
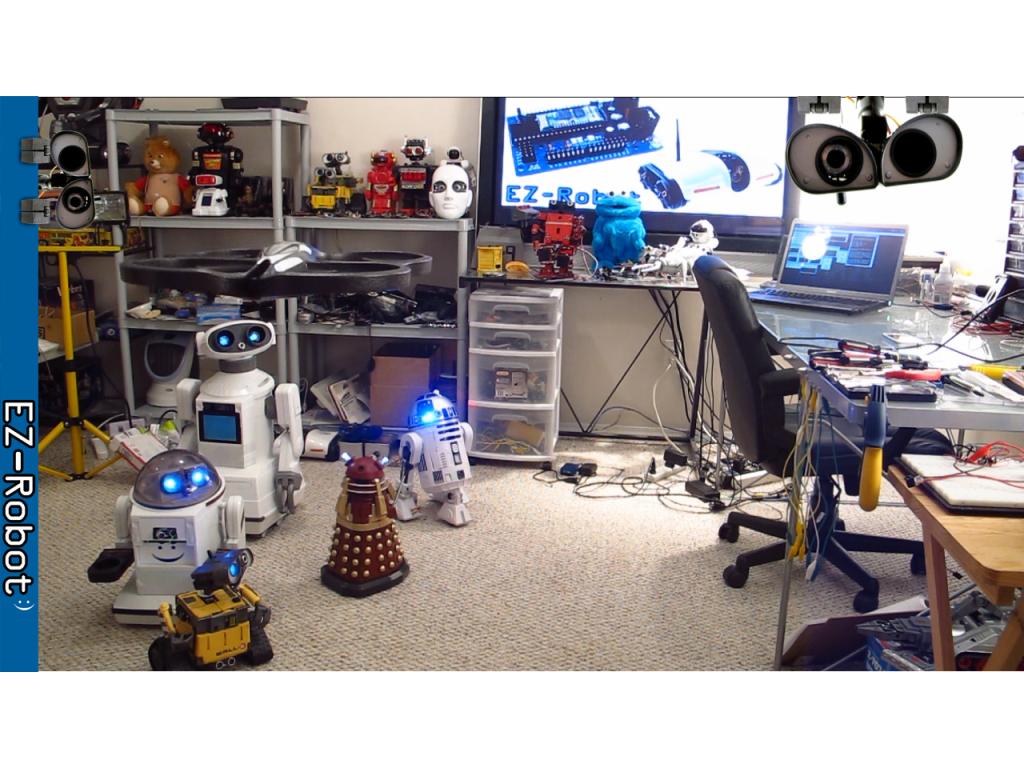
Demonstration how I controlled 6 robots with one joystick in my Pecha Kucha presentation. In this video, I use an Omnibot, Omnibot 2000, Wall-e, Dalek, R2D2 and a flying AR Parrot Drone.
All robots are fitted with an EZ-B Robot Controller and connected to the ARC Robot Control Software. The software will allow up to 5 EZ-B Controllers at one time.
To control the movement from each robot, a movement script was used with respective scripts per movement direction (forward, left, right, reverse, stop).
To synchronize the head servos, the Relative servo control was used. Each robot head servo was related to 2 master servos (horizontal and vertical). The ratio for the relative servos was set to 1:1.
By DJ Sures
— Last update
Discover more robots

Ezang's My New Adventruebot Robot
New Adventure Bot: a first look at a personal robotics project and the creator's initial attempt.

DJ's Revolution. The History Of
Revolution modular robot platform expands EZ-Robot with EZ-B v3 controller, 3D-printed prototypes, tutorials and a...

Ericez's Rori The Coffee Robot For Movie
DIY low-cost robots and tutorials: donated EZ-Board enabled 3D-printed Rori coffee robot for an Indonesian web series,...

I love the way R2 looks the wrong way )
Even now, over a decade later, this is still impressive.