




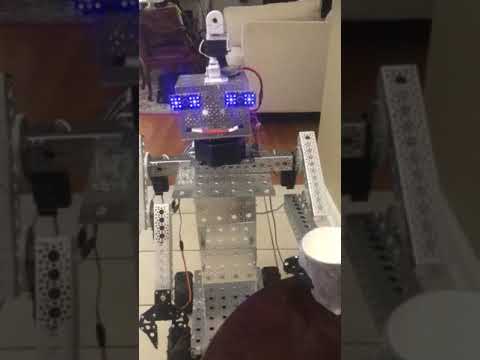











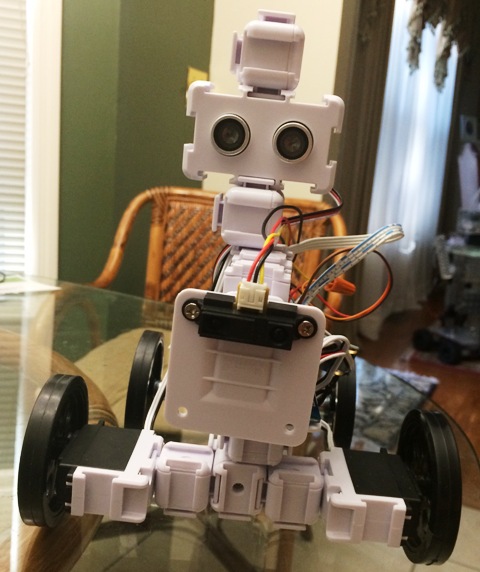

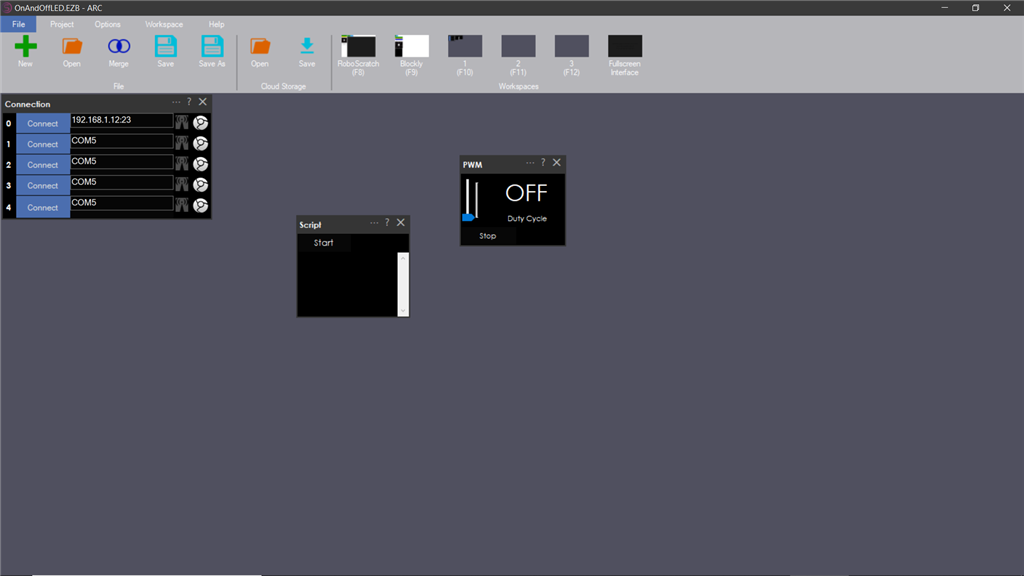


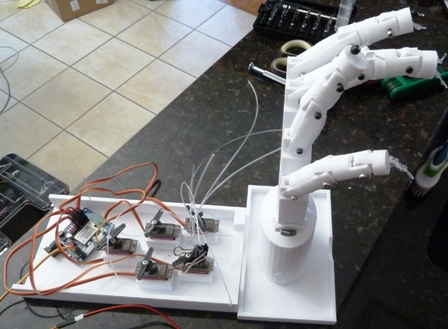


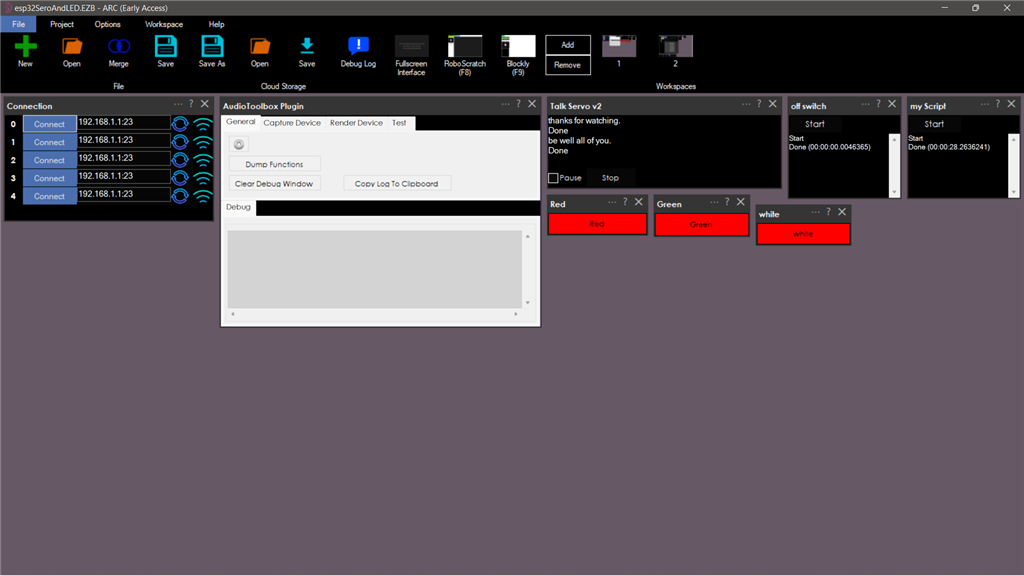

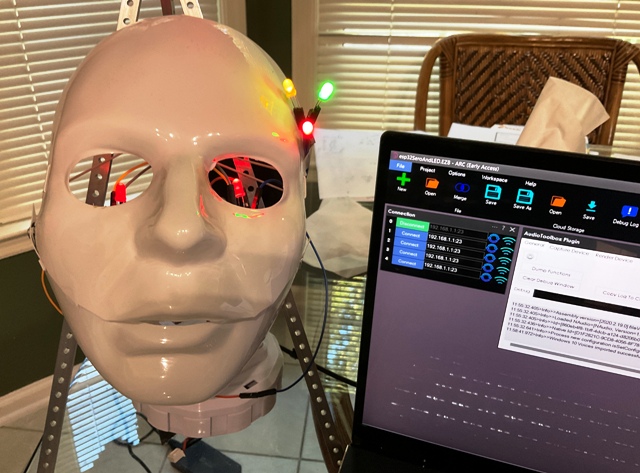
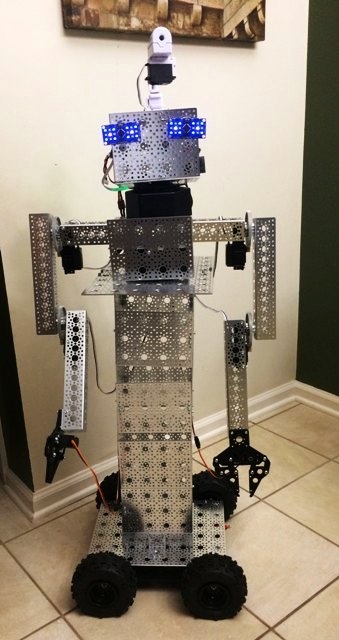
I am using ARC software with 2 iotinys controller, 2 EzB4 controllers - 3 EZ-ROBOT 1300 lithium batteries