































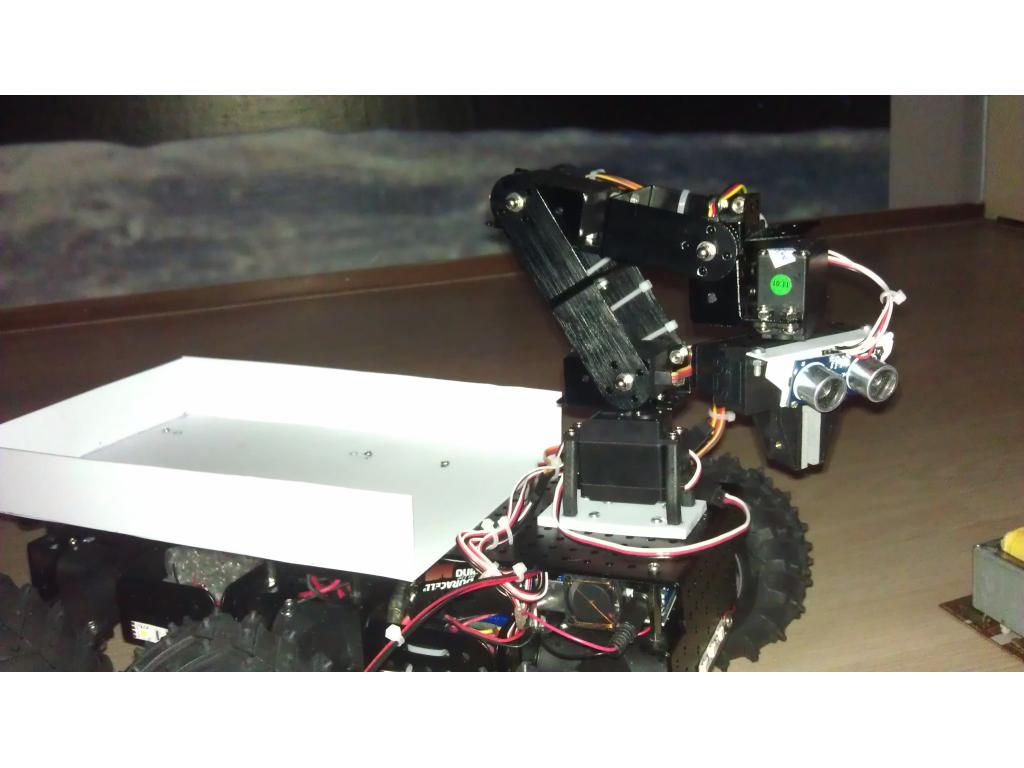


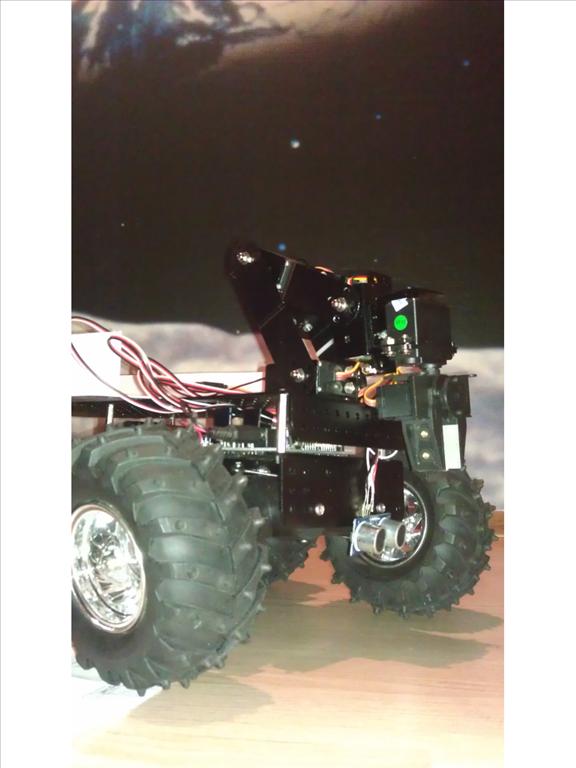
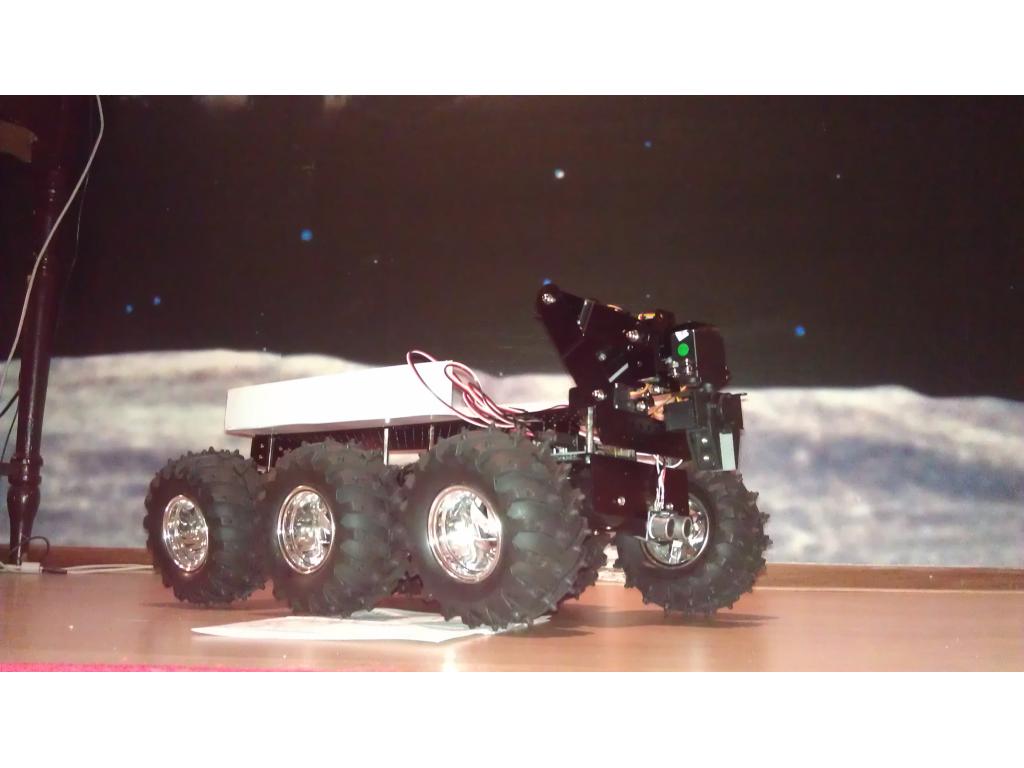


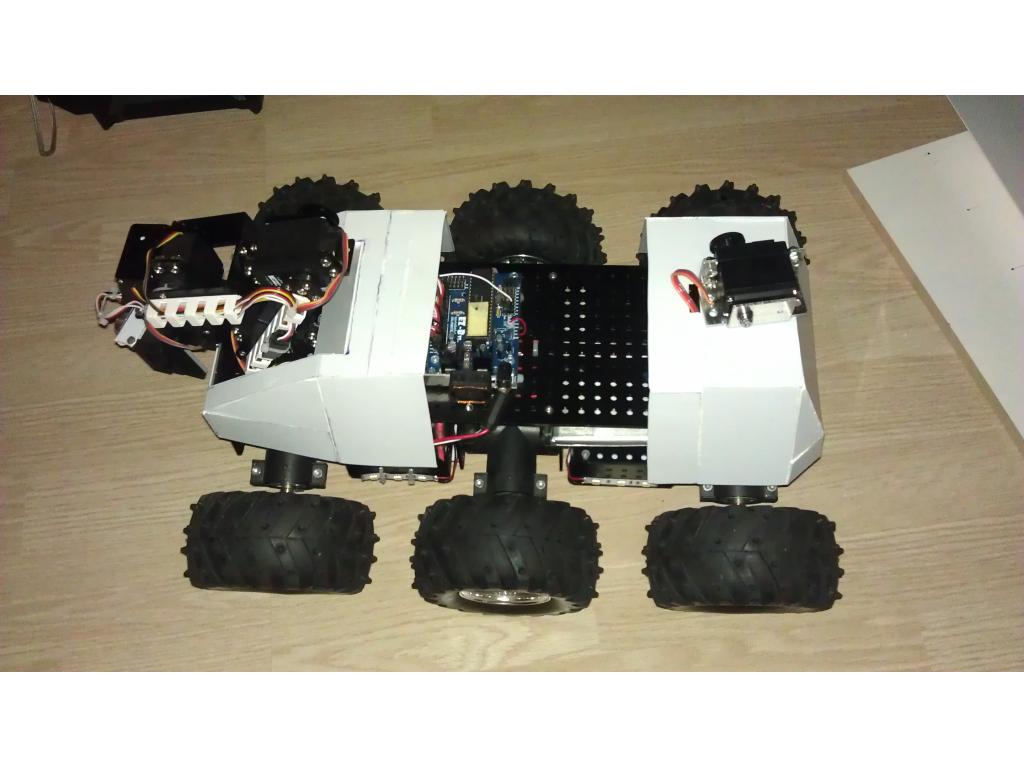













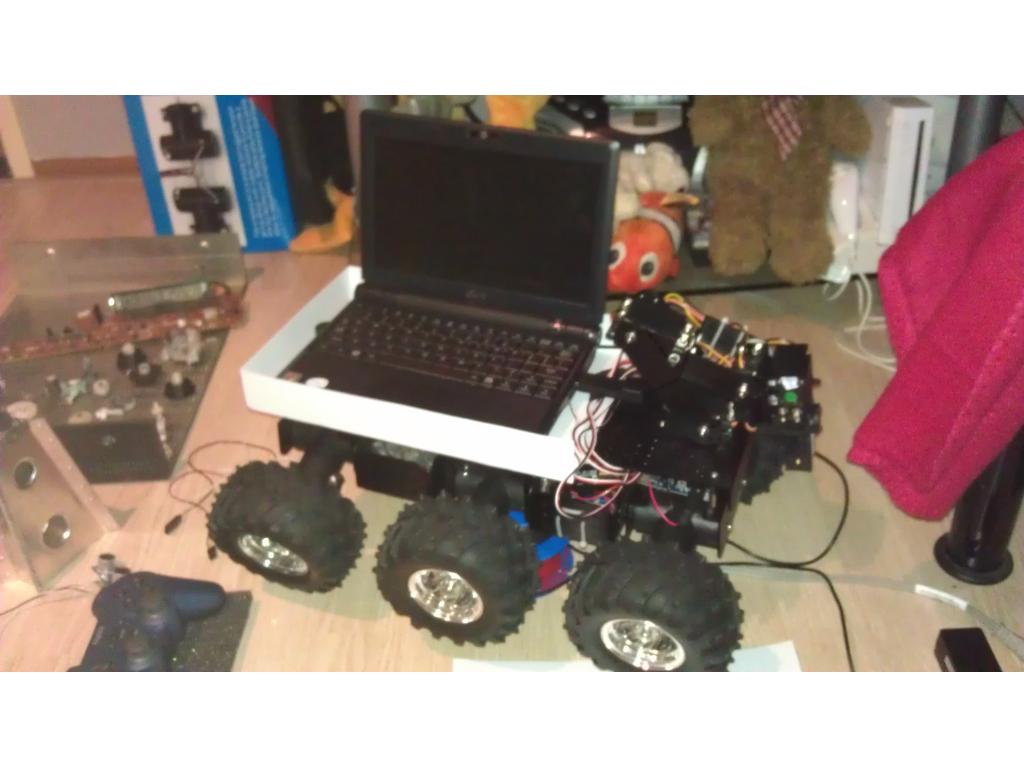
Hello fellow EZ-B'rs, As I finally discovery how to upload photos I thought it was time to share my robot with the world. It's called R.O.O.S.T.E.R which stands for: Remote Online Operating Scientific Testing Electronic Robot (took me about an hour to come up with that, but I like it).
