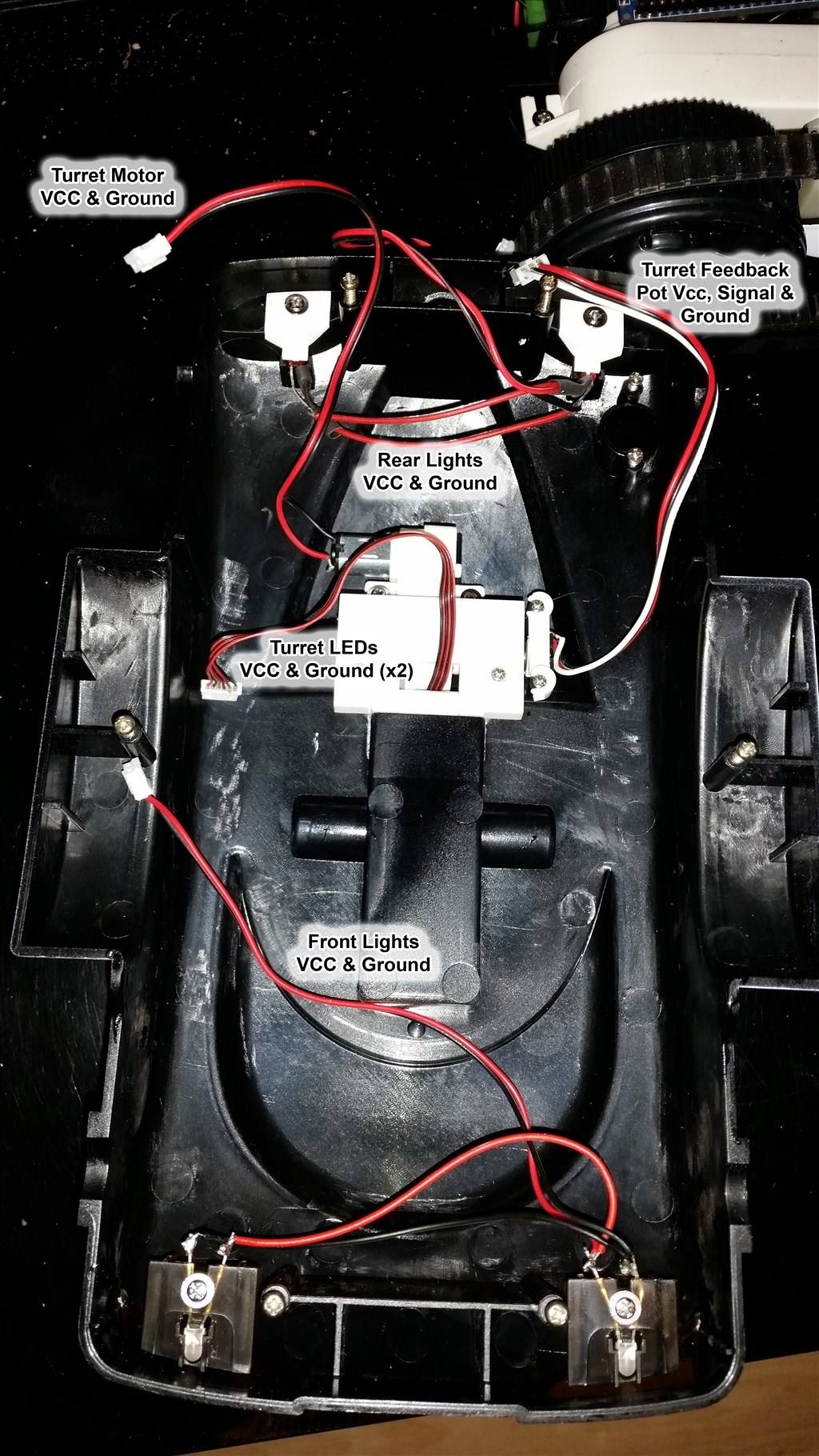
Originally a WiFi controlled tank which looks based on the Brookstone rover. The WiFi was not easily hackable and it was much easier to just gut it and replace the internals for an EZ-B, H-Bridge and EZ-B Camera.
Originally it was run on 6 x AA batteries so I have kept that set up and using the existing moulded battery compartment just wired directly to the EZ-B.
This will be 100% autonomous and it's purpose will be to roam the ground floor of my house.
IR and Ultrasonic sensors will be fitted to it all around (space permitting) and collision avoidance done with a modified version of my ping roam adapted to use multiple sensors rather than a rotating sensor.
More to follow when I open it up again to fit the camera in there.






Discover more robots

Cardboardhacker's Emotions V1

Gwen4156's The G-Bot (Gwen's B9 Robot Project) Gets His...


Very nice! It certainly has your Style Rich!
Tony
@Rich... That pop up hatch in the top, is that servo controlled? Nice, can't wait to se what you do with it...
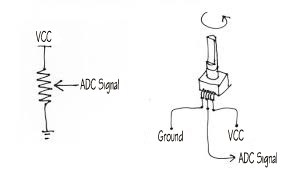
At the moment the original motor is still in there to lift/lower and I'm tempted to keep it there and experiment with some feedback pots or switches, something different and not as straightforward as the easy way (the easy way is best but I like to do things the hard way).
@Rich.
From what I know if you, you certainly don't take the easy road. But than, that's what you do. Take something, do it "the hard way" and come up with something fantastic. Besides, things are more interesting when it's a challenge. The rover really does look pretty cool and I really look forward to your progress to what you will achieve with this.
Good Grief Rich, your tank mod is going great so far, think you might use LI packs inside ?
Rich, I will definitely be following this one..... Can't wait to see how you trick out this bot. Does it have any problems skid steering on carpet? What are you going to use to control the motors?
I don't have carpets downstairs so it's not an issue. I will test it on the two carpets (one is a deep shag too) upstairs though at some point.
The original motors in it are controlled by the EZ-Robot H-Bridge with PWM speed control. One of the things I will be working on with this robot is centering down a corridor so speed control is a must.
It's going to remain a pretty basic robot but will be used to test and play around with a whole bunch of controls. Maze solving, object avoidance and navigation using various tracking methods are amongst the top few things on the list.
@Rich.... I am sure you have already figured out how to navigate the hallway... I used 1 side mounted ping and a front mounted ping on my inmoov so he would stay a fixed distance away from the kitchen island as he navigated around it (in my inMoov video)...