for the four Ez 360 HDD servos for the two arms, two 996R servos for the grippers, 2 DFRobot rotation hex bases for head movement and body movements. with 2 EZ-robot servos HDD, 2 RGB for the eyes - EZ-Robot HDD servo and moving camera - still need a mouth
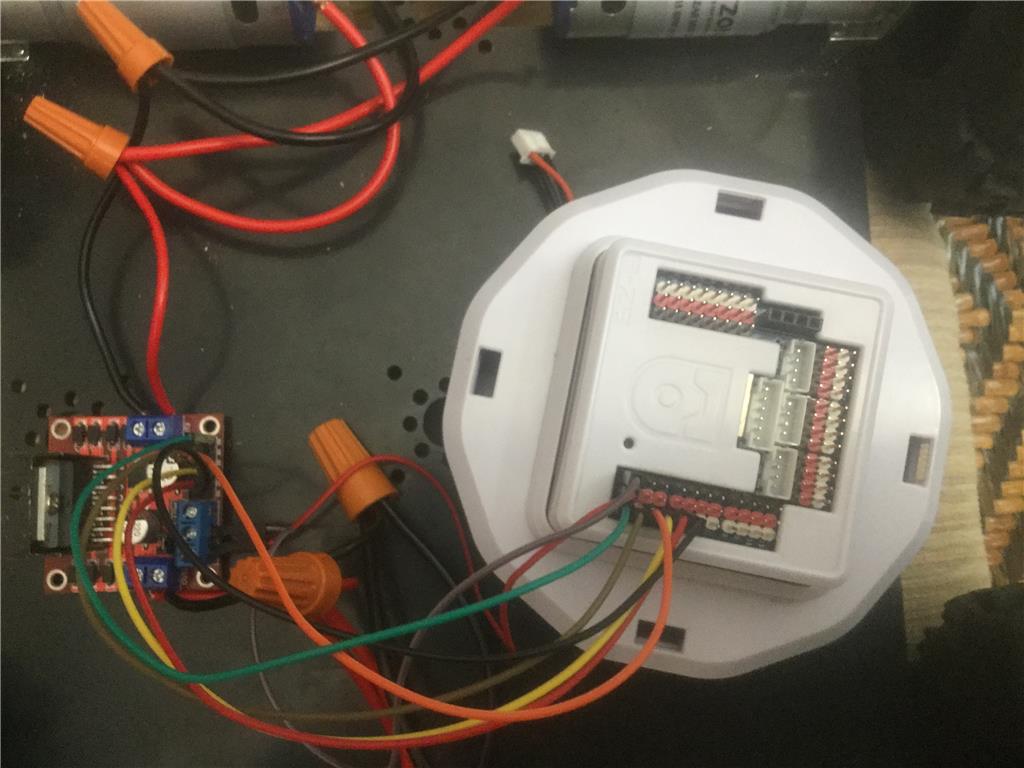
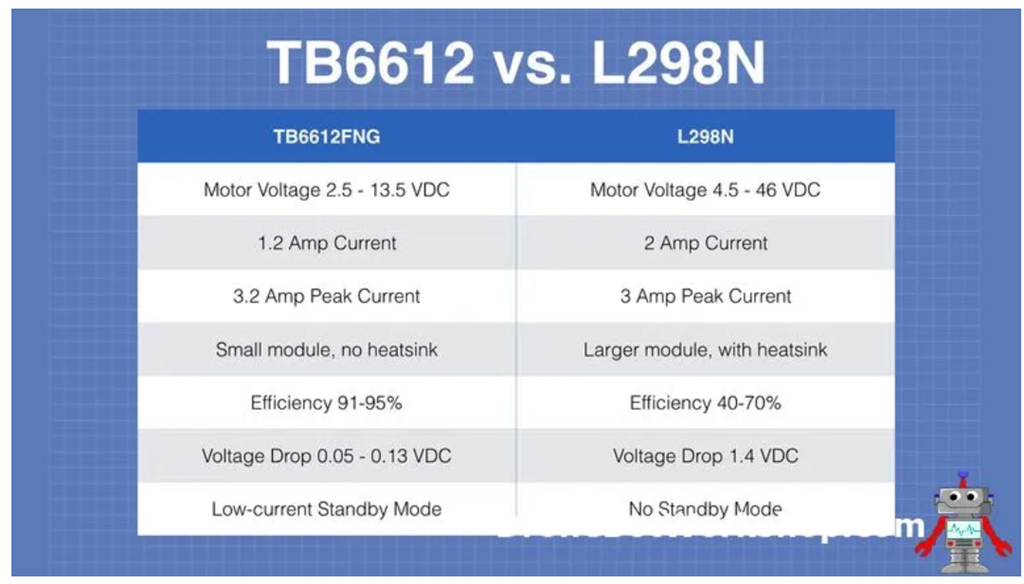
from servo City: 4 gearboxes , channels, parts, extensions, Prowler Robot Kit (wheels, 4 motors, h-bridge pwm motor controller
Here is a sample video
EzAng
By EzAng
— Last update
Discover more robots

Justinratliff's Mini B
Mini B robot from Bret Tallent arrived damaged; repairing broken head, camera PCB, neck servo and right arm; RAD power...
Rb550f's Super Omnibot
Omnibot 2000 project ready for EZ-B v4: worm-drive motors, Bluetooth AM/FM audio, DVD media player, 4" LCD, RC and...