The specs:
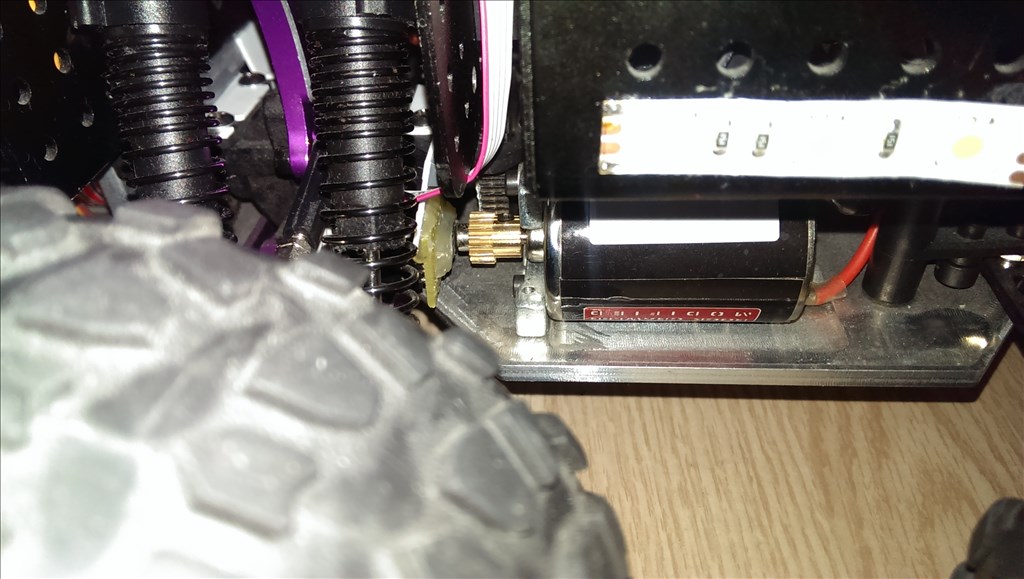
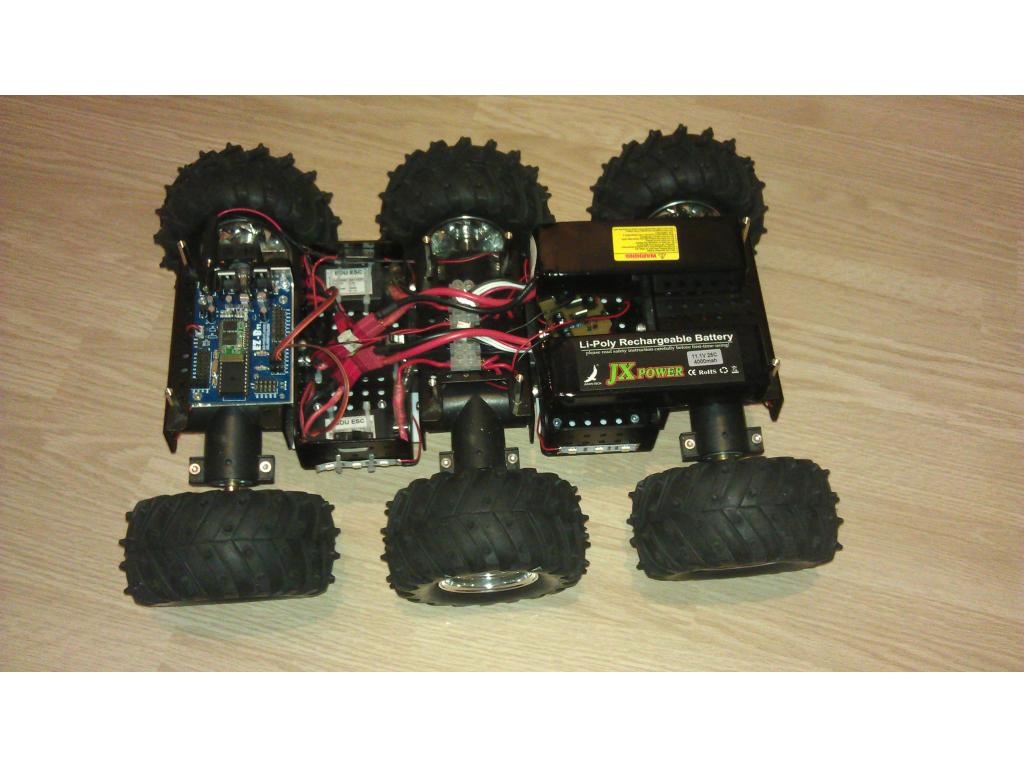
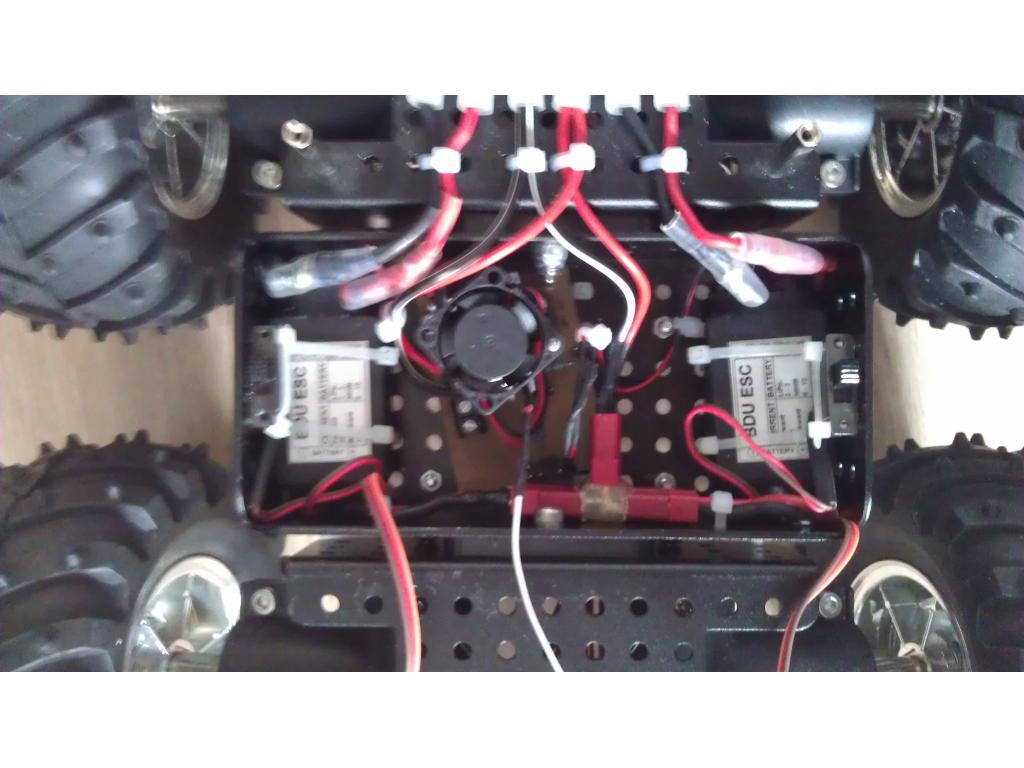
- 6x 6v 6A motors
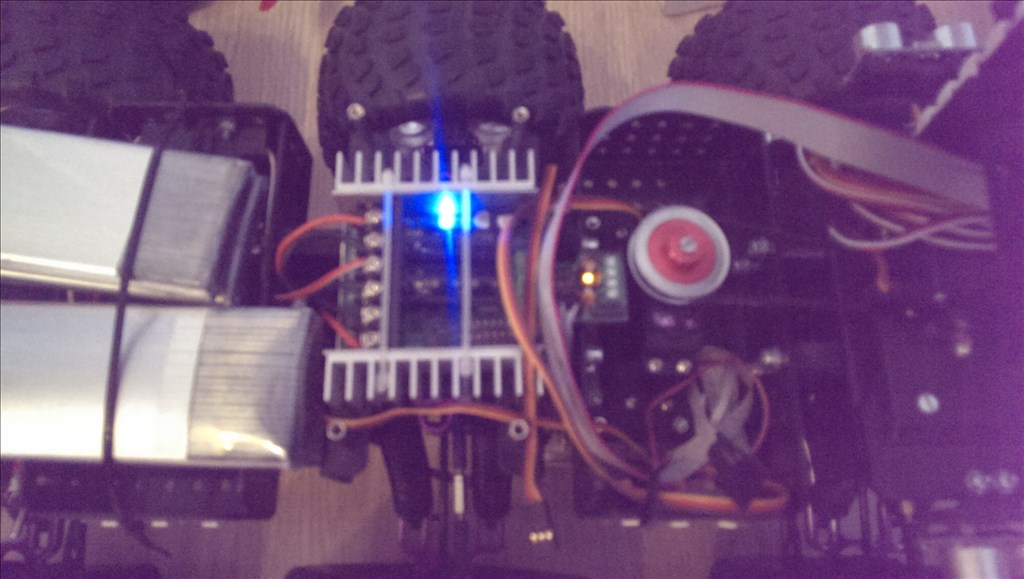
- 2x 20A Rc Car ESCs
- 2x Reddragon 2s 25c 1200mAh
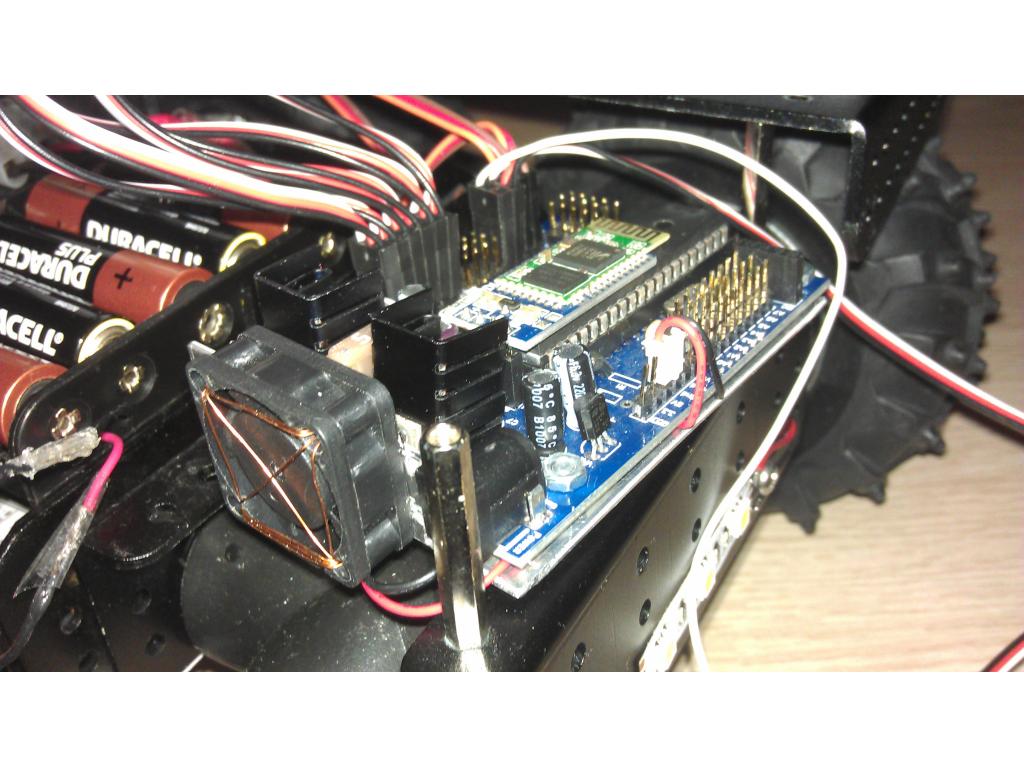
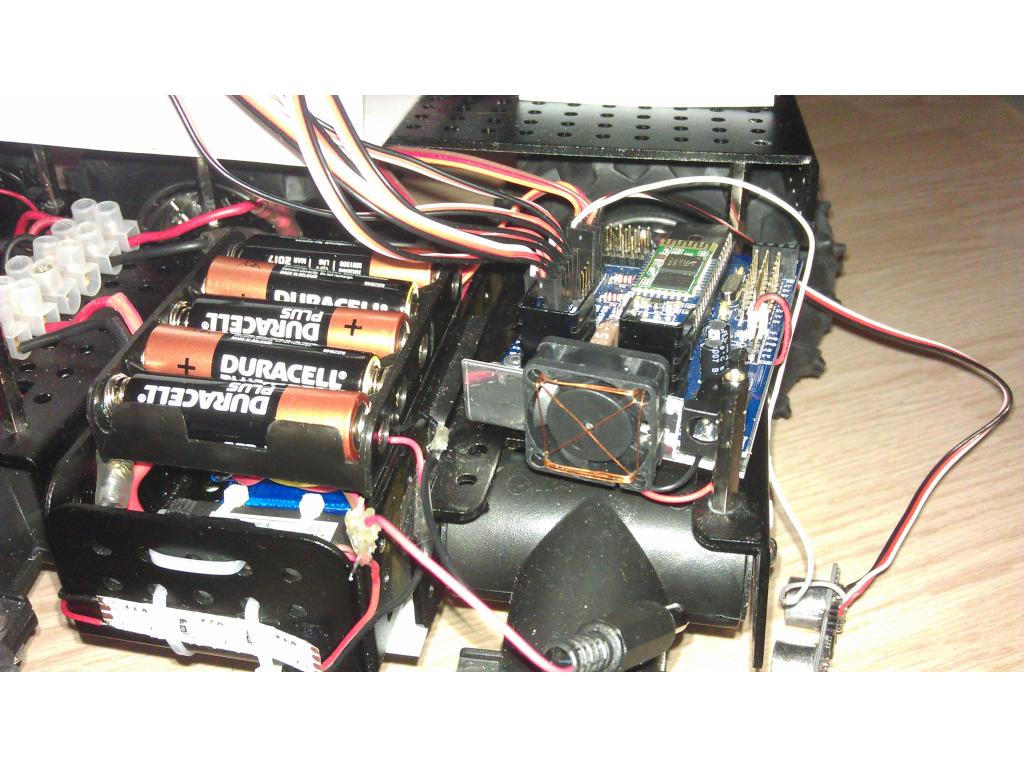
- Ofc the Ez- B
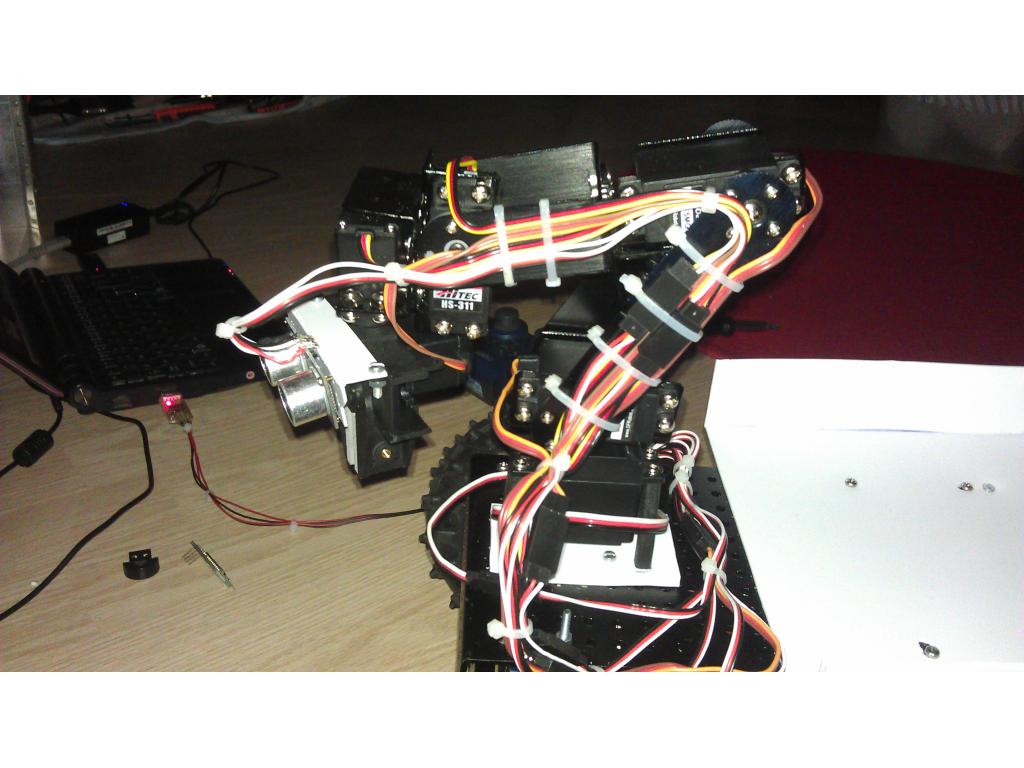
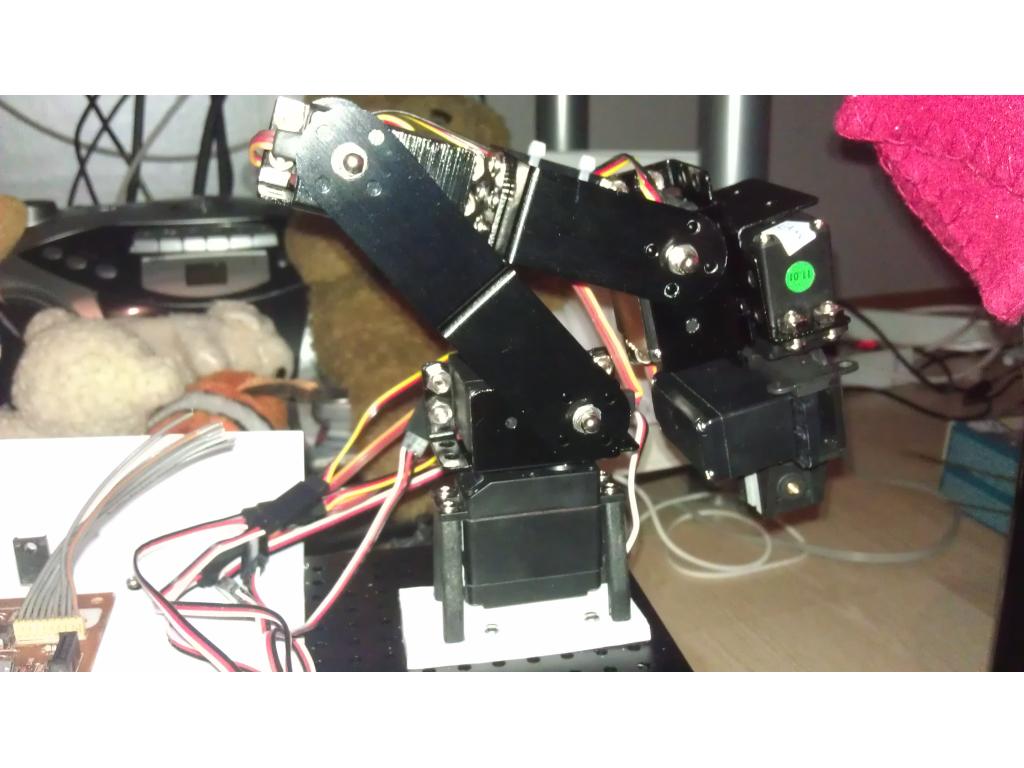
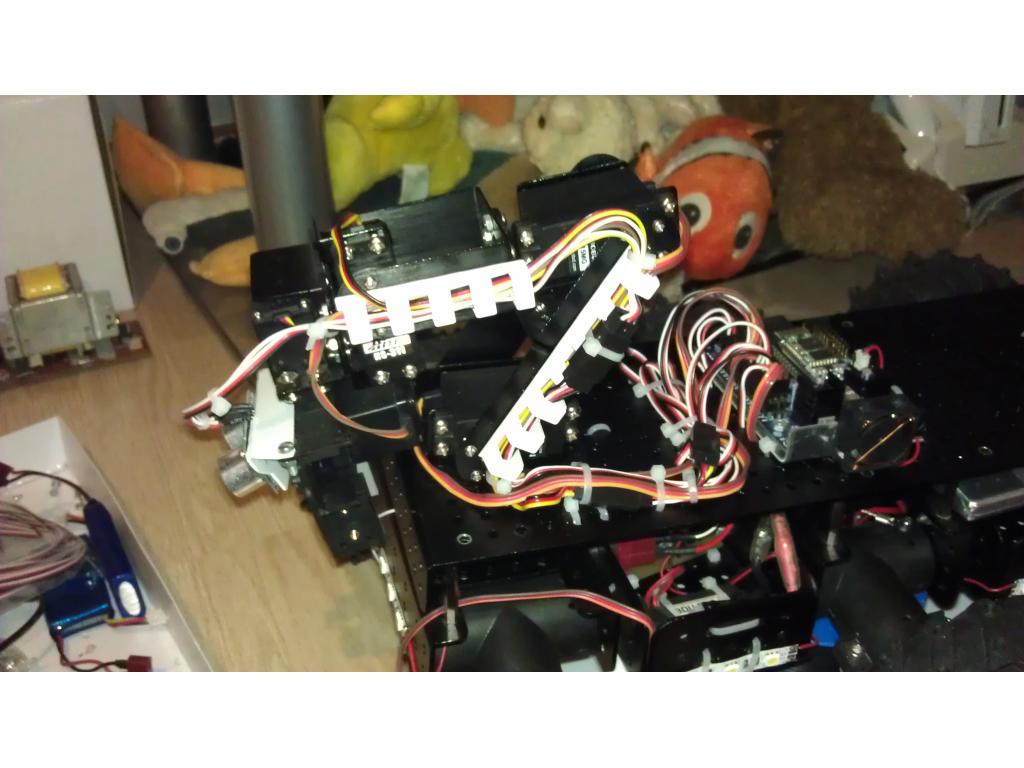
- Dfrobot 5dof robotic arm
- Asus Eee pc 900hd
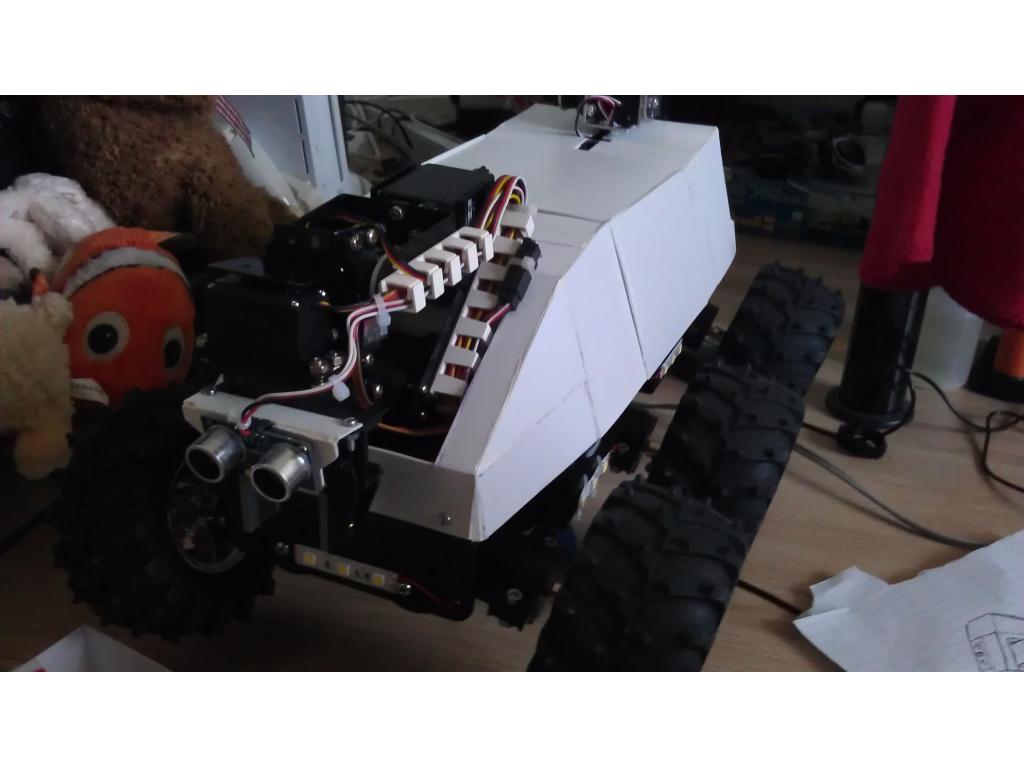
- Ping sensor (well... I sort of broke it... It got stuck between the robot and the wall...)
