

































































cE9s4PsOgeBQIORwjd5!~~60_1-634818020230156250.jpg)







































































































BO)Lupuc4g~~60_35-634706297915000000.jpg)
LupbT6!~~60_35-634706298769375000.jpg)





C5j!~~60_35-634655044863125000.jpg)
















C5j!~~60_35-634659603510781250.jpg)


































C5j!~~60_35-634651704046230469.jpg)






















































































































































































































































































































































































































































































































































This project has evolved some , the basic rundown is I'm modding two Omnibots , one a regular the other a larger 2000 model. I will have two ezb kits , rad base idea was thrown out because of so much noise but could go back on the table if the omnibot drivetrain is too weak to pull it.





By jstarne1
— Last update
Discover more robots
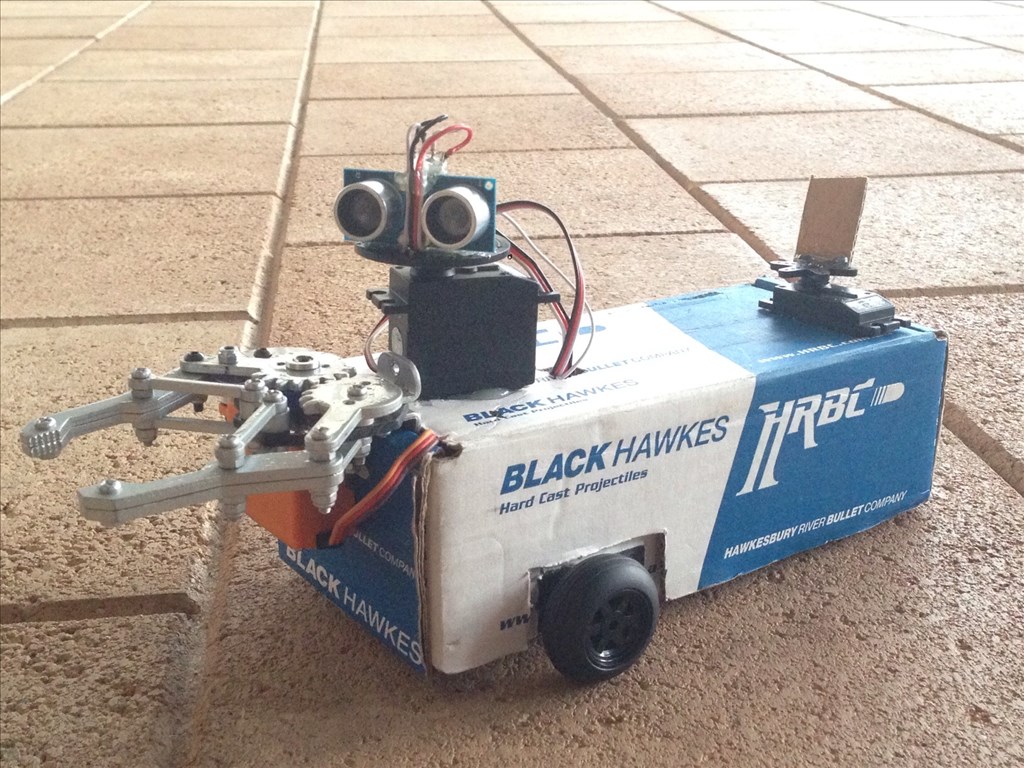
Fattywoo002's My First Bot - Dodgy Casebot
Build a Dodgy Casebot with EZ-B and EZ-Builder: 5 servos, gripper, sonar, random personality, Wii/keyboard & voice...
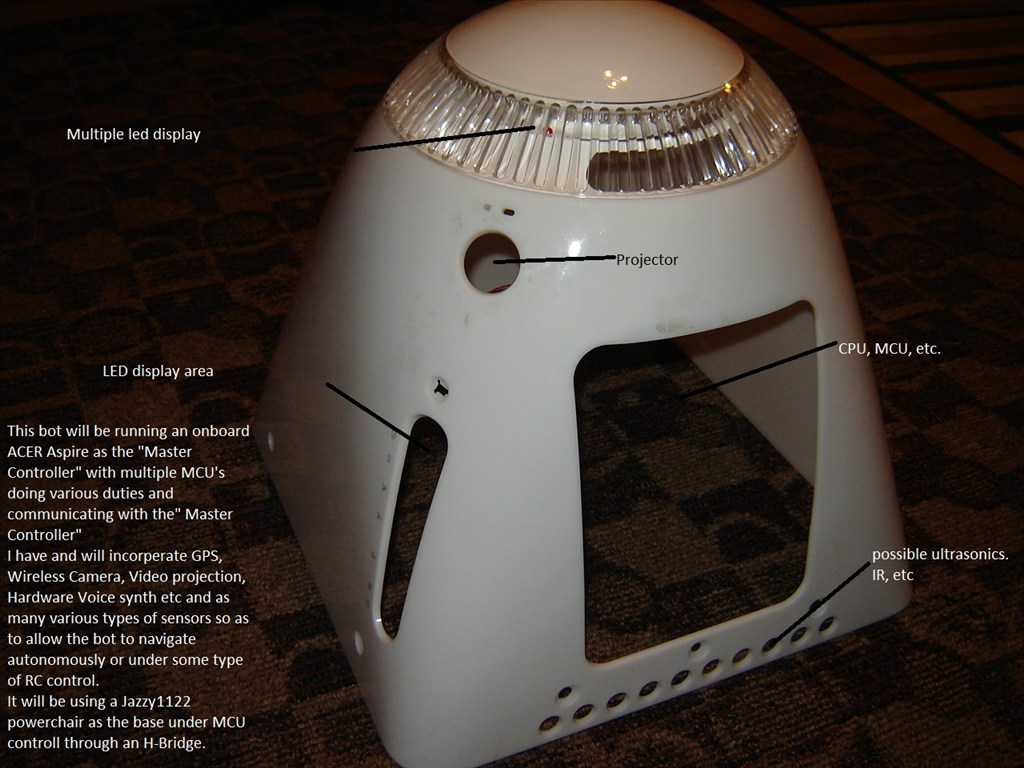
Putt's Bigmack
BIGMACK robotics project begins using an E-MAC housing for the head, showing initial build photos and writeup.

