

































































cE9s4PsOgeBQIORwjd5!~~60_1-634818020230156250.jpg)







































































































BO)Lupuc4g~~60_35-634706297915000000.jpg)
LupbT6!~~60_35-634706298769375000.jpg)





C5j!~~60_35-634655044863125000.jpg)
















C5j!~~60_35-634659603510781250.jpg)


































C5j!~~60_35-634651704046230469.jpg)






















































































































































































































































































































































































































































































































































This project has evolved some , the basic rundown is I'm modding two Omnibots , one a regular the other a larger 2000 model. I will have two ezb kits , rad base idea was thrown out because of so much noise but could go back on the table if the omnibot drivetrain is too weak to pull it.





By jstarne1
— Last update
Discover more robots
DJ's Robot Head
Develop a humanoid head with Synthiam ARC, adding new features to support head functions for a humanoid-type platform.

Kenny's Radio Shack Robie Meets Roomba
Convert a vintage 1984 Radio Shack Robie into a Roomba-mounted retro cleaning robot with ez-b, camera, and custom arms.
Rgordon's Magnus The 6 Ft Robot
Magnus: a 6 ft, 300 lb humanoid using wheelchair motors to drive tank treads; builder exploring E Z Robot kit and...

Yea photocell (light dependant resistor) I will mount most likely in the chest maybe one in the head as well. The sr04 seems to be the most commonly used sonar range finder plus Brett donated on.to the project so that's why I went with those.
I'm thinking of placing the ldr above the motion detector. Also I believe I will drill out two holes on each side of the power management panel as well.
that one i am using,using a much better one and using a tiny hole LDR stands Light Dependant Resistor as you can see i like very high accuracy sensors,has better navigation like maxsonar,better light detect and adjust like a LUX meter,then a good person detector not just motion only i love using and designing will all types of sensor i know almost every kind made or have most of them at work called the SENSOR MAN thre is a very cool sensor they came out will smell sensor or (NOSE DETECTOR) waiting on on the price to drop right now $400 anyone has any questions on how to use them or what type is good or a circuit design i am the guy on photocell great place i see is the volume is ,dont really need another one in head ,should be ok
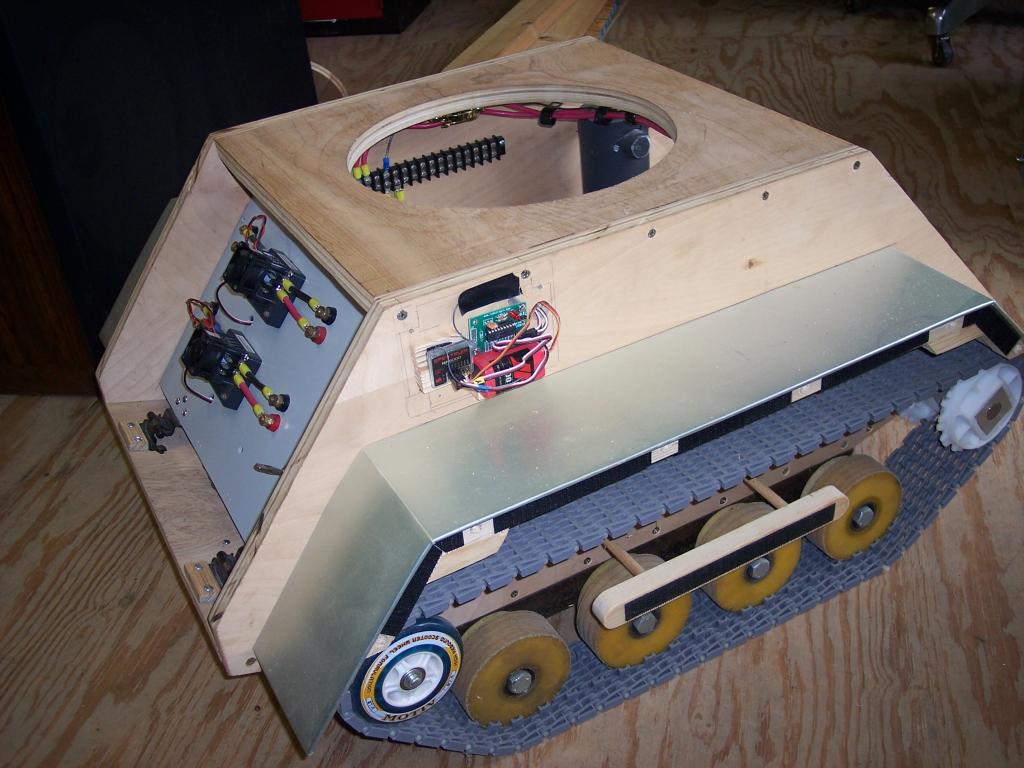
cliff sensors placement - I installed 4 IR sharp sensors to detect stairs and various types of flooring , hardwood vs carpet for example. Because these must be removed for paint process I predrilled wiring holes and mounting holes.
@jstarne ,i ask other companies about using 12 to 24 volt PSU adapter ,they say its not the best one for 12 volt gel cell batteries,BUT will still kinda ok they shut off at 11 volts and 25 volts with a over,under protection circuit,so you battery will work but wont last very long best solution is 6-24 volt PSU ,also boost converter or use a higher voltage battery so with your can put two 12 volt in series and tap off 24 volt line and 12 volts for the dc-dc converters ,still will have the same current output (wattage) of the battery ,looking to make a post soon on using DC-DC conveter and PSU adapters,since i design them and know the most on using them
se you almost done and ready for the paint,i am looking at posting info up soon on my OMNIBOT 2000 design
6 to 24v is what I have
great,i thought you said before is was 12 to 24 volt 300 PSU I see now M4 PSU you are using thats one i posted that was perfect for your design on my ROOMBA project i picked the small 12 PSU adapter and since the battery on roomba is 17 volts using a 12 volt regulator,a perfect match
also looking at making a post for how to make any computers much faster without changing CPU ,mostly get rid of memory resources ,un needed programs,trimming programs ,over clocking, and other stuff to make a compter designed only for robots
Ah , well you see the Asus mono I have and the 25 watt 2.2 GHz dual core , take a look at it for me
@jstarne mostly its software and removing programs, on boards only overclocking with a 2.2 ghz dual core you can get with overclocking almost 3ghz but will need to do temperature testing or there is extreme overclocking ,but will a very good C02 cooling system or mini compressor type cooling system or waterjacket design, i have done one before ,but draws many amps so 3ghz is a good overclock for robots