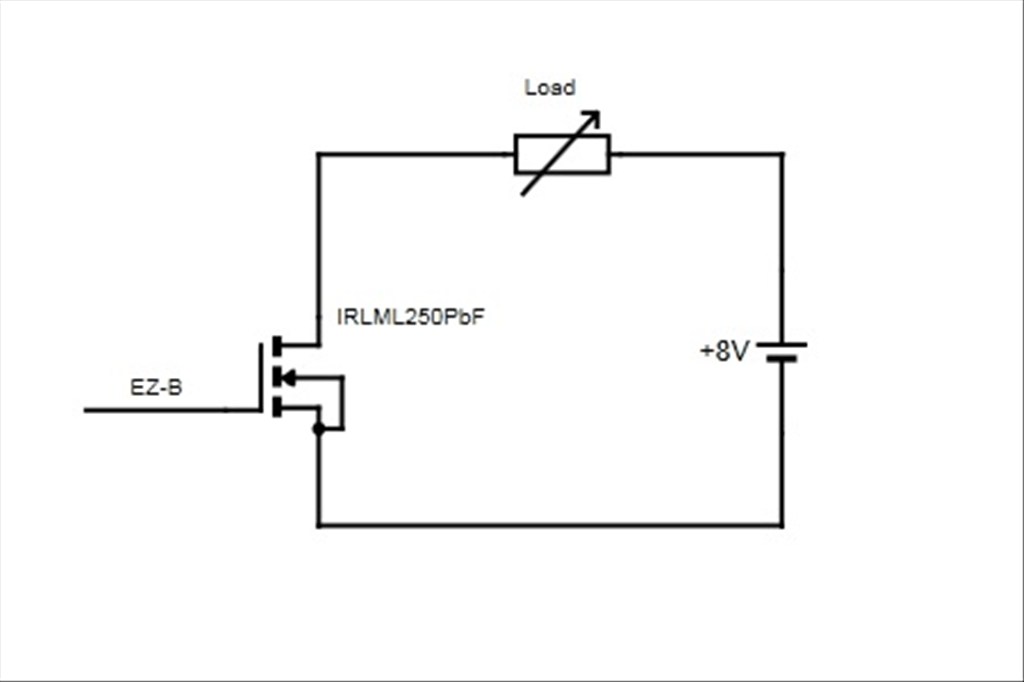
Why I'm building it? Because I can, robots are Awsome, the EZ-B rules and I got tired of burning/shocking myself when I'm testing one of my "crazy" contraptions.
Up coming updates for robot:
- A rotationplatform for the arm.
- 2 gigantic lipo batteries.
- camera+ pan/tilt turret.
- Small rockets
- mini mini-gun
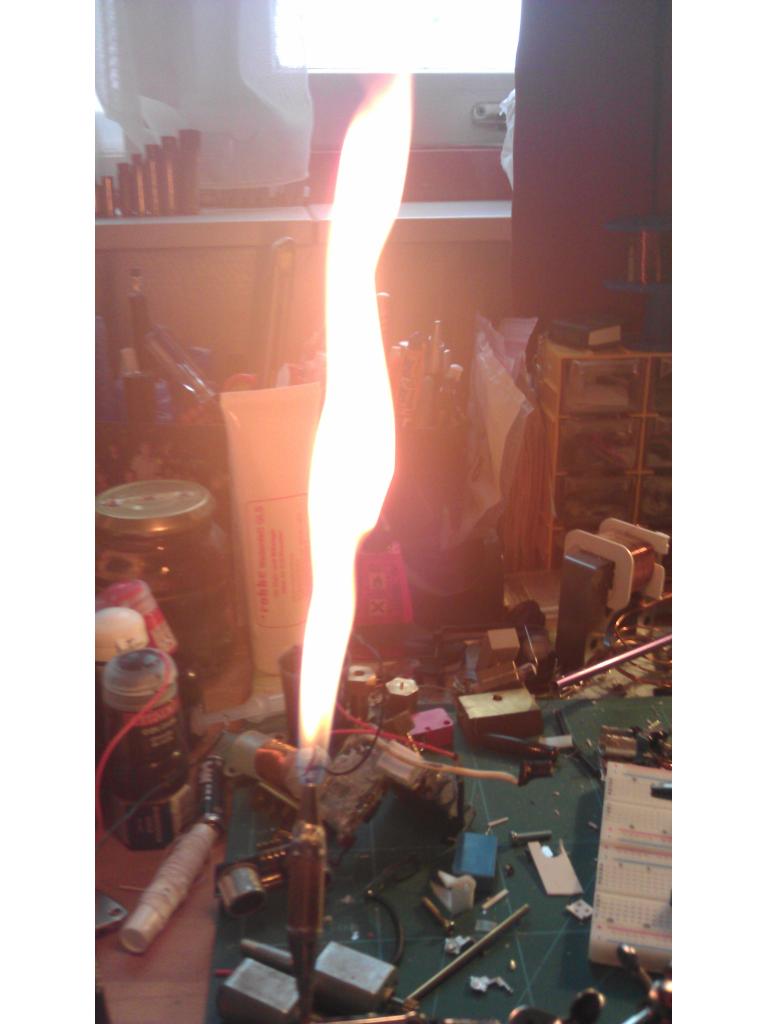
- Flamethrowler (a failed version of a liquid fueled rocket, but it's working if you call it something else)
- coilgun
- railgun
- Lots of other things I can come up with.
By budel0
— Last update
Discover more robots

Jp15sil24's 3Wheelbot
Synthiam ARC-controlled 3-wheel AdventureBot: remote and internet control, camera tilt, ultrasonic wall-avoidance,...
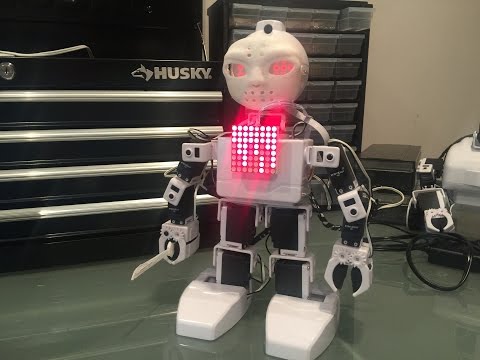
DJ's Jd's Friday The 13Th
Beware of robots on Friday the 13th-thanks to Justin for the face mask.

Lumpy's Lumpy's Omnibot(S) - Spy Vs Spy
Omnibot restoration in Spy vs Spy black/white theme with front switches retained, Mr T and Pee-wee audio, wet-sanded...

@Mohanish Well thank you, it's been my long term project and one of the prides of my home projects. I need to continue with it, it's been standing still for about 3 months now. I was having some issues with my DIY encoders, so I bought some but haven't made anything to mount it with.
