
































































cE9s4PsOgeBQIORwjd5!~~60_1-634818020230156250.jpg)







































































































BO)Lupuc4g~~60_35-634706297915000000.jpg)
LupbT6!~~60_35-634706298769375000.jpg)





C5j!~~60_35-634655044863125000.jpg)
















C5j!~~60_35-634659603510781250.jpg)


































C5j!~~60_35-634651704046230469.jpg)






















































































































































































































































































































































































































































































































































This project has evolved some , the basic rundown is I'm modding two Omnibots , one a regular the other a larger 2000 model. I will have two ezb kits , rad base idea was thrown out because of so much noise but could go back on the table if the omnibot drivetrain is too weak to pull it.





By jstarne1
— Last update
Discover more robots
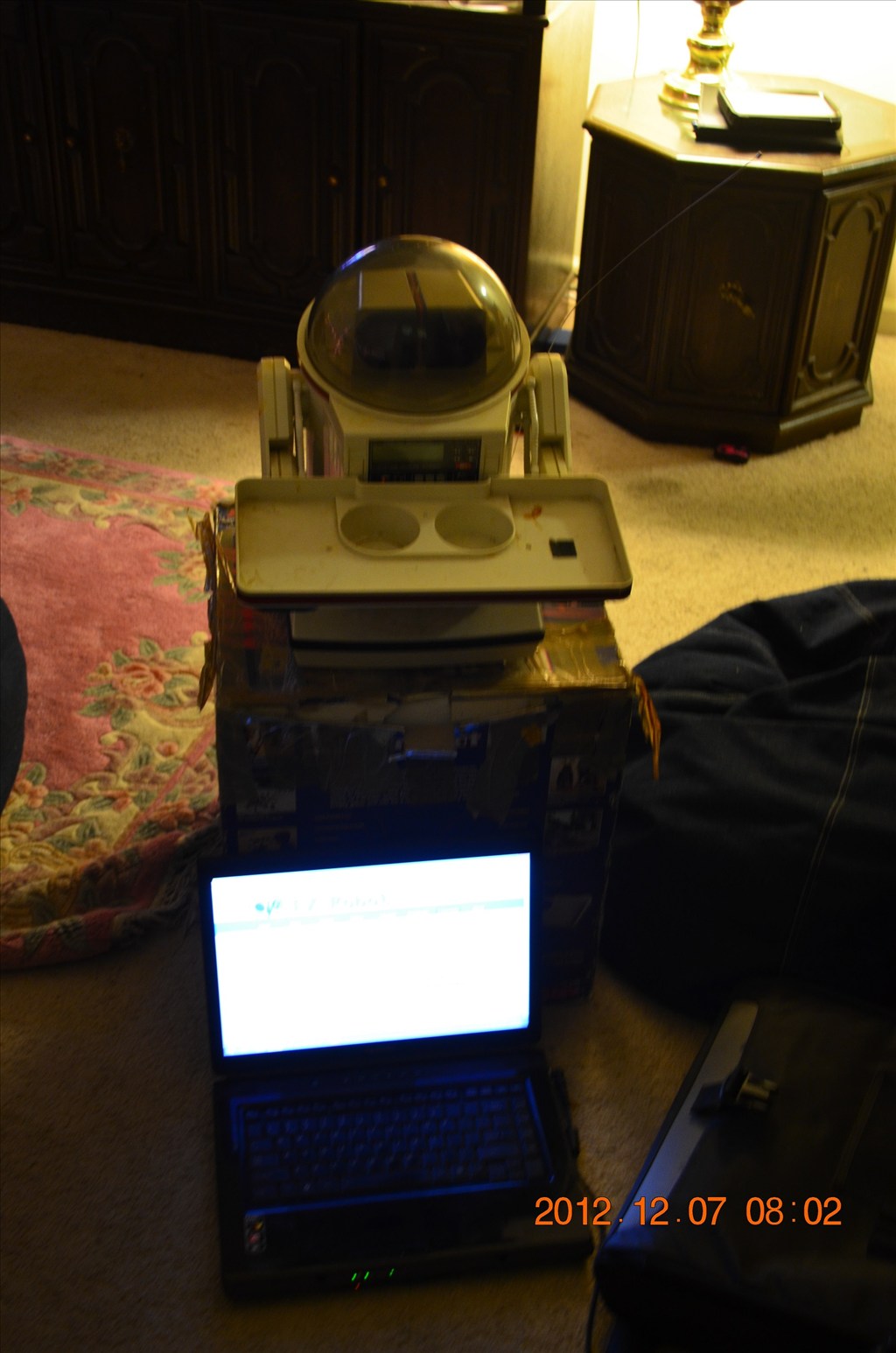
Herg62123's Omnibot 5402 Project - Code Name: Minion 8
Convert a 30-year OmniBot into Minion 8-integrate a laptop, keyboard tray, eye projector and ez-b kit for a Windows 8...

Andy's Lilian Is Assembled And Running
Lilian DIY robot with EZB v4: face/color tracking, voice-controlled drive, arm servos and grippers, MP3 replies; owner...

Louis's The Real Wall-E By Louis T
Build a lively Wall-E with Synthiam ARC: custom carbon-fiber parts, geared servos for wheels, neck and arms, animated...

After looking at the option I.rather cast two gears and attach them to servo.horns and.use servos to.drive.the robot. I believe it will also make less noise too. I believe I would do 4wd , one servo for each wheel. Lucky me I can get drive servos later on lol. Tommorow I get to bondo the sides of risers and do some sanding. Well I correct myself , I must drill mounting holes first to ensure everything cannot move then do bondo lol , I've considered using a couple hsr 5995tg servos because those guys are monsters. , or maybe those pololu power gf 240 oz in servos would work fine? I guess due to this being my first robot.I don't.know the torque figure I should shoot for with a 50 pound bot.
Have you looked at the Tamiya Gearbox?
Thanks Sam , those are not strong enough
I think you'd be surprised at how strong they are but you could also use two. They are pretty compact.
i thought the gear box would not work,why not the design i use (tracks design) it hold a lot more then 70 lbs with 4 high torque motors
Boy it sucks to run into drive issues this late in the build. I feel your pain. What about using gear motors? They have a gear head attached and are super high torque. Plus you can run them off your motor controller. One motor with gearhead for each drive wheel.
sorry, josh. That is a heartache. But, don't give up. Jarvis will be up and running in now time.
Hang in there.
keep trying dude,dont give up