




























































































































Now I have the EZ-B kit and the Hearoid it's time to start my Showcase thread.
I still haven't decided on a name for him yet, all suggestions are welcome.
I won this robot on ebay weeks ago, for the past 2 weeks he has been waiting for me to collect him...

Today was the day, a road trip to pick him up and bring him back to his new home...

In his new home (with Omnibot and Wall-e in the background totally unaware they are next in line to be opened up)

It wasn't long before this happened...

Now waiting to go in the dishwasher to get nice and clean.
The plan is to make him autonomous, running 24/7 (except for when he knows to go charge himself up) but will also be adding in the various image tracking options.
The only other slight modifications to be made to him are to convert the head to tilt & pan which will involve having to give him a small neck.
The head will include the camera. I haven't yet decided to fit it in one of his eyes or to make it his nose. The issue to overcome with this is the blue tint on the bubble head. The mouth will have a light or some lights in which flicker when he speaks.
The arms will be given some life with servos at the shoulder joints and the elbows provided I can get them to fit in there nicely.
Ultrasonic sensor will be in his chest, probably on a servo to give a wider view.
Original drive wheels and gearbox seem to be in very good shape so will plan to reuse those and just replace the existing motors for the modified servos if they can manage the task.
Speaker and microphone will be in the original positions - if it's not broke why fix it?
Not too big a project but enough to give me a test, help me learn and bring an old robot back to life.
Discover more robots
Tezsmith's Linking Mathematica (Computational Software...
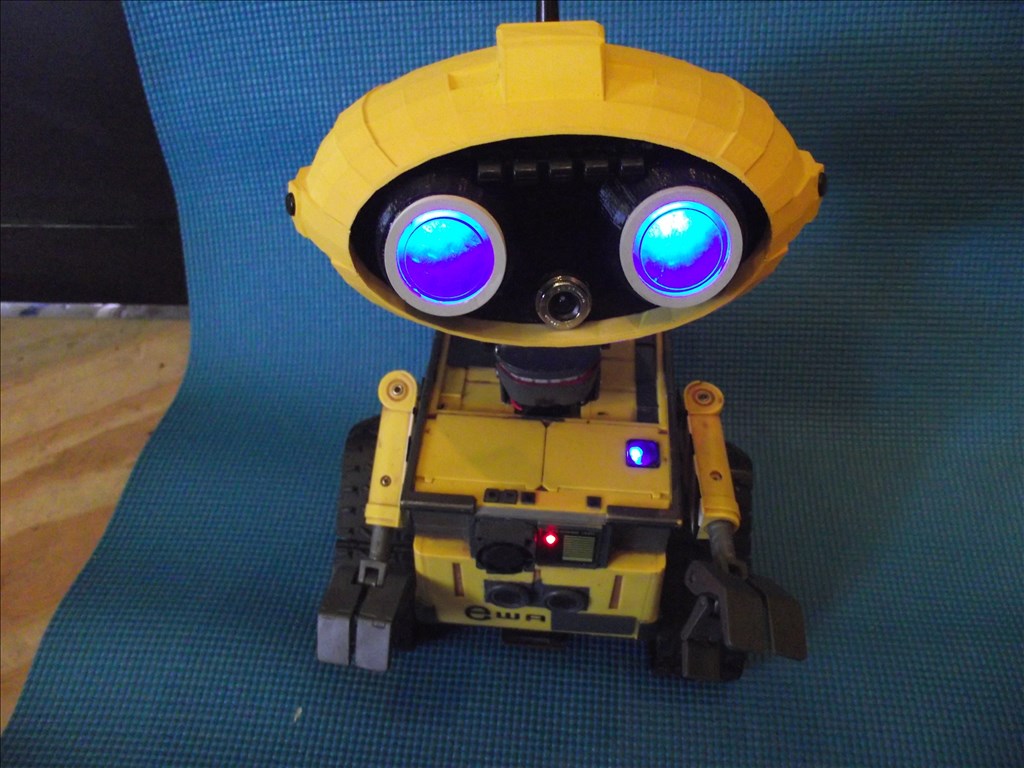
Rb550f's Meet Ewa


I don't know which one has the smoother movement, the robots elbows, or your moonwalk!
Den
Oh! A wall! Haha. Both look pretty good, the robot and the smooth moves.
I see the camera is very fuzzy why is that and will you post a better one
I see on the head only going up and back so side to side ,dont meen head rotate ,on mine i design it so go up and back rotate 180 and side to side
ON dancing its not a robot doing it,but my nephew is a very good dancer,won a few contests ,but yours still good
The robot eye view video is just out of focus, nothing a quick tweak of the lens wont cure. it's also dimly lit which is sorted with the settings in ARC but video capture doesn't capture processed video only live video.
The head pans and tilts, tilts between something like 45 & 70 (can tilt up to about 95 but that just looks wrong) and pans the full range but I've set it for 20 each way (30 & 70).
NOT about pan or tilt ,just wounding are you going add side to side head tilt
looking to set mine like a person head does ,from shoulder to shoulder tilt down i guess its 45 deg and tilt back about 15 deg and side to side i guess about 30 deg on each side
Does need a post with a ball and socket and 2 extra servos and ball and socket design i have there are other ways too ?.
maybe this one post will explain it better
No, I thought about it but it would be too much effort making it work and having a neck that's not stupidly long (I've shortened it from the video posted) or too flimsy. The head weighs quite a bit, more than I expect it would.
That's what I've tried to replicate, a human head range. It's not 100% lifelike without the tilt but it's close enough that it's not noticeable unless you look for it.
ok just curious havent tried yet on hearoid yet,soon to be another project of mine
mine head doesnt stick up much ,omnibot 2000
IF head is heavy ,see if you can remove any plastic,i do that on mine,and still not flimsy
Few other ideas i keep all servos in the body,and the shaft with the ball is the par thar rotates and the ball moves 360 every way,can hard to expain iy
but when ready if you want to look at will have it up on my omnibot 2000 project