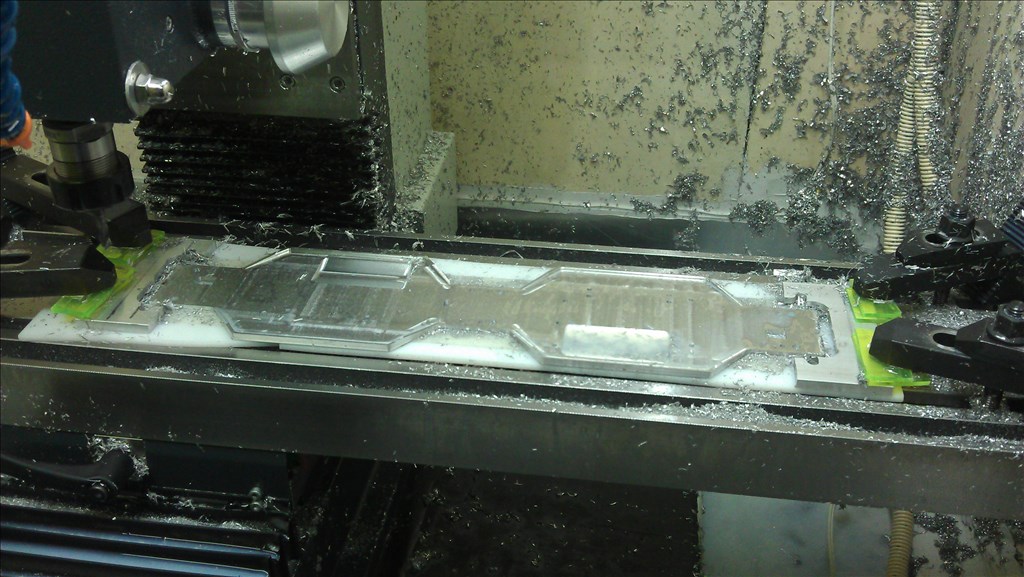
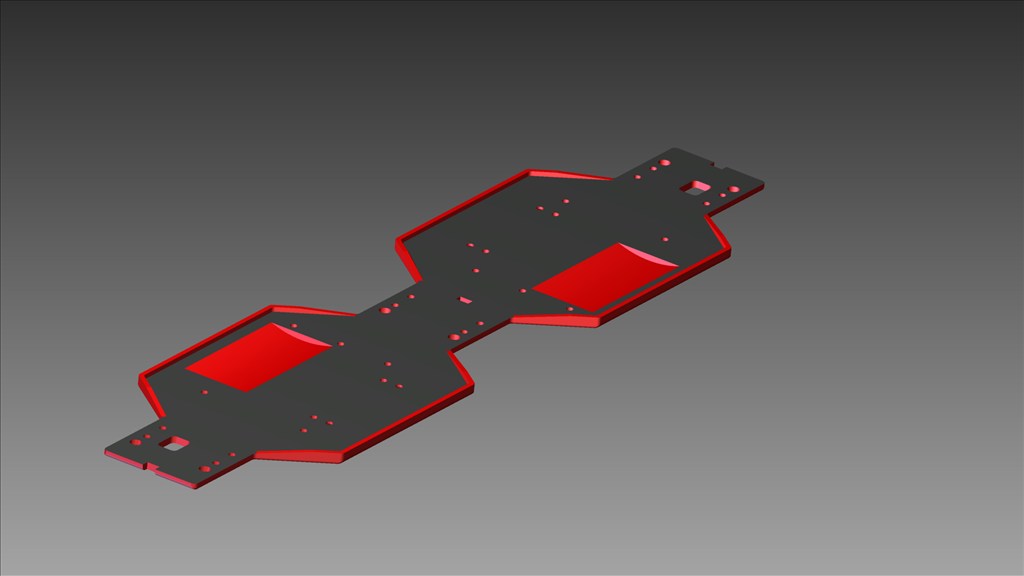
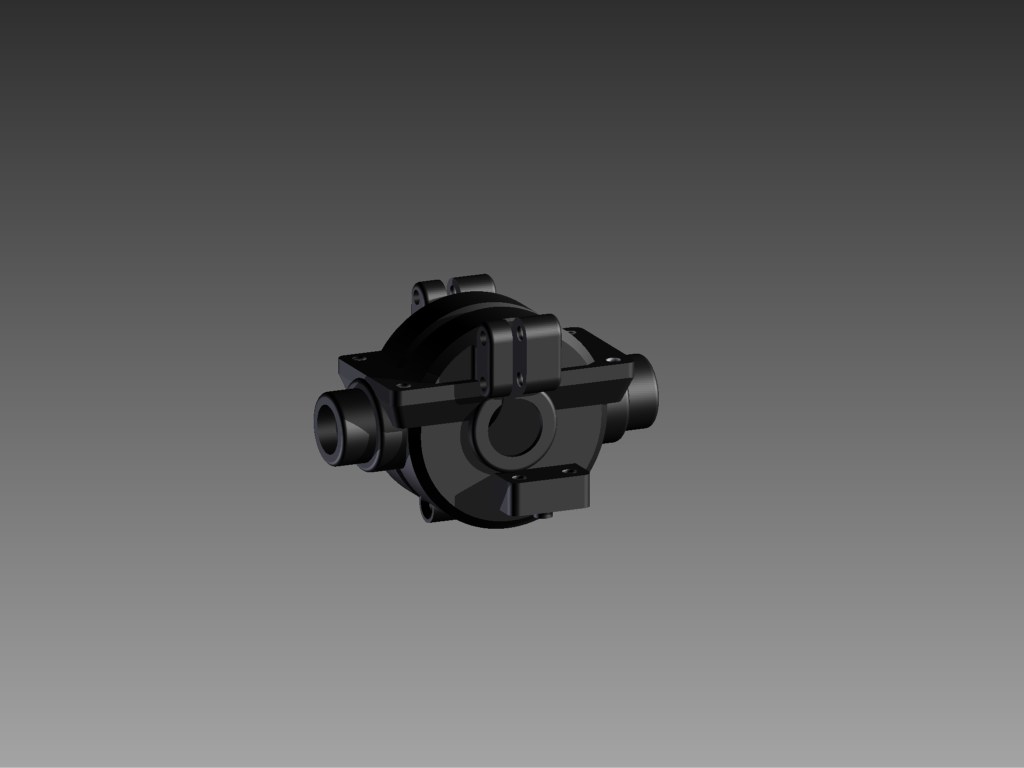
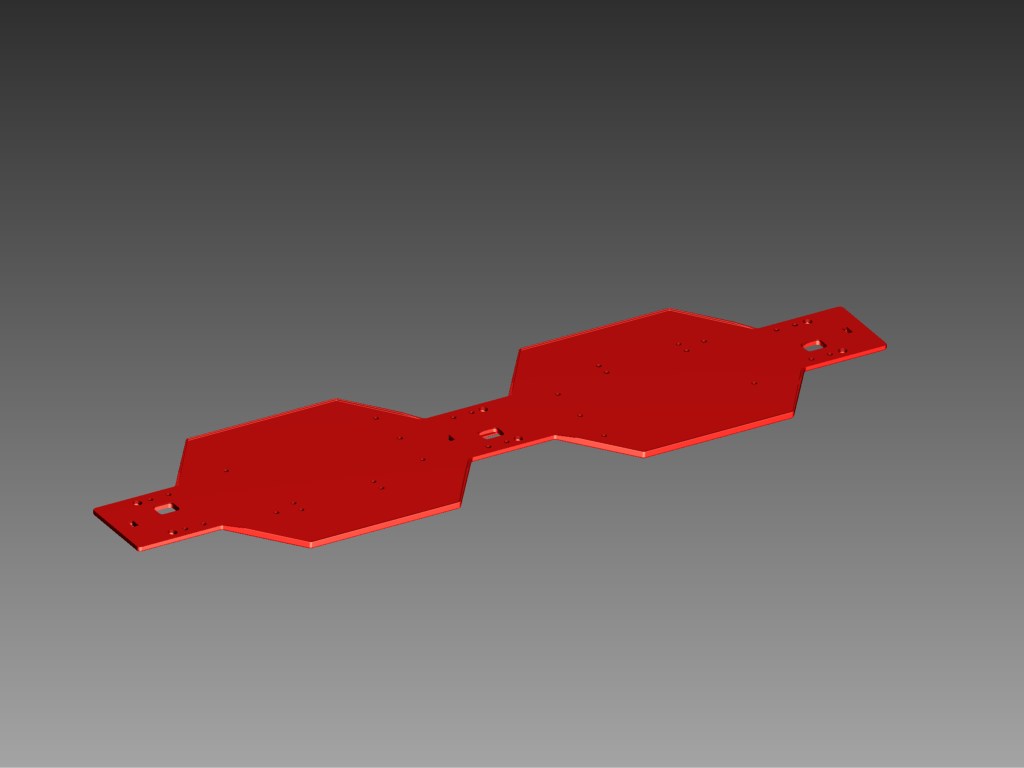
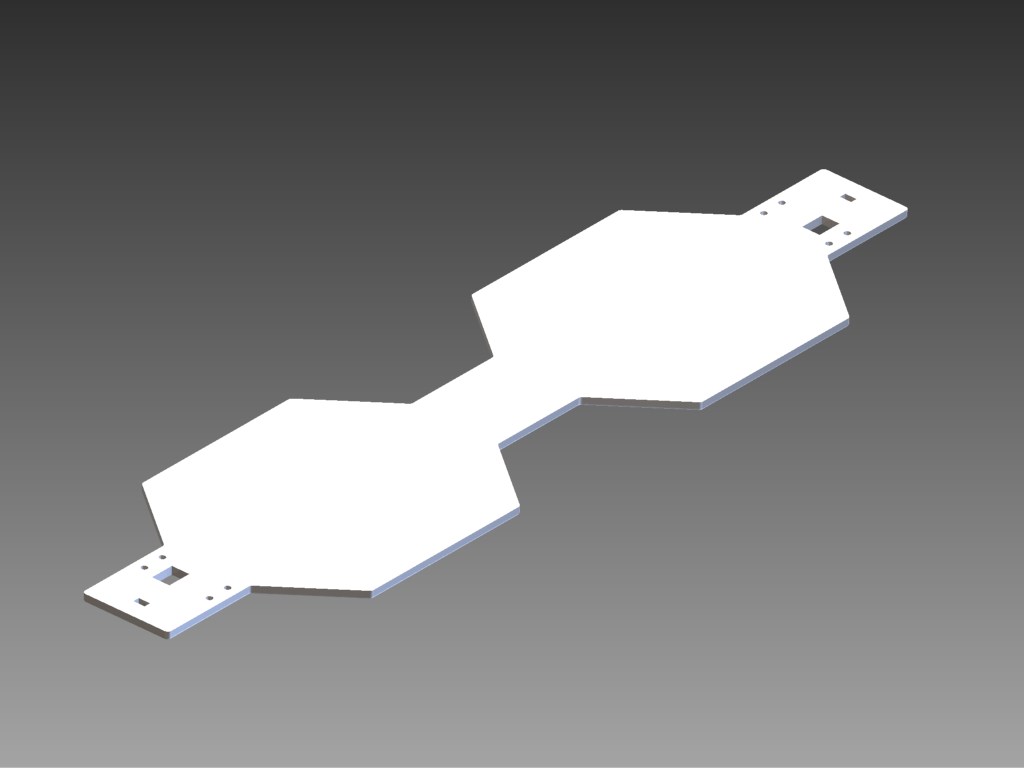
As for a BOM, it might take some time to make. I'm also going to warn you that some parts will be extremly expensive to buy if you don't have your own (CNC) mill and a lathe. For instance the frame(chassis) is milled from a slingle peice of aluminum almost 400mm long. But if you do have the equipement or acces to it, it'll be cake.
