





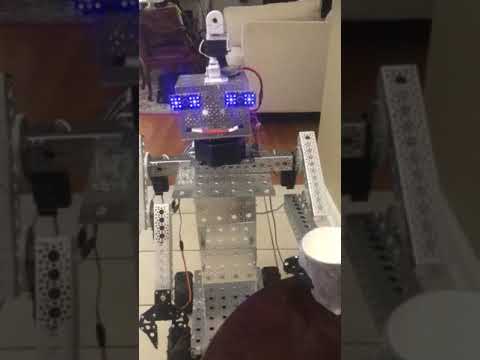

















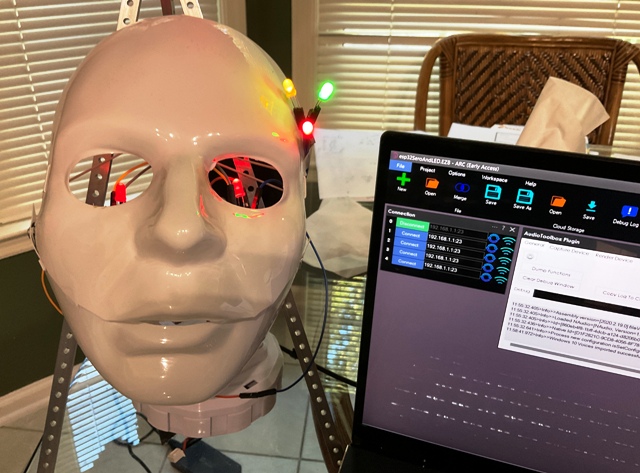
I am using ARC software with 2 iotinys controller, 2 EzB4 controllers - 3 EZ-ROBOT 1300 lithium batteries for the four Ez 360 HDD servos for the two arms, two 996R servos for the grippers, 2 DFRobot rotation hex bases for head movement and body movements. with 2 EZ-robot servos HDD, 2 RGB for the eyes - EZ-Robot HDD servo and moving camera - still need a mouth
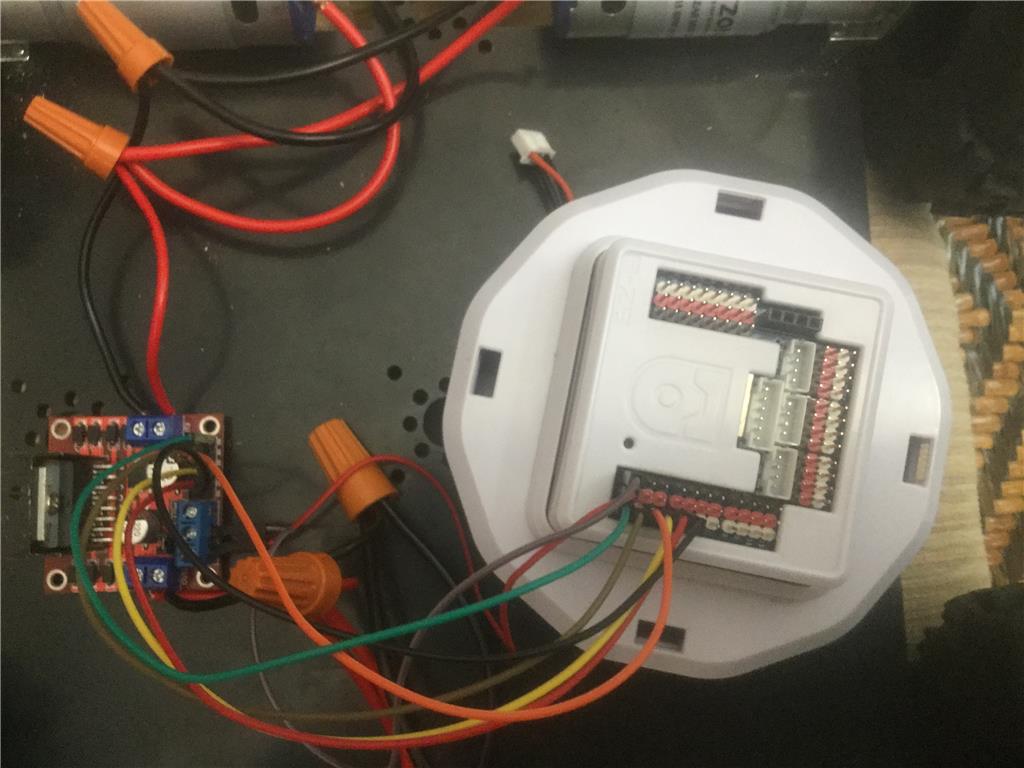
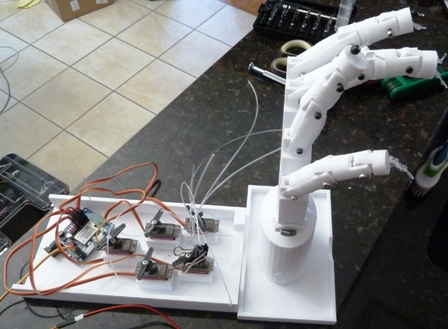
from servo City: 4 gearboxes , channels, parts, extensions, Prowler Robot Kit (wheels, 4 motors, h-bridge pwm motor controller
Here is a sample video
EzAng
By EzAng
— Last update
Discover more robots

Ezang's Life Is Like A Tight Rope, Do You Agree?
Tight rope robot squeaking by once again, enjoy

Tevans's Help With My R2
Drive full-size R2 scooter motors with ez-b using a suitably rated H-bridge or motor controller matched to motor voltage...

