




























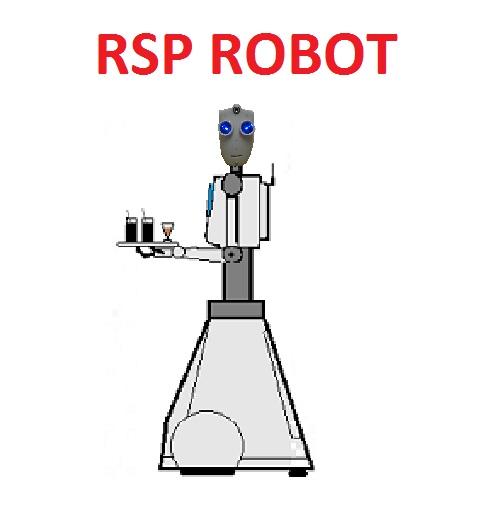
Hi all! I'm excited to share this project with you, this is the robot RSP, I bought my second ez-b (v3) and having checked with my first robot(MY ROBOT)
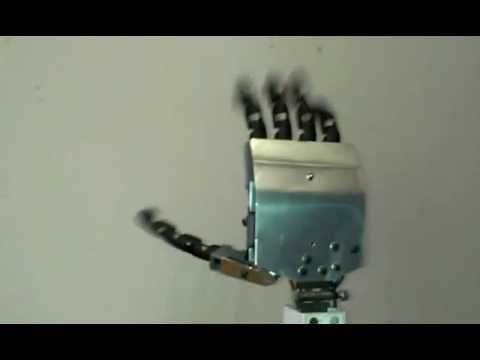
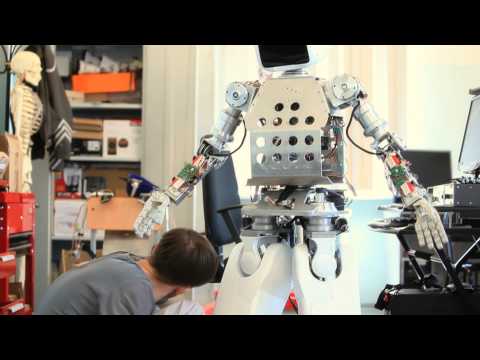
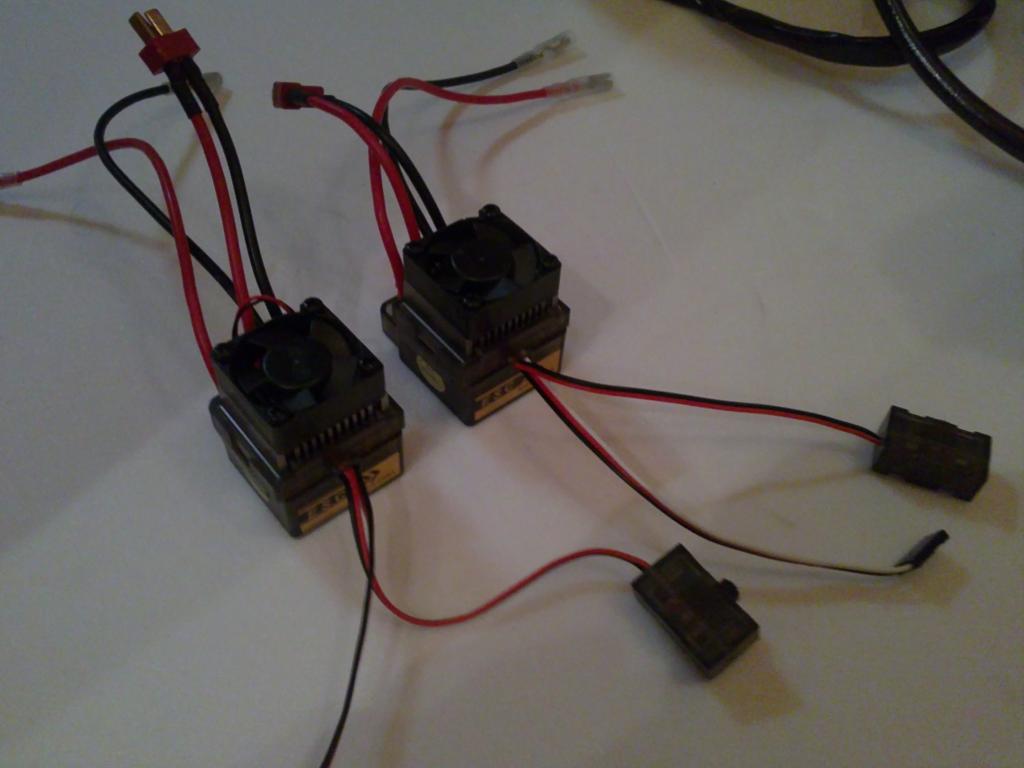
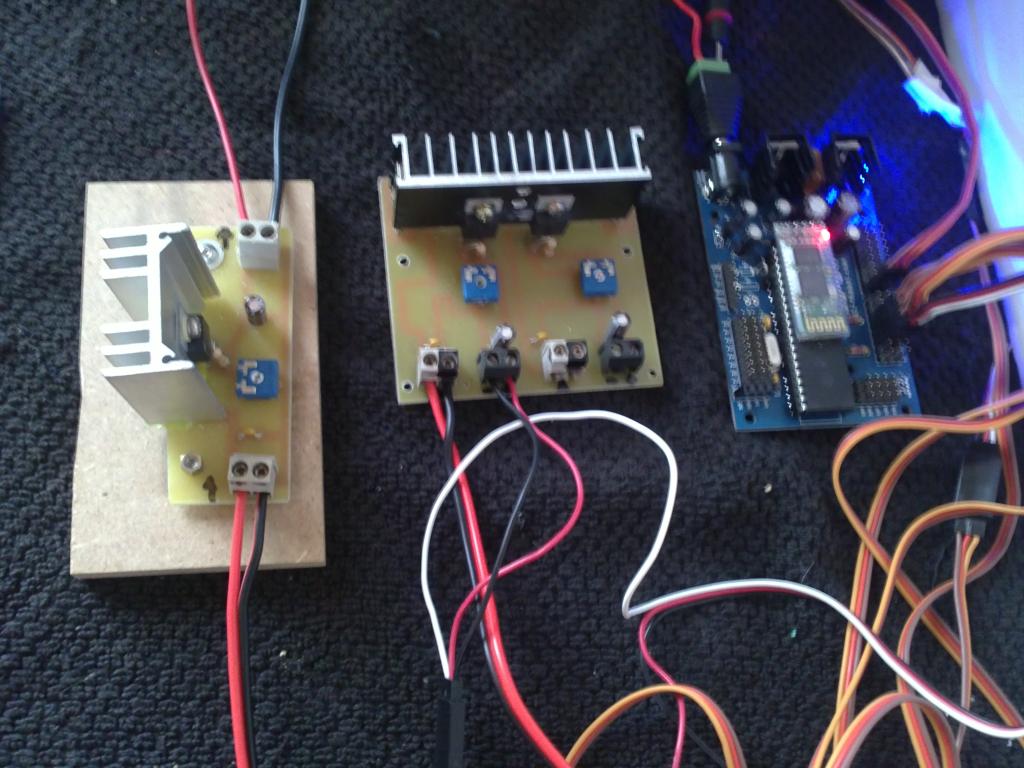
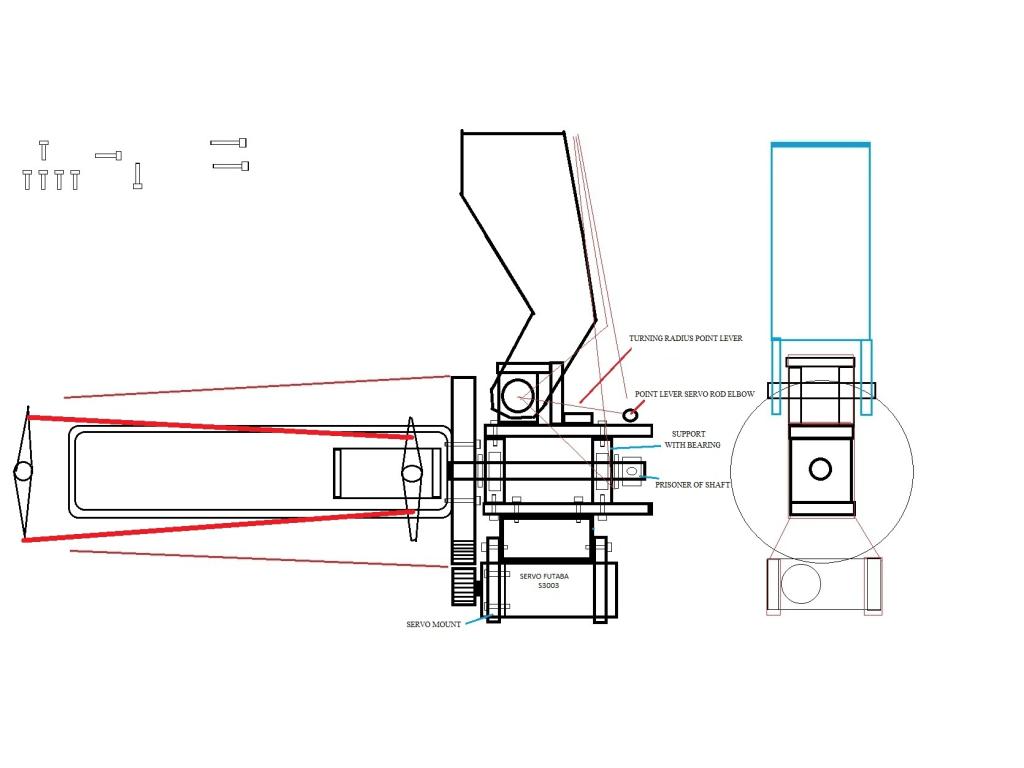