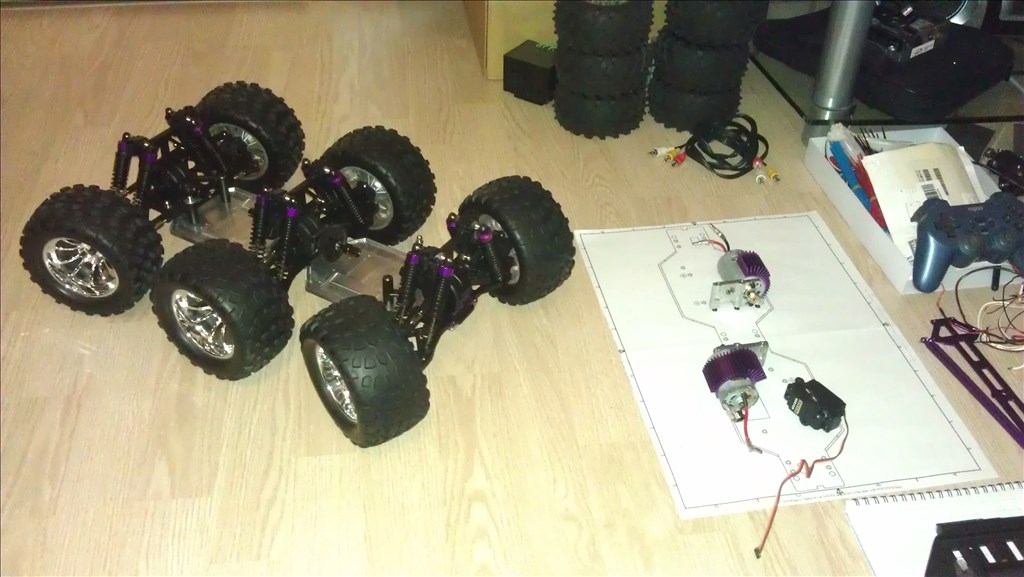
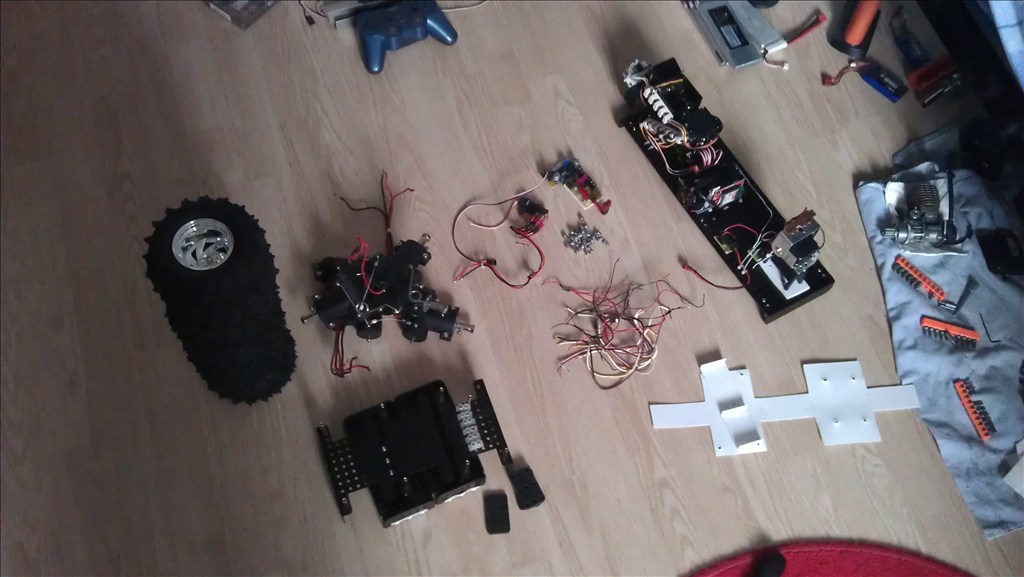
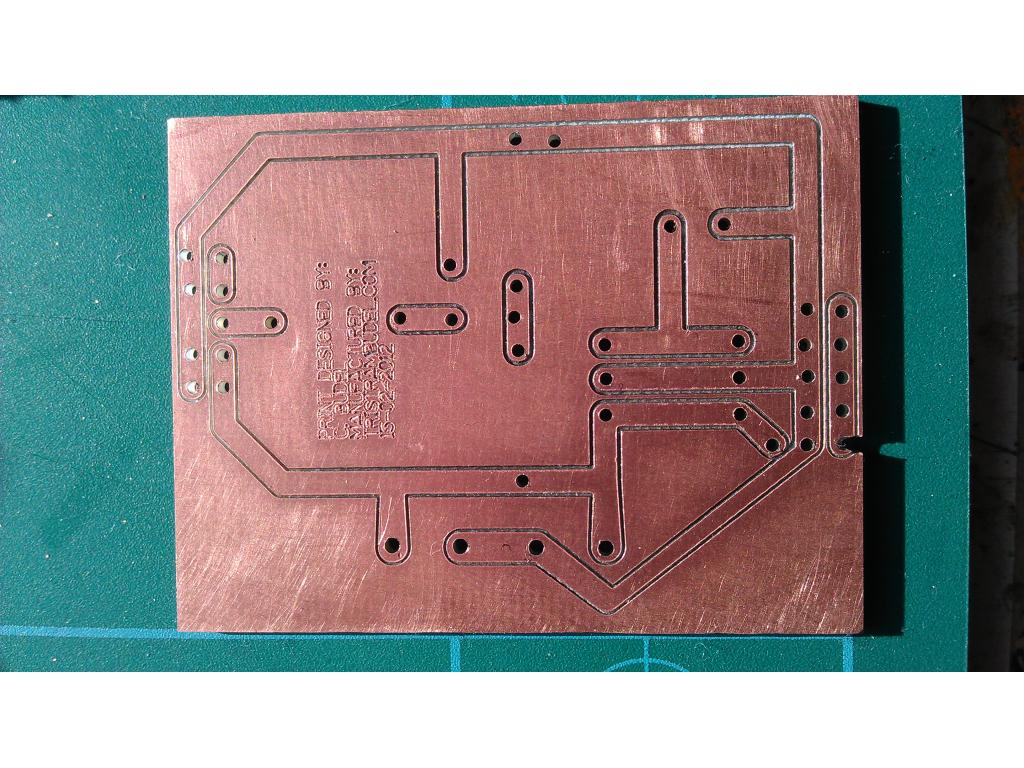
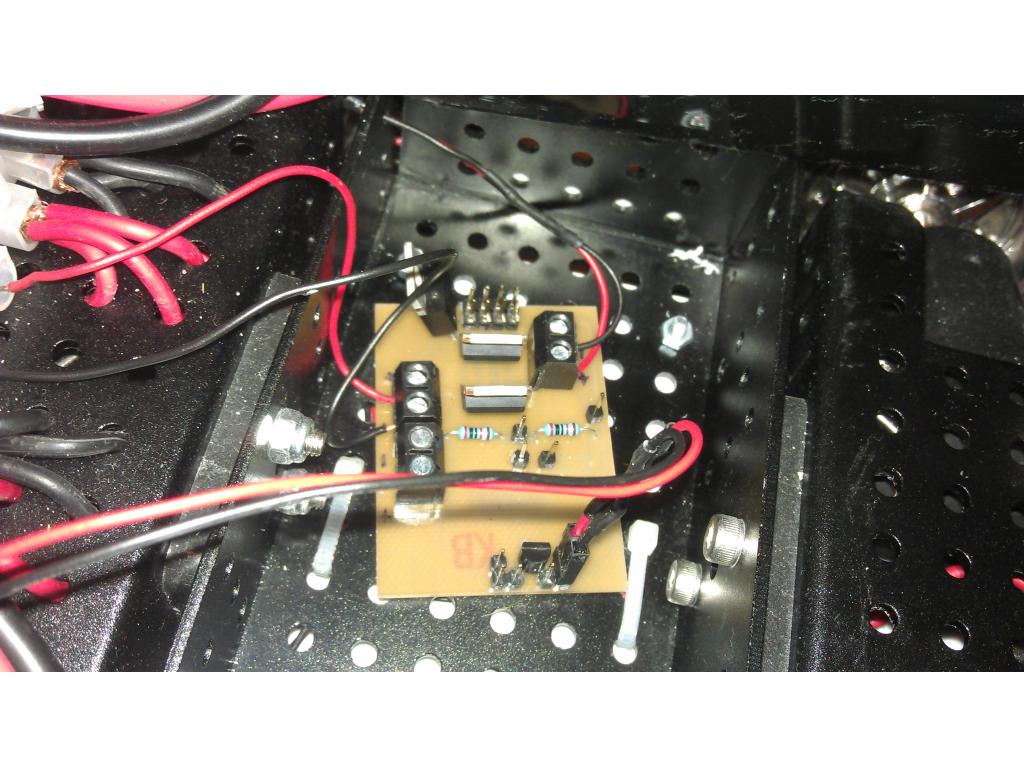
As a preview of the list of items, here's what I used: 2x HSP 1/10 monster truck 4x4 (all the drive gear for independant wheel suspension) 1x Dagu wild thumper (a frame for on top of the suspension, etc.) 1x DFrobot 5DOF robotic arm 1x EZ-b v3 (upgraded with Synapse modules for longer range, probably getting a v4 in the future, adding a cam is so much easier with that one). 1x Dimension engineering Sabertooth 2x25a 1x A whole lot of upgrade parts from HSP 1x Laser cut battery tray 2x CNC'd axles 1x CNC'd chassis 1x CNC'd other parts 1x 3D printed EZ-case 3x Lipo 2s 4000mah 25c 1x Custom electronics for lights 1x more stuff
Hmm I should continue with this project... I now also have a viable ignition for the flamethrower I made >.<. I'll probably continue with it after I've finished my "artisticle" project.
As for the BOM, maybe next week.