Redzone's Inmoov With A Slight Modification
Animate an Inmoov robot with EZB4 scripting, expanding servo control with EZB3 compatibility and iterative learning and...

love the eyebrows.put an ezbv4 in and some ez robot servo's.perfect
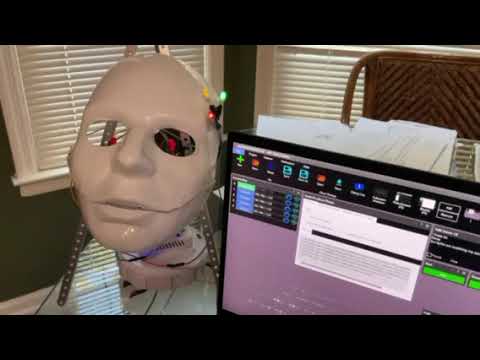
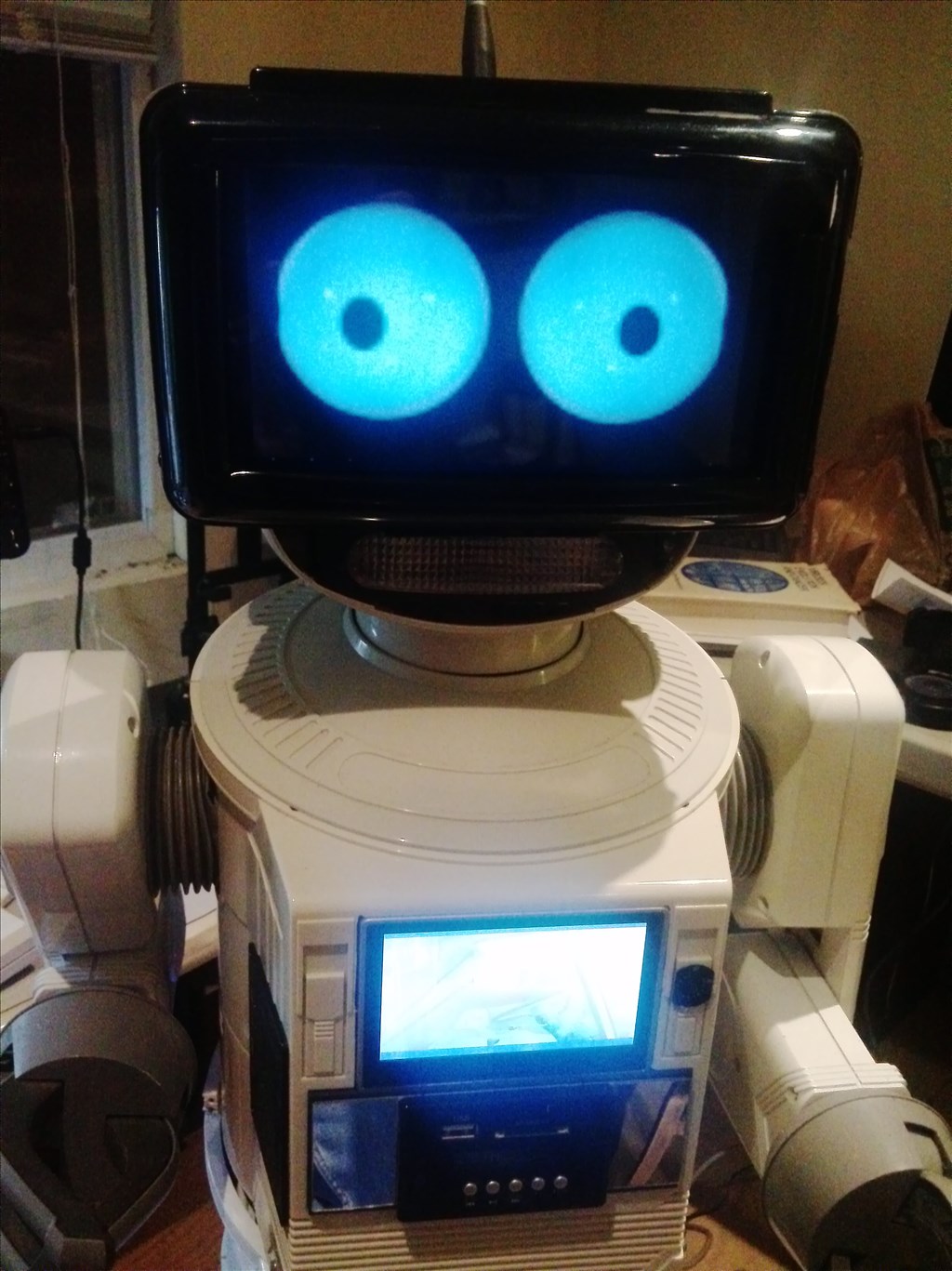
Yes I like the mouth also looks like one servo is the upper lip and the other is the bottom lip, the eyes are like inmoov except a camera is in one eye, in Inmoov one IoTiny would be enough to run that head. The head looks like it is made of blue acrylic. easy to cut out with my laser. STOP this I don't need any more projects. the only one I would make would be if Will decided to sell his .STL files for Alan.
hi nallycat
haha stop no more projects,thats a good one. the alan robot is fabulous design,love the voice to an the female one.
here's is oh bot in the sky.
very nice guys, looks good, video is cool, flying, lol
Nallycat, I am still waiting to see your mouth, eyes in a video, by the way, do you have the STL file for them?
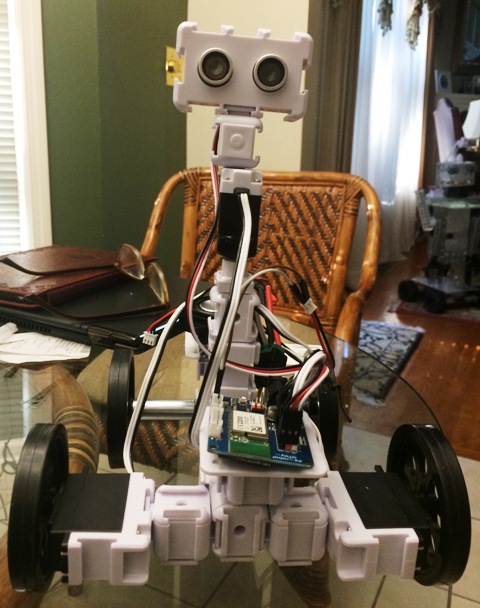
I started this tread with "the ultrasonic radar scan" anyone using this? - good videos here - https://youtu.be/XneX8EIL_qk https://youtu.be/U_xIYUk4qag
This is the back of the robot with the ultrasonic radar scan facing you
ended up with ohbot, go figure, lol.