Mikej's My First Robot: Ubm1
Multi-functional robot built with ez-robot kit: rotating metal-gear camera head, servo-scanned sonar, stainless steel...

So you are thinking of running 3 of those batteries? Cool. Is there room in the frive section for all three, to help keep the center of gravity low?
I believe I could remove the drawer and line three up side by side. That's like 15 pounds of batteries though. If I must ill just run two but I want.the bot to be able to go autonomous for 2 to 4 hours at a time without completely draining the batteries as it needs time to dock and recharge. Ofcorse I'm loosing the metal wieght under the drawer that wieghs about 5 pounds and took the cassette and LCD out so I'm not adding but about 7 to 10th pounds I believe in difference from batteries. Hopefully it will have enough weight the dog won't knock it over.
Ok tiny update , batteries on the way , the are 6" L 2.5 W 3.8 tall. They weight 5.9 pounds. So two batteries is 12 pounds , 3 is 18 . I may only install 2 for weight reasons. Also SOUND Deadening is somthing I'm adding in. I'm trying a spray in deadening liner. This is common in high end car audio to block road and wind noise. I'm thinking I could coat the outside of the motor housing and inside where there is no moving parts , and outside all over bottom and top of the gearbox casing. The inside the the bottom half of omnibot would all be coated and inside of torso. Hopefully I can dampen most motor and servo wining! I'm going to take a look at gear housing , if I can fill the gear box area 1/3 with a "gear oil " which is fairly thick ill do that , I believe the bottom of the case is sealed , trick is not putting too much in so the motor itself isn't submerged , this will silence the gears some and add lubrication this little guy hasn't seen in 26 years. . There is a gear switcher for the transmission which I may replace with a servo but it has a "low speed high torque" setting which may be useful for vacuuming or toting around 10th extra pounds of batteries it didn't originally have..
. There is a gear switcher for the transmission which I may replace with a servo but it has a "low speed high torque" setting which may be useful for vacuuming or toting around 10th extra pounds of batteries it didn't originally have..
Clearly I've been playing lol. Here's pics of parts after a day of cleaning , the best results appeared after 7 runs through the dishwasher.
Dude, that looks sick sitting on those tracks! I love it!
Thanks , still wieghing options , on a pos note you could do this on your omnibot ! Tracks would be perfect for your bot! I believe you have a rad right? They are going cheap these days. As you can sew the top of bots head and back are still yellowed a bit but its almost completely clean. Thanks for watching my posts Bret , feedback and ideas are what makes the projects even more creative and exciting.
Agreed that the R.A.D. tracks look quite at home under your Omnibot 2000. cool Nice to know I'll have an alternate option if my Robie Sr's drive is a dud. I also love the embedded PC and the location it's currently mounted. I'd really like to do that for my Robie Sr if I can. Would a little home theater PC (HTPC) running Windows 7 Home Premium be beefy enough, you think? I really want the speech recognition to work and having low power requirements wouldn't hurt either.
That is looking really sweet. Love your plans for onboard ITX Mobo! I am very interested on your take of the track drive train. How much voltage are you going to supply to it. Right now I am giving my RAD 7.2 volts and even in low gear mode it moves along pretty fast. I may cut the voltage in half making two low and two high speeds....not sure yet. As far as sound goes. My wife will back me up on this. RAD tracks are LOUD! The gearboxes and motors definitely need dampening. Your idea with the gear oil sounds awesome and I will be following this closely as well as your sound dampening ideas.
Looking awesome!
;)