Cheers
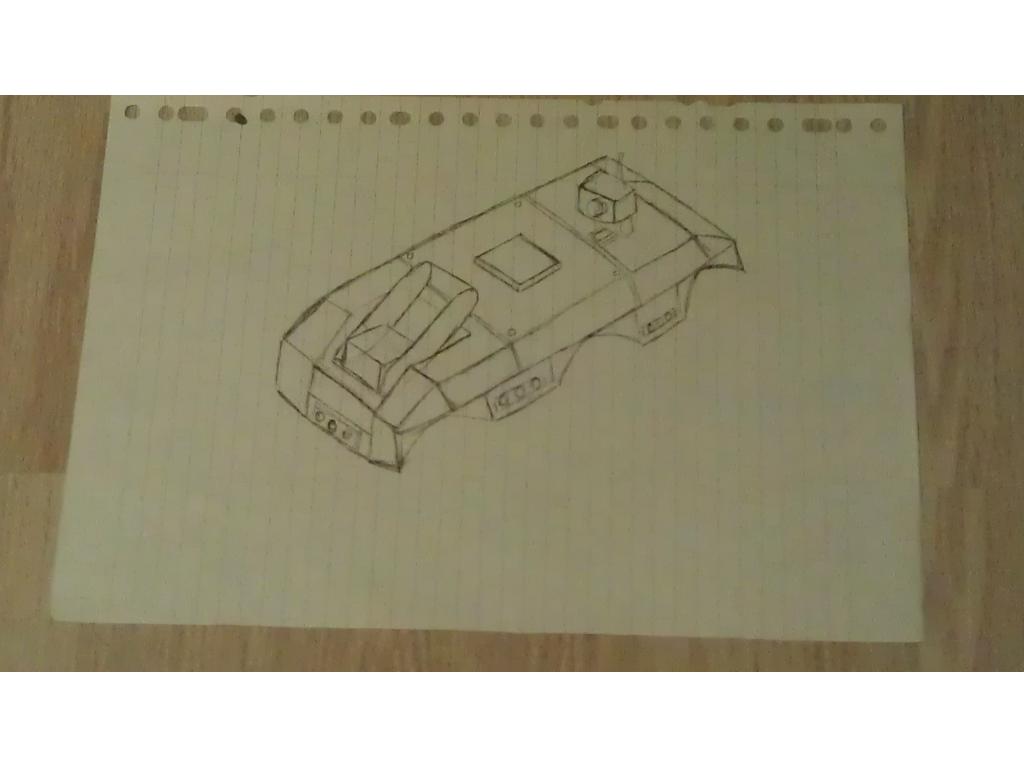
PS. A full manual, not going to happen, I might add a small exploded view as I dont have all the parts in CAD.
@budel Thanks! i'll wait for that
 but i like to tell u that i need only Electrical parts list only means what kind of motor u use which Board and what motor controller which sensors u used that only i need it other then that all mechanical parts like chassis , Brackets and suspensions system all that ill design my own i need only electrical parts list
but i like to tell u that i need only Electrical parts list only means what kind of motor u use which Board and what motor controller which sensors u used that only i need it other then that all mechanical parts like chassis , Brackets and suspensions system all that ill design my own i need only electrical parts list
So it has been almost 1 year since I actually posted progress on my robot project. I've been working on it every now and then, maybe once every few months. I spent most of my time on school, actually graduated last month and started A company. And now that I have more time I thought the moment was there, after almost 2 years of watching the revolution pass on I decided that I was going to order a v4 aswell.
And guess what, I got mine yesterday.
Luckly enough I didn't have to pay taxes cheers 70 ,- in the pocket. (for anyone who cares ((142 (EZ-b + cam) + 15 (standard customs fee) *1.12 (customs taxes))*1.21(VAT)) - 142 = about 70,-).
Future plans for the ROOSTER:
Welcome back. I'm looking forward to seeing your new progress. I remember this build. It was gong so well. Hopefully the new V4 will make the difference for you.
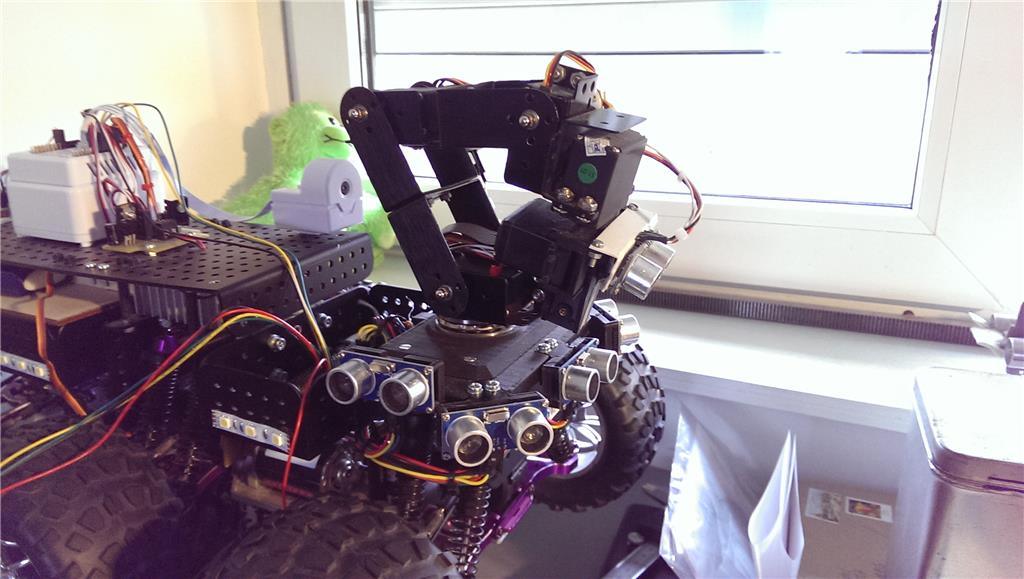
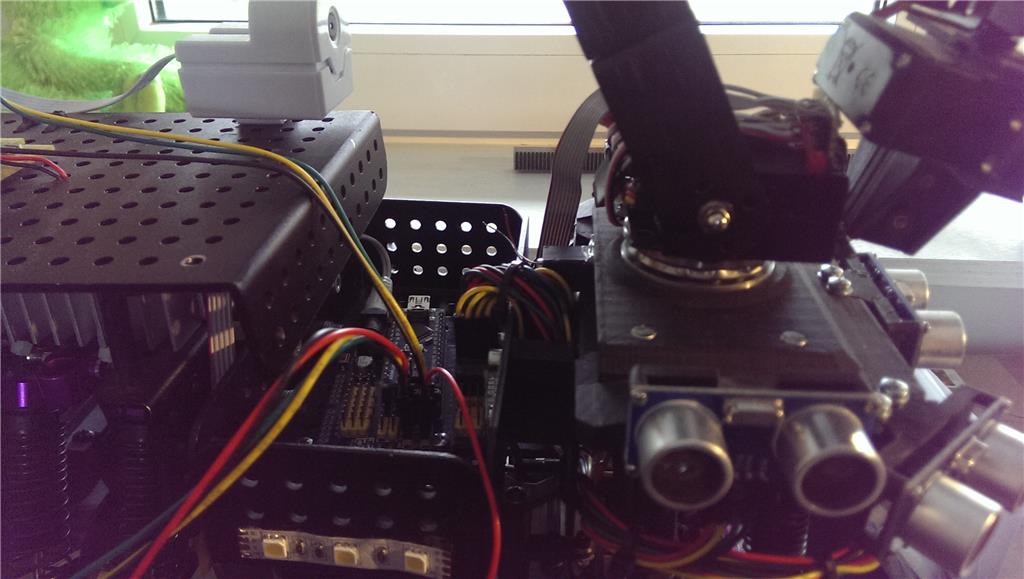
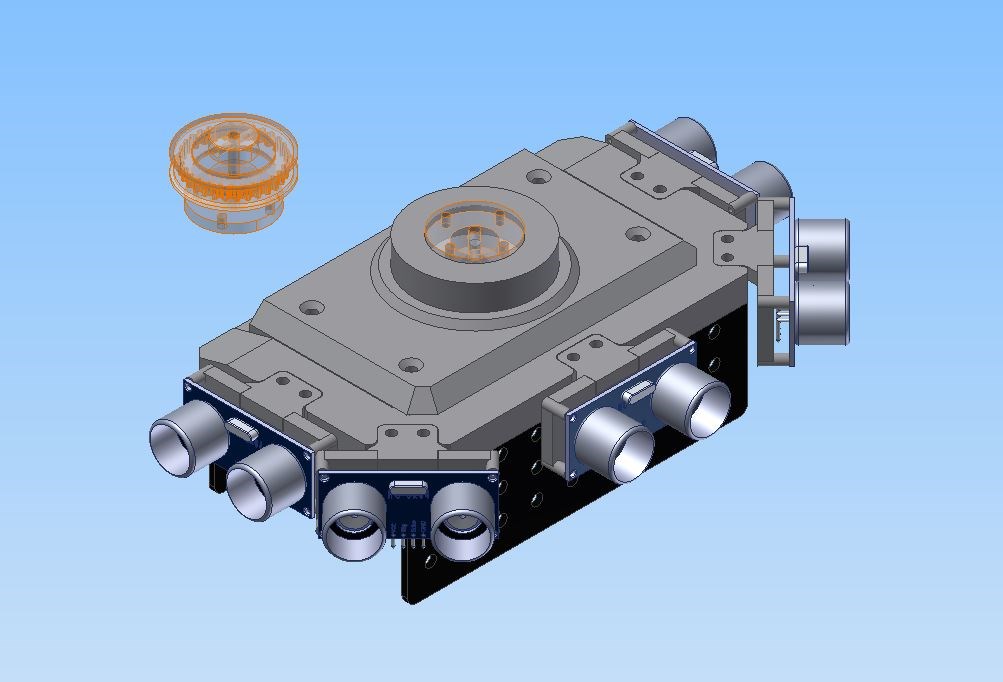
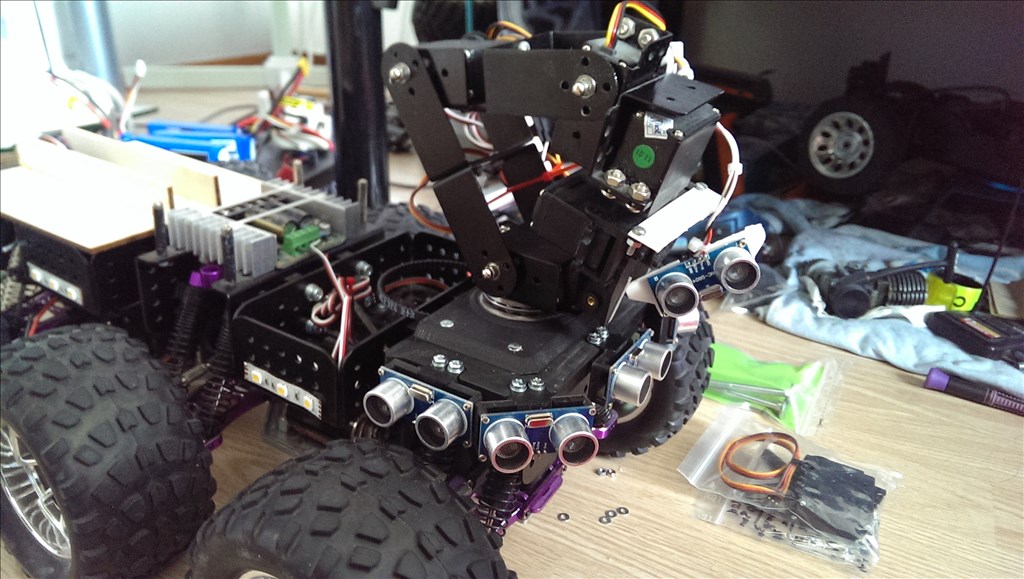
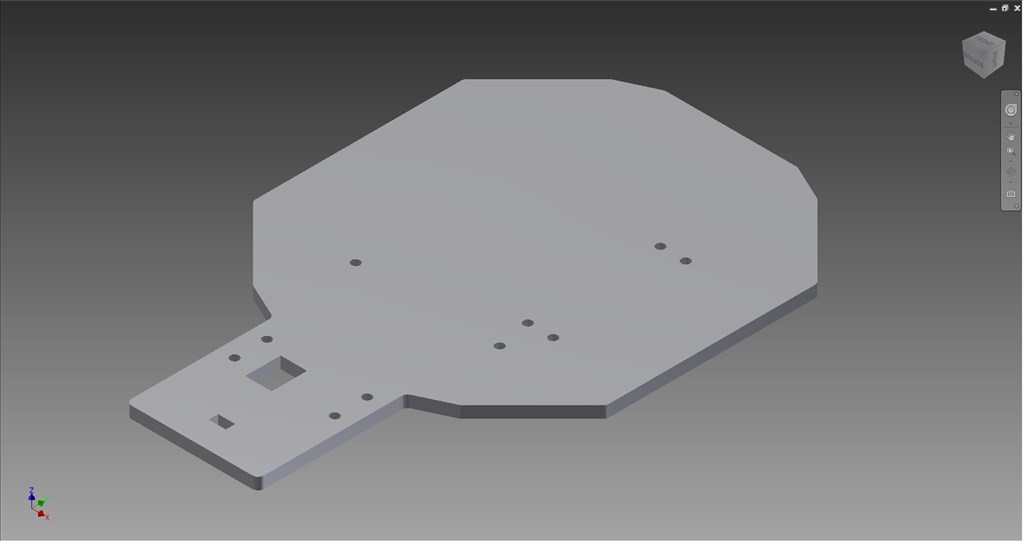
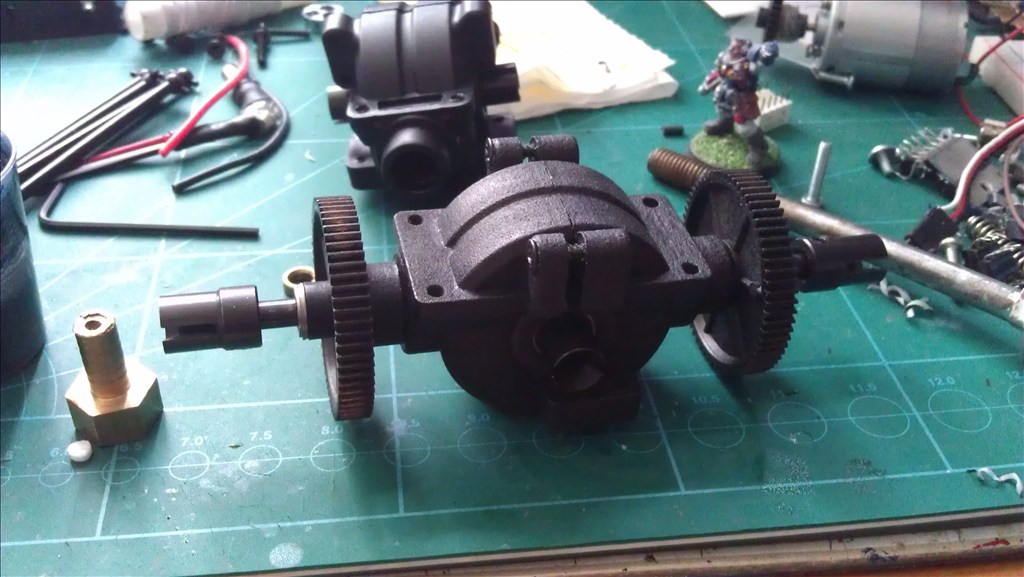
