

































































cE9s4PsOgeBQIORwjd5!~~60_1-634818020230156250.jpg)







































































































BO)Lupuc4g~~60_35-634706297915000000.jpg)
LupbT6!~~60_35-634706298769375000.jpg)





C5j!~~60_35-634655044863125000.jpg)
















C5j!~~60_35-634659603510781250.jpg)


































C5j!~~60_35-634651704046230469.jpg)






















































































































































































































































































































































































































































































































































This project has evolved some , the basic rundown is I'm modding two Omnibots , one a regular the other a larger 2000 model. I will have two ezb kits , rad base idea was thrown out because of so much noise but could go back on the table if the omnibot drivetrain is too weak to pull it.





By jstarne1
— Last update
Discover more robots
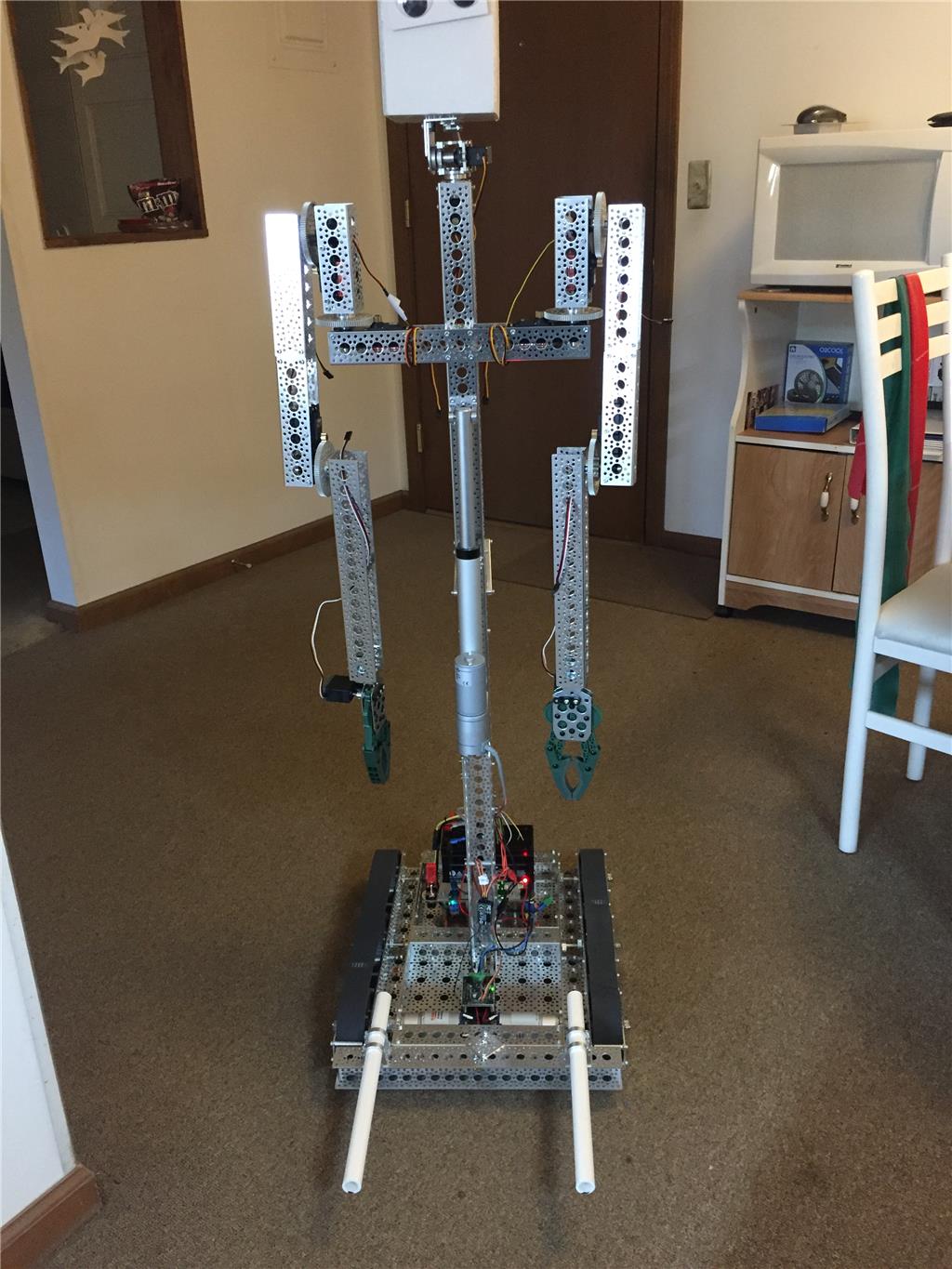
Robohappy's Introducing....HEMI Or HHCB1 (Home Health Care...
HEMI home-health robot prototype lifts and transfers patients using high-torque servos, actuator, sensors, EZ-B control,...

DJ's Robot Blinds Control
Control deck blinds from your phone with a simple DIY setup using hot glue, wood screws and 2x4 scraps.

Canadian's Giant Robot Project With Ez-Robot Board
Giant outdoor robot on Wall-E base using EZ-Robot board and Sabertooth 2X25 RC control; wheelchair drivetrain, planned...

The gear is 2mm center shaft , 12mm long , 19 teeth apparently
Nice upgrade.
You still want that gearbox?
an cut the plastic on the ends if you need too.or remove them i order a gear to match the same in the gear box (called pinon) and the correct drill bit for the motor shaft.drill i had from from drill bit set,better to have the complete set of drill mmm to letter to # never know witch drill bit is needed
JOSH you should upgrade to a digital calipers they are more precision and harbor freight has them fairly cheap i dont like the cheap ones,but still better then a plastic calipers
Where do you buy the pinion that's on the motor from? You went with completely different drive system right? What are you doing with the stock omni drive box?
nothing with the stock omnibot,was looking to sell it on ebay from servocity.com the pinon gear #RMPA48-9
Well I'm willing to buy it from you , also do you have 2 more of these roomba brushbar motors you sent me by any chance?
Basically I must cust about 1/2 inch off the back of my gearbox to ensure fitment then make a mount for these slightly stronger roomba motors. Since I already had to make a custom mount I figure I could make a second mount location higher up but still meshing agianst the same input gear. This would split the load between the two motors and more importantly the robot can handle the incline of a handicapped ramp. I will draw a pic in a few min.
yes i have many more