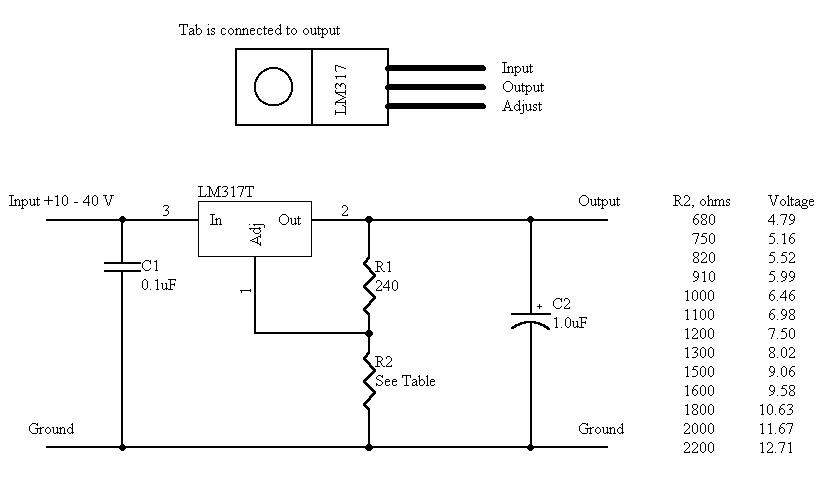
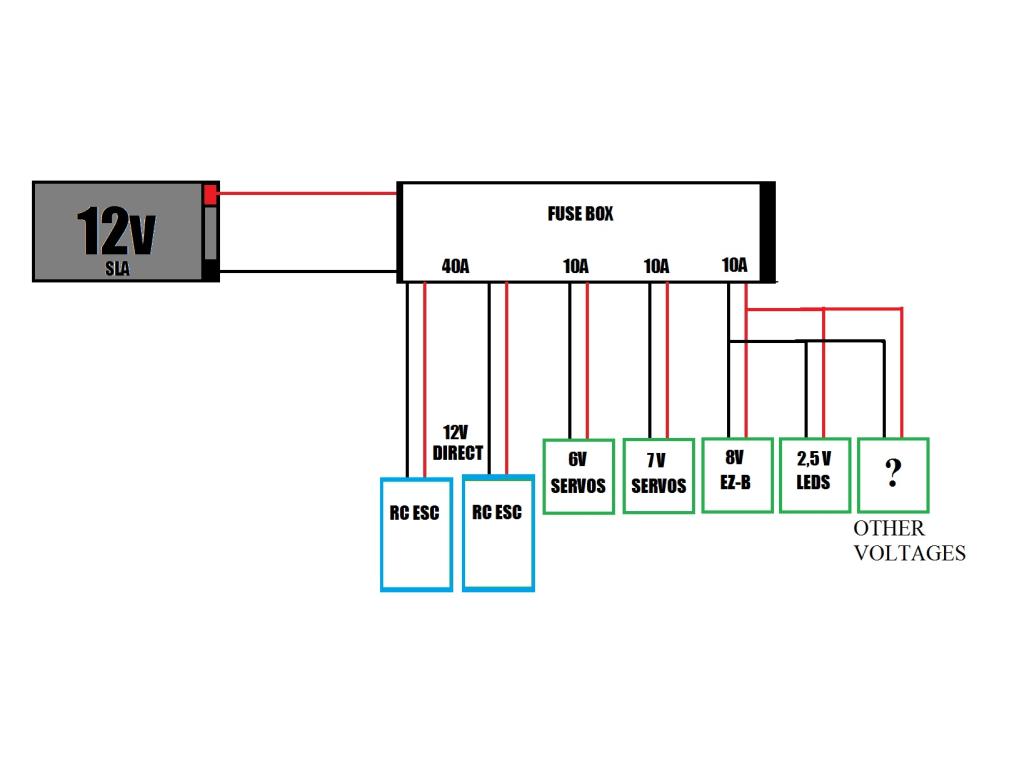
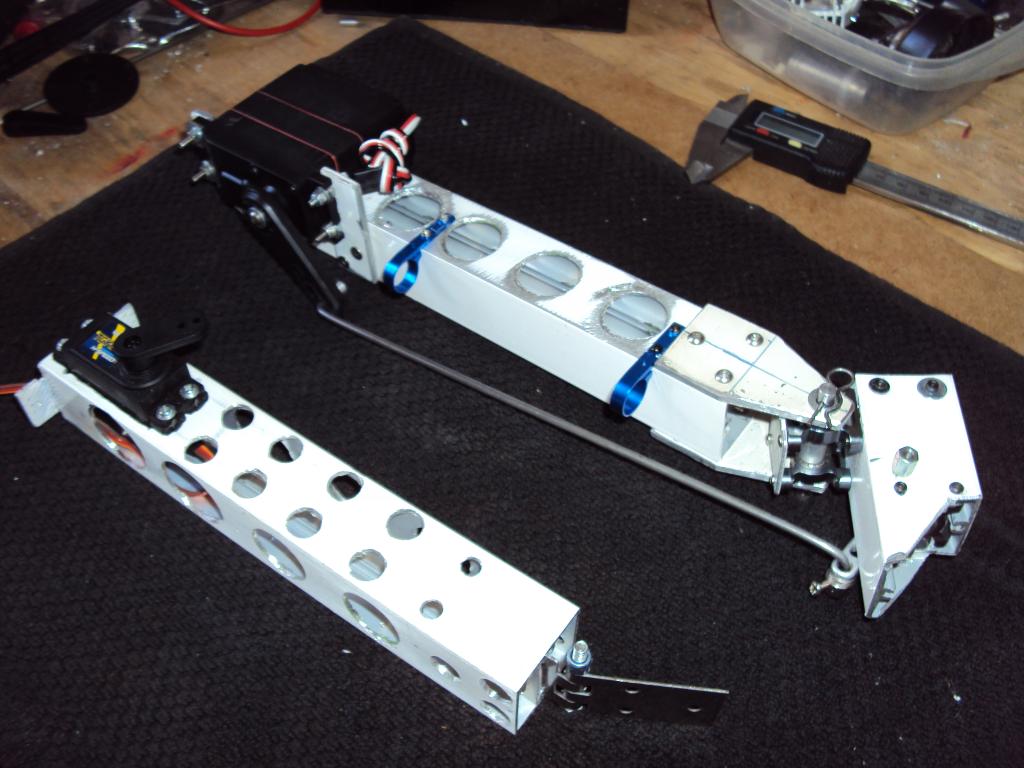
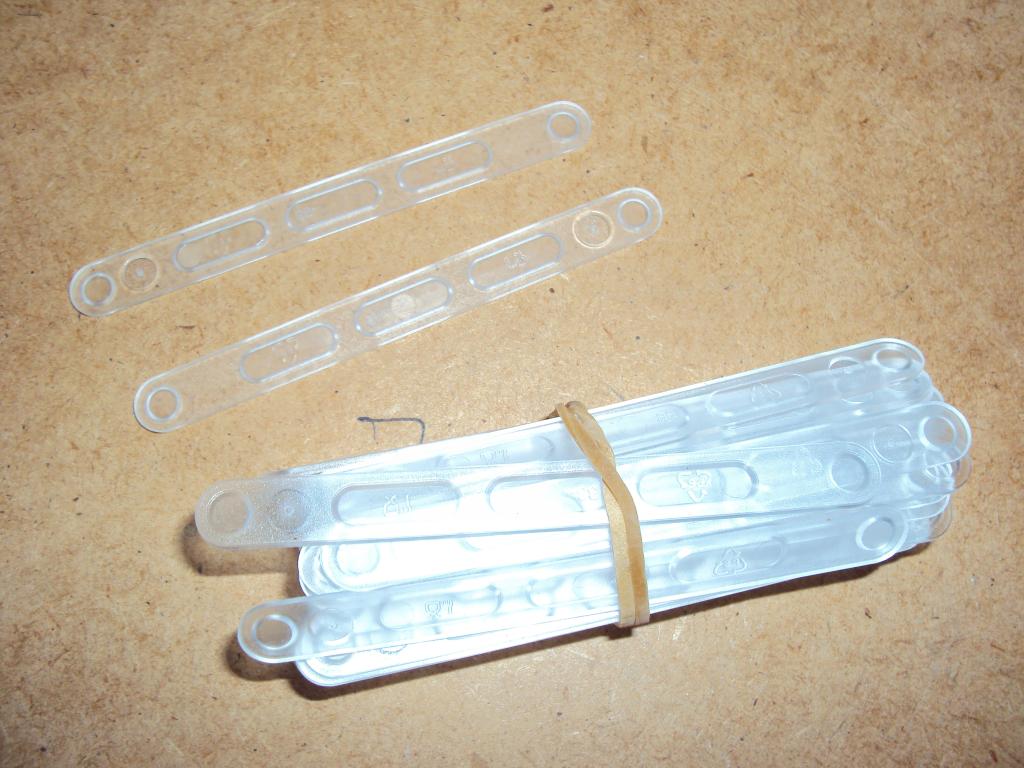
, I decided to undertake a larger project, its height will be of 5.4 feet (1.65 m), currently under construction I have the head, and gathered the materials for the traction system, some voltage regulators, 2 rc esc, several batteries, etc..