A few months later... So I had this idea to make a new rotation platform for the robotic arm. The plan was to have it as low profile as possible so it could still reach the ground. I also wanted to include a few ping sensors for range detection. I'm planning to make my robot fast and I want a "constant" stream of range detection in front of it so it wont crash.
So here's the plan: A servo powering a set of pullies which rotates an axle that rotates the arm. Everthing will have bearings to ensure smooth and rotation.
Some Inventor hours later:
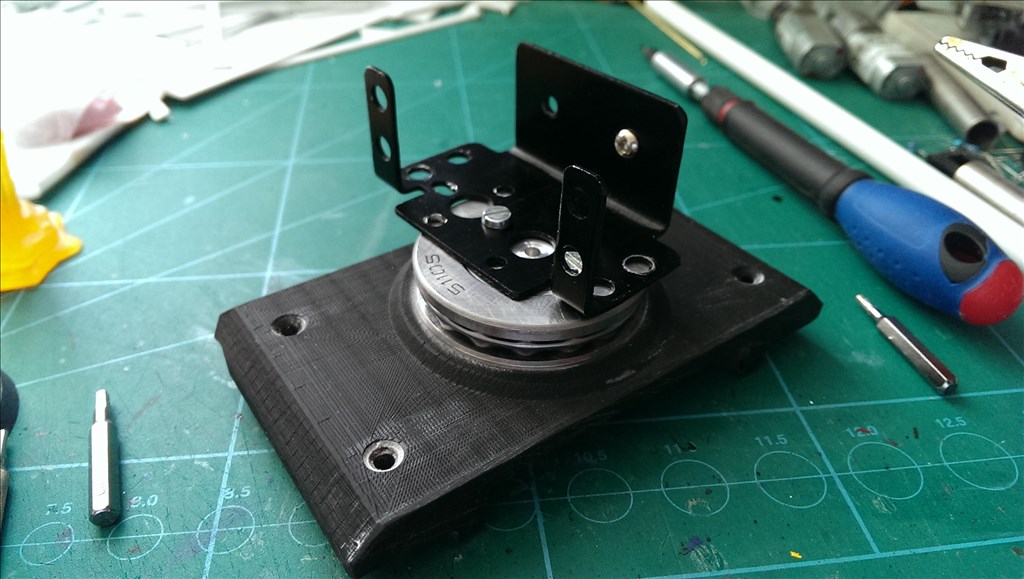
Next step was to order parts and 3D print the sensor frames, the frame for the whole and the arm. The parts took about 10 hours to print and another 2 hours to cure. I printed them on an Atum V1.5 (DLP resin printer).
Also made a tiny axle:
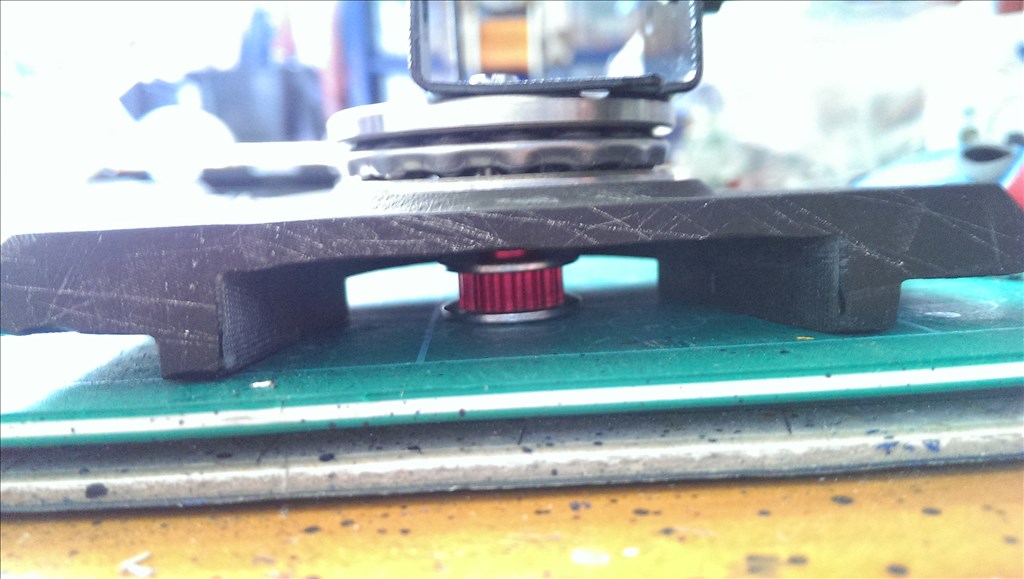
Afterwards I assembled everthing with some adjustments here and there to the printed parts(made a mesuring error on the thrusted ball bearing... Fixed that on the lathe).
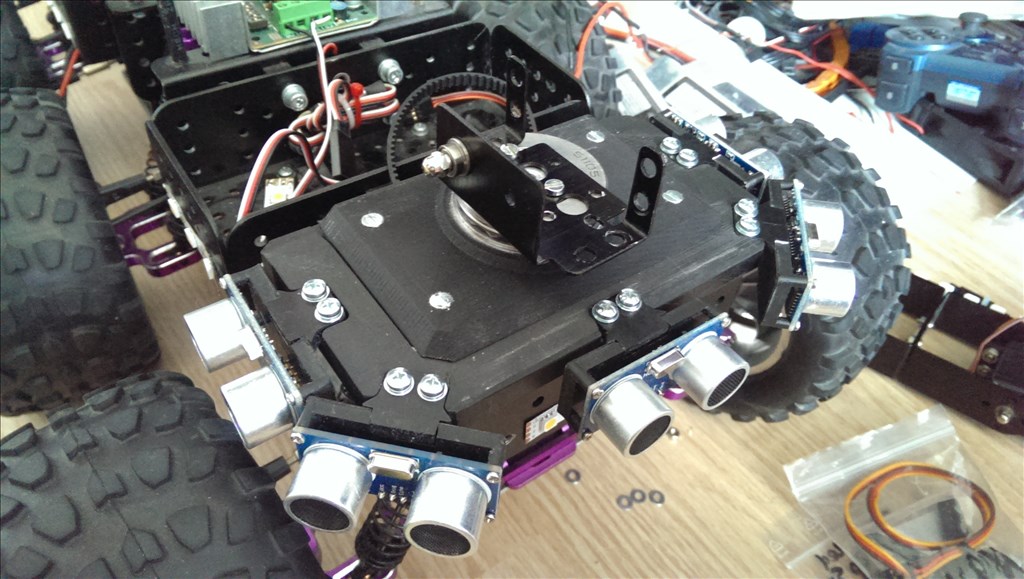
And tadaa:
Next step will be making something that connects a servo to the frame and to the remaining pulley with some kind of timing belt tensioning contraption.
Bude,
Awesome bot. I like the idea of it being able to reach the floor to pick things up. Is it moving autonomously in your room? I've never seen one move that quickly.
@ EEGbiofeedback The plan is to have it move autonomously, but it's not that far yet. I still need to finish making the encoders and apply them to the drive system. But yea, it's pretty fast. I haven't ran it at full speed inside, well not when the wheels were touching the floor. When I have everything up and running and added a gps receiver then I'll drive it outside.
Nice! Here's one I made that goes about 1/3 the speed of yours. It has 3 ping sensors continuously scanning with a tank chassis:
Looking forward to your updates,
Bill