Haven't seen DJ around, he must be doing exciting things.
EzAng
A break from Mr. Metal.
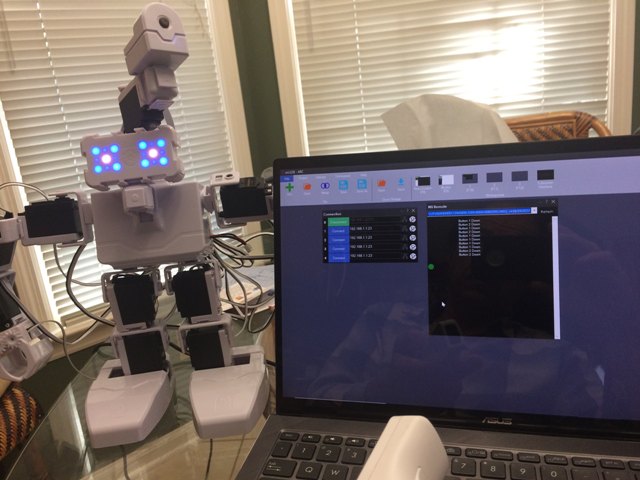
Here is my example of the ultrasonic radar scan, distance and collision:
A litter boring, but it is just a sensor, lol
these are just tests
Had it set for 35 in. 45 in. works better - in the minimum distance before turning
EzAng
@EzAng I Like it alot, yes your distance is to far limits the room it can move maybe one foot would be better. I have several ultrasonic sensors. I may try using one on COG. Is it fixed or does a servo keeps rotating the sensor left and right?
Hi nallycat, I set it up that servo keeps move right to left scanning.
I will do a few more tests on the pinging - "minimum distance before turning" situation.
I will test nearer and then farther.
Thanks
EzAng
My ultrasonic may not be up to the task for these tests
Here are the things I observed:
need correct lighting minimum distance before turning - noticed it works best starting pinging at 35 in. tried smaller ranger 10, 12, 20, in. does not work speed of the wheels - the slower the better certain colors it can't recognize, example stainless steel, black...others
make sure you use the same D - example D2, or whatever, for the trigger port and the echo port in settings in a 3 wire ultrasonic
Will keep testing later
Thanks EzAng