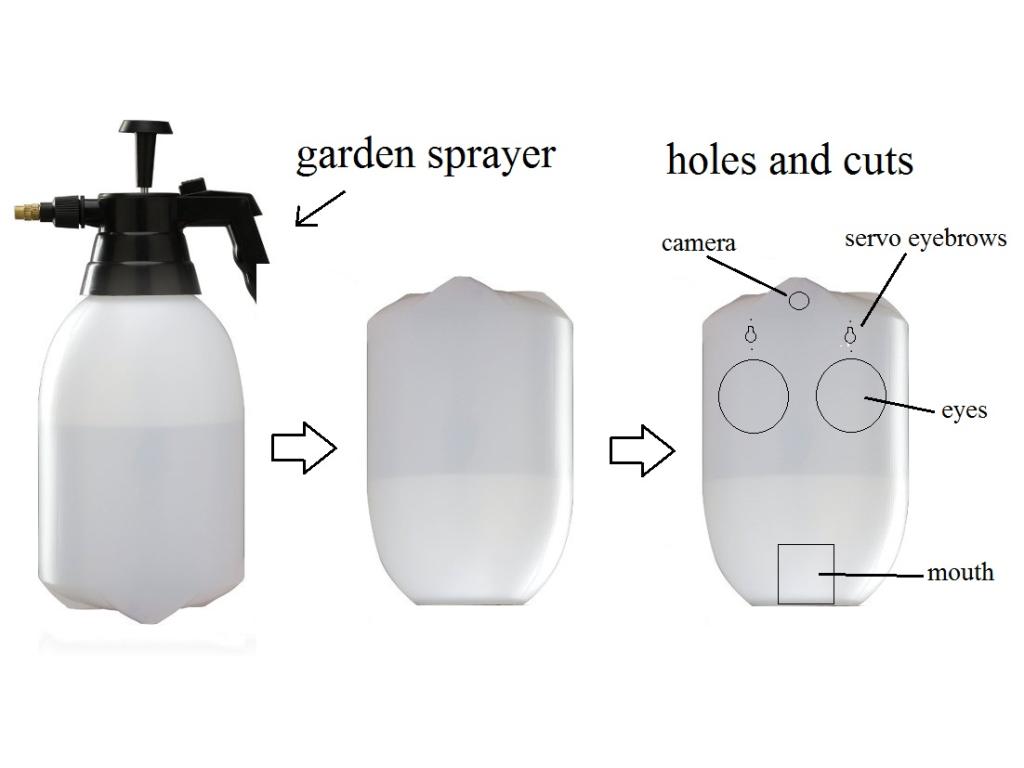
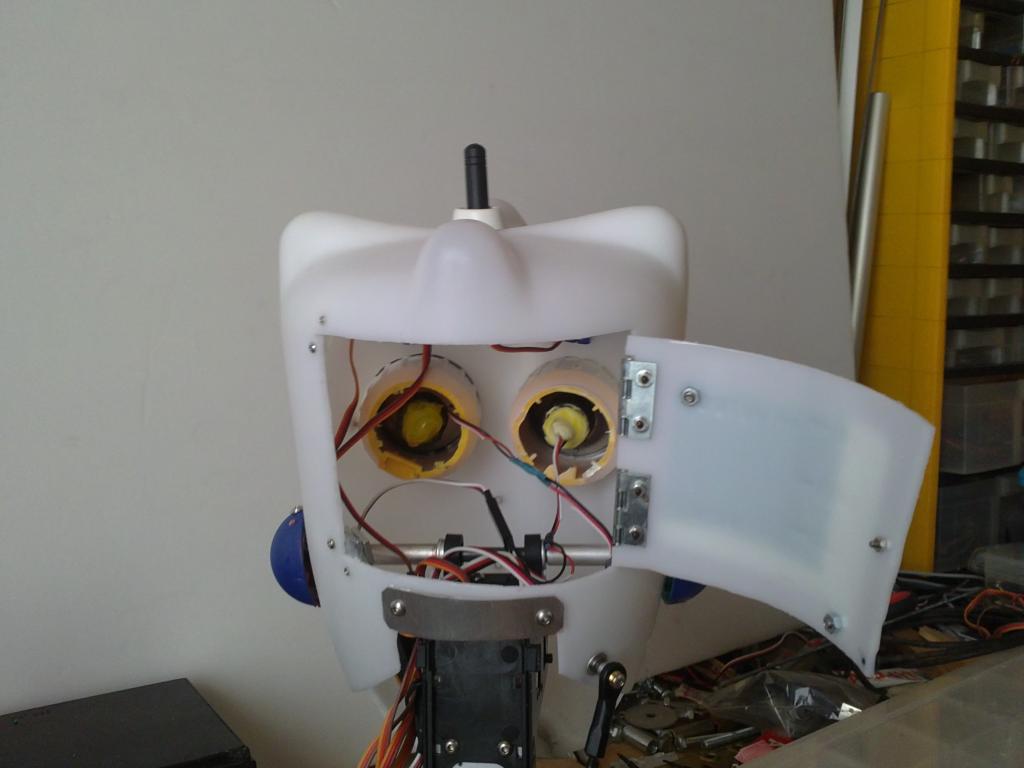
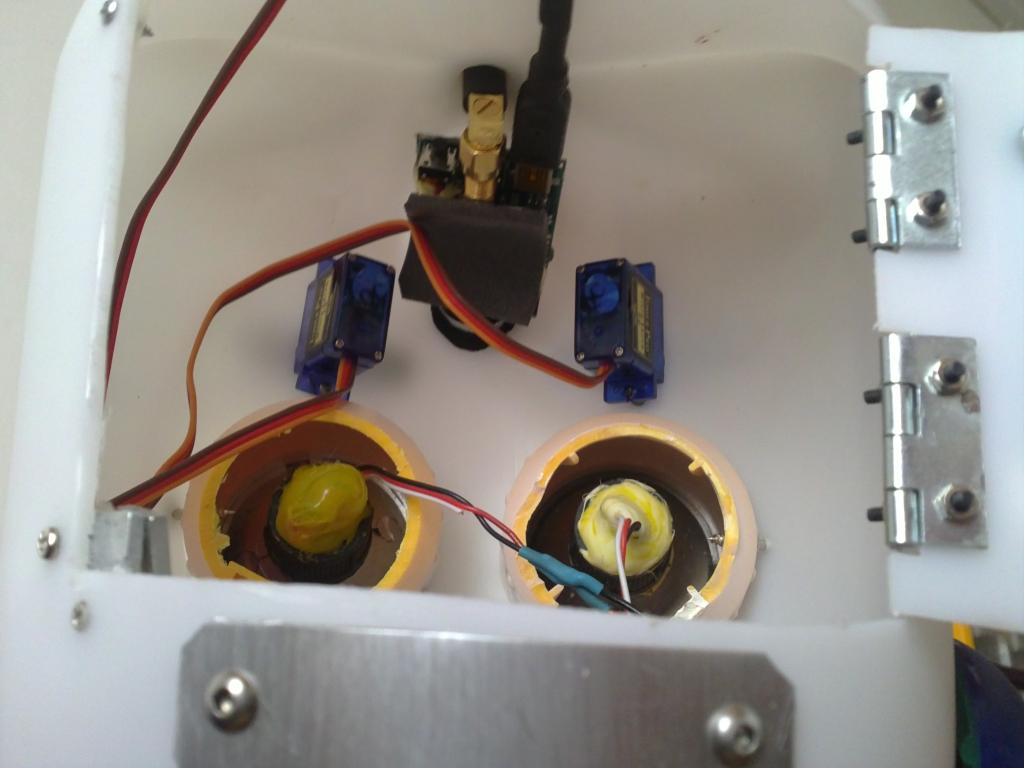
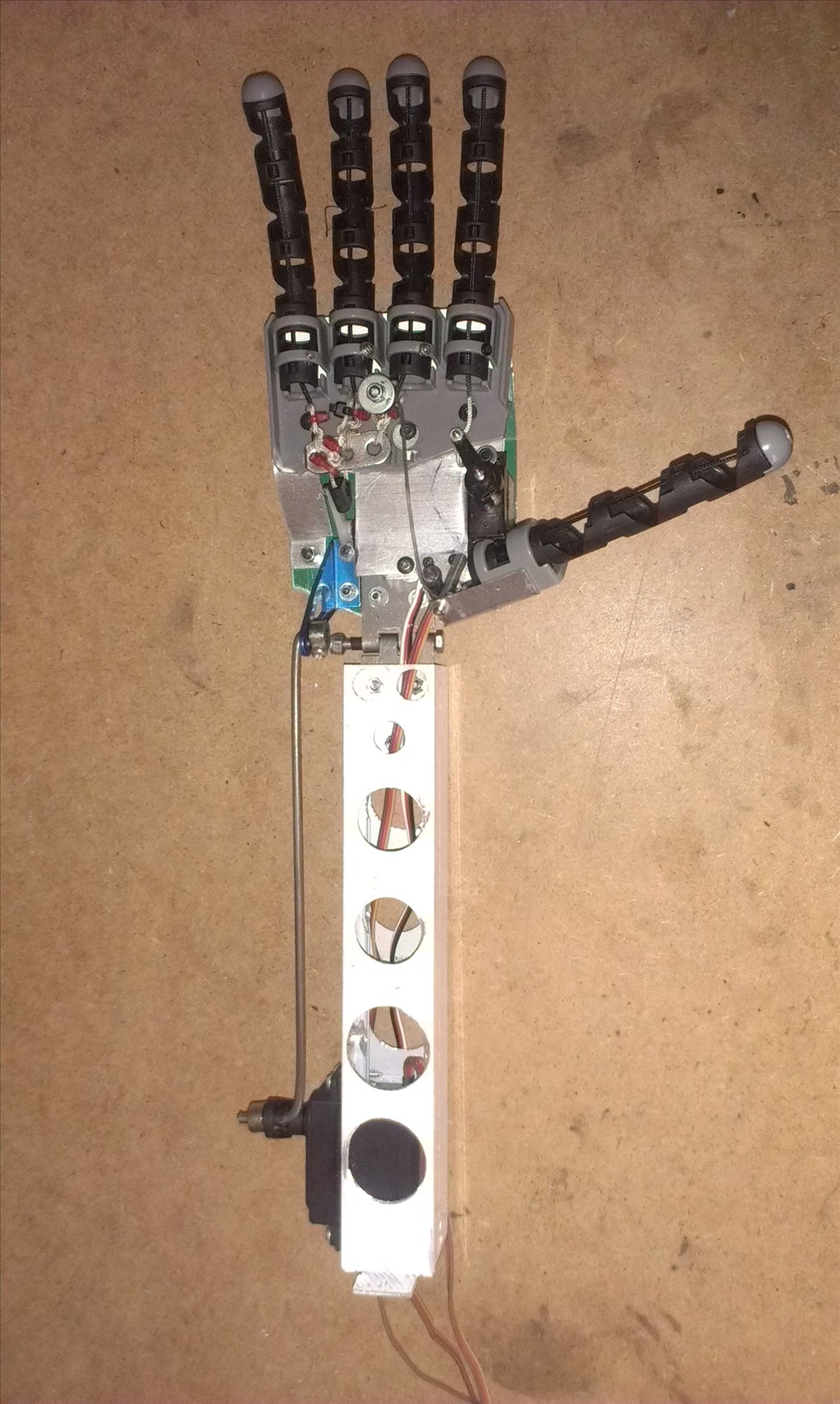
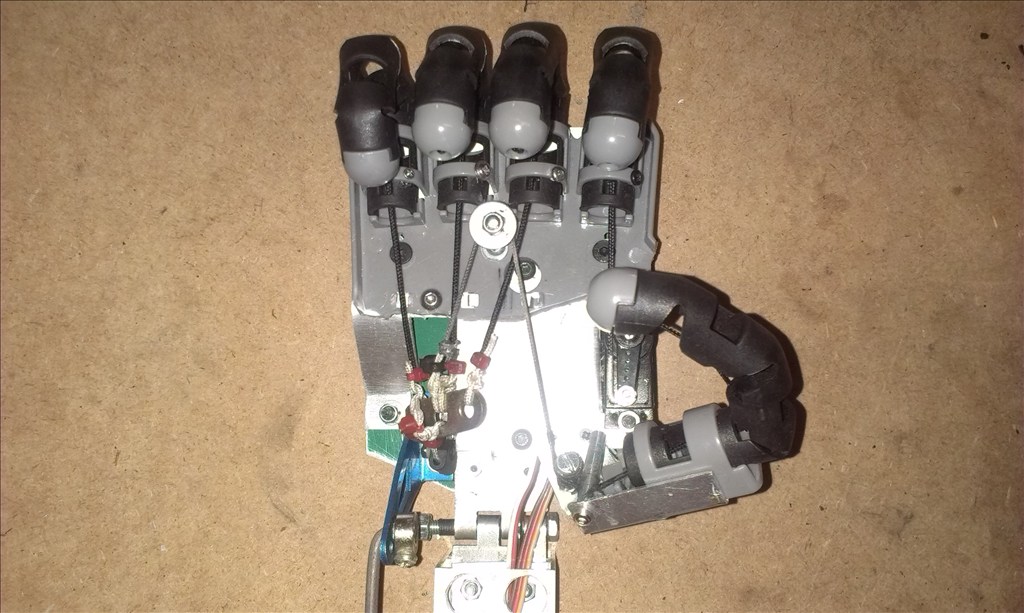
I enclose a drawing of how it will look when completed and some photos and video. I hope this project will have a mutual sense of teaching and learning for the entire community that will inspire others and that I may be inspired by all your valuable ideas, more information soon.


By R2D2
— Last update
Discover more robots

Williamk's Inmoov
3D-printed InMoov robot with functioning motorized parts, first prints and movement tests, minor fit tweaks, photos and...

Joseph4760's Say Hello To Little Frankie
Little Frankie robot downsized to 1ft, built from mixed parts, driven by 12V motors and 11.1V LiPo, running EZ-B V3 and...

DJ's Scarab Creepy Robot
Scarab robot retrofitted with EZ-B and Synthiam ARC for remote control, HC-SR04 autonomous exploring, voice recognition...

Very Cool!:)
LOL, I started Vacuum Forming some custom parts for a Scratch EZB Robot Build as well, with Camera mount and "EYES", similar to yours...lol!:) Very Nice.
R2D2 thats really cool !
Very cool!) nice work! Reminds me abit of one of the older models from the movie: I-Robot ,,,
Indeed RR333! the robot from "I robot" has been an inspiration to me, but I do not use titanium to build it, use a sprayer, garden should be recycled plastic and is a very hard blows, but easy to drill.
This is so cool! I too am planning on a large bot (after B9 of course) - I will be following your progress closely for ideas and inspiration.
Brilliant!!!!!!!
