

































































cE9s4PsOgeBQIORwjd5!~~60_1-634818020230156250.jpg)







































































































BO)Lupuc4g~~60_35-634706297915000000.jpg)
LupbT6!~~60_35-634706298769375000.jpg)





C5j!~~60_35-634655044863125000.jpg)
















C5j!~~60_35-634659603510781250.jpg)


































C5j!~~60_35-634651704046230469.jpg)






















































































































































































































































































































































































































































































































































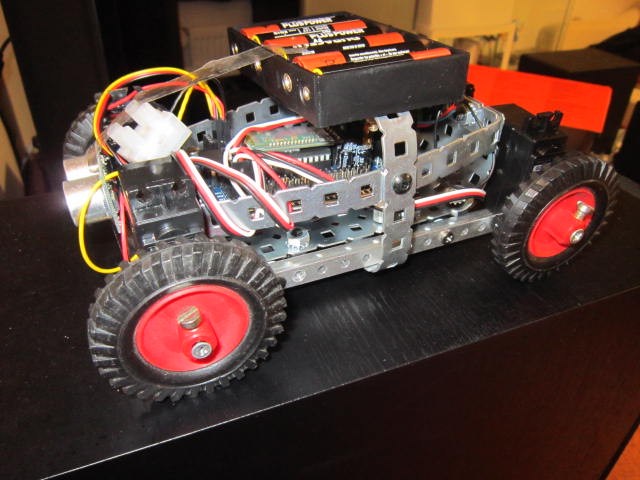
This project has evolved some , the basic rundown is I'm modding two Omnibots , one a regular the other a larger 2000 model. I will have two ezb kits , rad base idea was thrown out because of so much noise but could go back on the table if the omnibot drivetrain is too weak to pull it.





By jstarne1
— Last update
Discover more robots

Ezang's My New Talking Mr. Head Robot
Mr. Head robot with jaw movements and more to come; I will be meeting AIMLbot soon
Cosplaying's Project Mini Rover
Compact DIY robot using four continuous-rotation motors (one per wheel) with a taped distance sensor-small footprint,...
Klaatu's 1 M Hexapod (Autonomous Insect)
Autonomous 1m hexapod with EZ-B V4-2, 18 servos, LiPo power and Synthiam Blockly control for garden navigation,...

Ok I used permatex CA glue liberally around the edges of the door , I had to assert constant pressure to align it as closely as possible because it really does not line up right while on the mounts it came with. I scuffed it with 80 grit sandpaper and applied one layer of body filler , I will scuff this layer and do one more. Once it cures I will start drilling the holes for sensors ect.
While I was waiting for this Bondo to fully harden enough to sand I vented the area over each motor in the gearbox. 40mm 12v fans , they will pull hot air away
Ok I started placing ultrasonic sensors , one radar up front , a backup sonar distance sensor, a depth perception sonar in above the camera. I'm thinking about placing one faced up so it can detect doorways , or if its outside or something directly overhead like a table. I believe I will have 4 IR cliff sensors . I have one pyro sensor in the chest and and plan to add two light sensors , one on top of the head other forward facing , maybe on omnibots face. Here are update pics of the three sensors I did in the last hour...
Next step , mount sonar upward maybe , mount the IR sensors , mount two light sensors , drill out holes for led illuminators in the head. 4 white running lights on the front of the base.
Wow dude, you are making some major progress! I got my motor controller yesterday but haven't had time to work on him yet. Hopefully this week.
Ok update since I had some sleep... I used led holders and mounted 4 accross the base as sort of headlights. The head has a top sonar so it knows if it is under something like a table but edge would be too high up. Also I added led holders on the ears of the head forward facing as well. I gave him some deep blue eyes and there's a sonar for depth perception between the eyes so robo can determine range of the object its following.
@brett. Thanks man! Regardless this project feels endless lol , I'm just trying to get the body ready for paint and ill cross my fingers I can get it to my painter tommorow.
Tiny update: the stainless steel led holders work so well I bought 8 more , they were 7.50 after tax from radioshack. I'm adding more to the "ears" on omnibots head so it has light in the direction of the camera. Also I was thinking of one led on each side of the power management panel. I must cur a square hole for the female USB plug so I can plug in.the 4g antenna later. Also I must find the Asus WiFi antennas I have laying around and glue them into the body. Specs say they should be 8 to 16 cm apart and exposed to open air which means they must be on the exterior for best performance. I must trim off his neck because he will have a lynxmotion pan tilt bracket installed there. At this time I am thinking of naming this robot Jarvis , from iron man. It feels appropriate since this is my rendition of what tony Starks personal omnibot 2000 would look like.
i made awhile back a tracking WIFI antenna ,kinda like the ASUS you have but on a servo and field strength meter to adjust the servo on your head i am using a single sonar for many reason,one is only 1 hole ,second is very low current,and third better range and accuracy use it to set the distance of the person and have it adjust the focus on camera,and adding person detector (PIR) because the ultrasonic will pick up other things too,but if no person will focus on a object and adjust the camera,also LDR comes in handy for turning on or adjusting lights if gets dark or going in a dark room,made many LDR circuits ,works by measuring LUX (light level),one of the most common sensors for light is a photocell