Steve's Affirmative. K-9 2.0, Online And Fully Operational....
K-9 2.0 home robot using Synthiam ARC and EZ-B v4 for servos, speech and face recognition, DIY MDF/RC chassis and...

@EzAng question why should the color matter it is using sound waves, I can see the stainless steel being a problem as it is very reflective. I will have to investigate further, and is it worth using? the camera may be enough to detect objects in the robots path.
I only can report what I found.
for whatever reason, it crashed into certain colors, not avoided them - will test again when I get a chance.
The ultrasonic is not the best - :-) Yes it can be used, not trusted
I will try the Sharp IR Radar later next.
https://synthiam.com/Docs/Skills/Infrared-Distance/Sharp-IR-Radar?id=16103
I will see what happens
EzAng - (Ang = Angelo by way)
I did test the Sharp IR Radar, way more sensitive.
The Ultrasonic radar scan is working better, tweaked some settings
EzAng
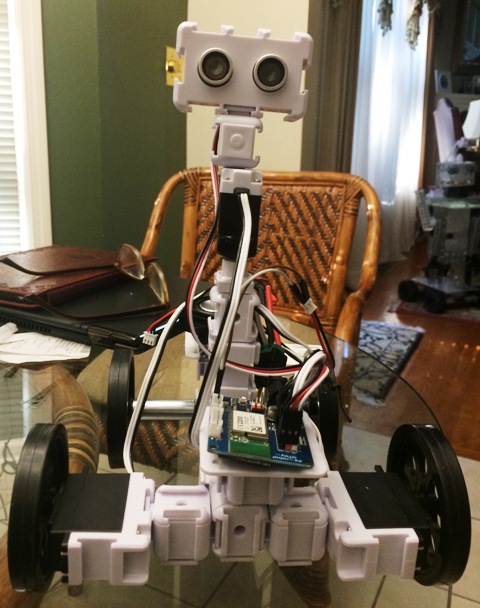
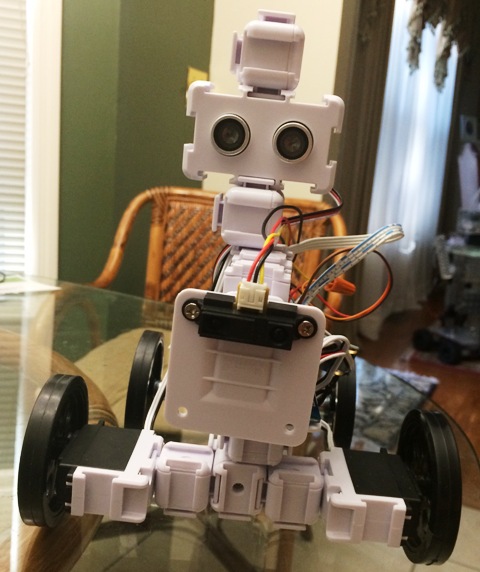
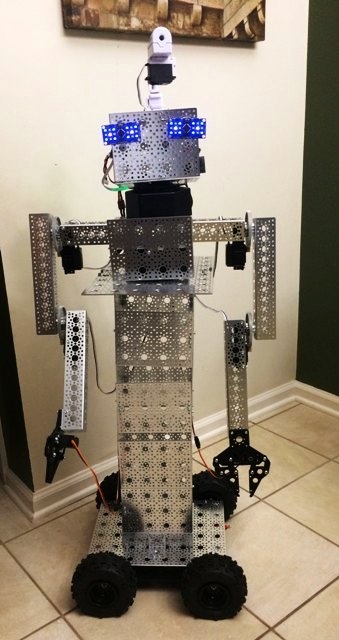
Here is a pic of where I put the sharp IR radar and the position of the ultrasonic radar scan
All seems to be working :-)
EzAng
Practice on "follow the blue line" -
not that exciting but it accurately following the line :-) EzAng
Ezang that is lookin good.you can adjust two thing that wil make the line tracking better. first is the speed.the lower the speed the more accurate the bot will follow the line. second is the angle off the camera.amaging that you are on a bicicle lookin in front off, your front wheel.the chance you will hit somethin is very big,cause you cant see in the distants. just like your camera angle,its straight in front .by lift the camera a very little can be a huge diff. its all about how fast your ezb can calculate the full procces.
Hi Nomad, thanks for your input, I agree slower speed helps,
How are your projects coming?
I have been busy with my country / farm place, I am getting my solar energy and military generated perfected beside trying to tame the wilderness :-)
My wife and I just came back from a bike ride.
thanks EzAng
ezang
great to hear you have good time.projects goes slow but good.:D