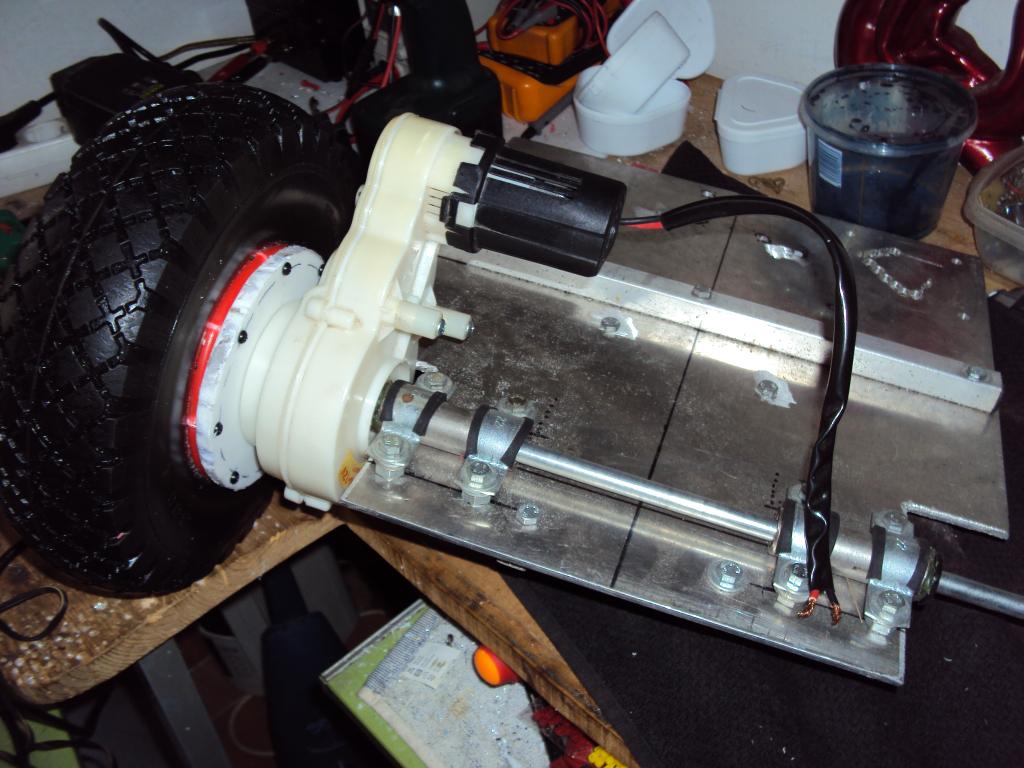
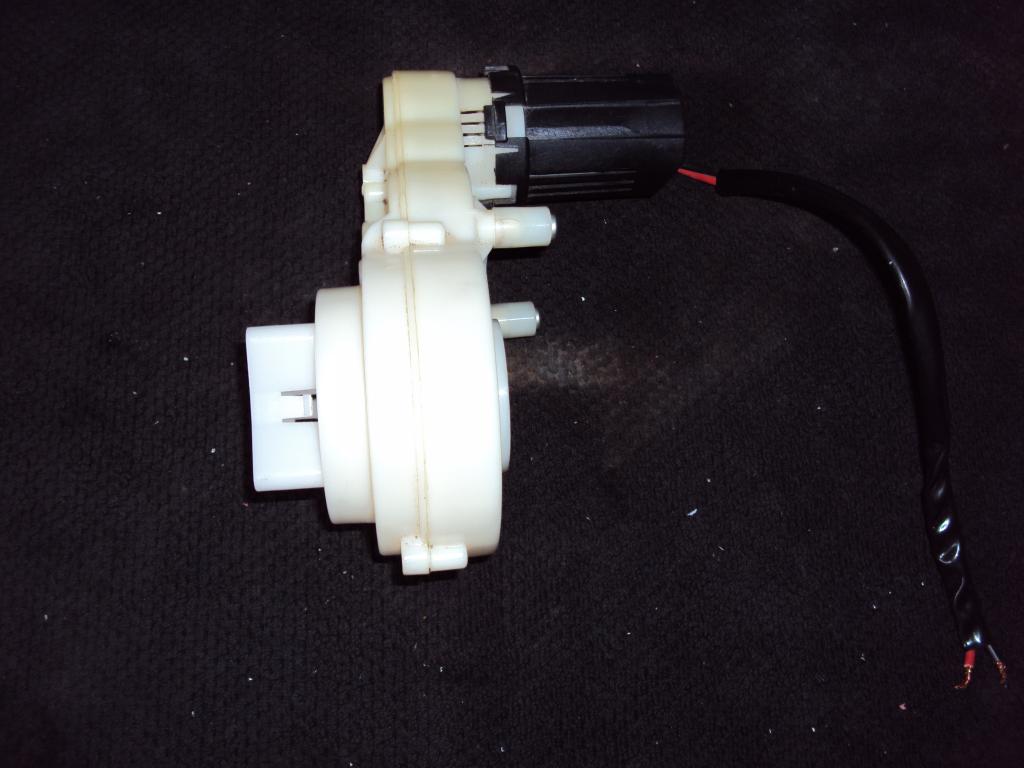
Go! few lovers of big robots, I'm glad there's another story for recycling. After searching and searching for a strong traction system, reliable and economical, escontre this: DAREWAY.
is the child version of the Segway. I could buy one used and extract their powerful engines with gearbox, a 12V 7A lead battery and the axis of the wheels (very important so that the weight does not damage the gear reduction) all riding on an aluminum cut to size. The original wheels were discarded because they were dareway plastic in return bought a wheelbarrow rubber wheels that offer much more grip and traction.