


























It's just a concept right now but I wanted others to see that the scale doesnt quite match. Right now its just stacked on there and neck is a little too long.
By Troy
— Last update
Discover more robots

Danger!'S My B9 Robot
Full-size B9 Lost in Space replica with hinge W waist mechanism powered by a salvaged drill motor; testing EZ-B...

Steve's Artamus, The Rambo Knight Robot Hack
Artamus Rambo Knight Autobot hacked with EZ Robot control: RC soft-hack, VR, voice synthesis, servos, 9-DOF arms, LiPo...

Ezang's My New Intro To My Metal Robot With The Arduino
Metal robot with Arduino: an introduction to the project and an invitation for feedback

I am just rolling my eyes! Great job.
sick blush eek J
J
Thanks guys! I hope more to come soon. No promises. Lol
@Troy no pressure! Lol
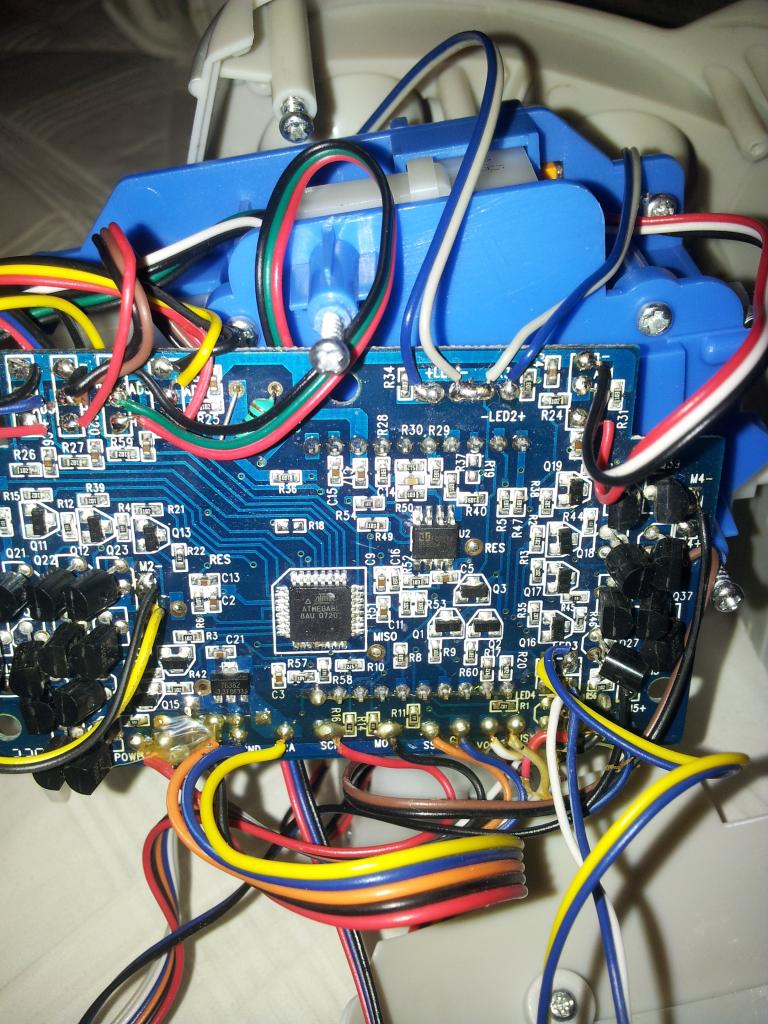
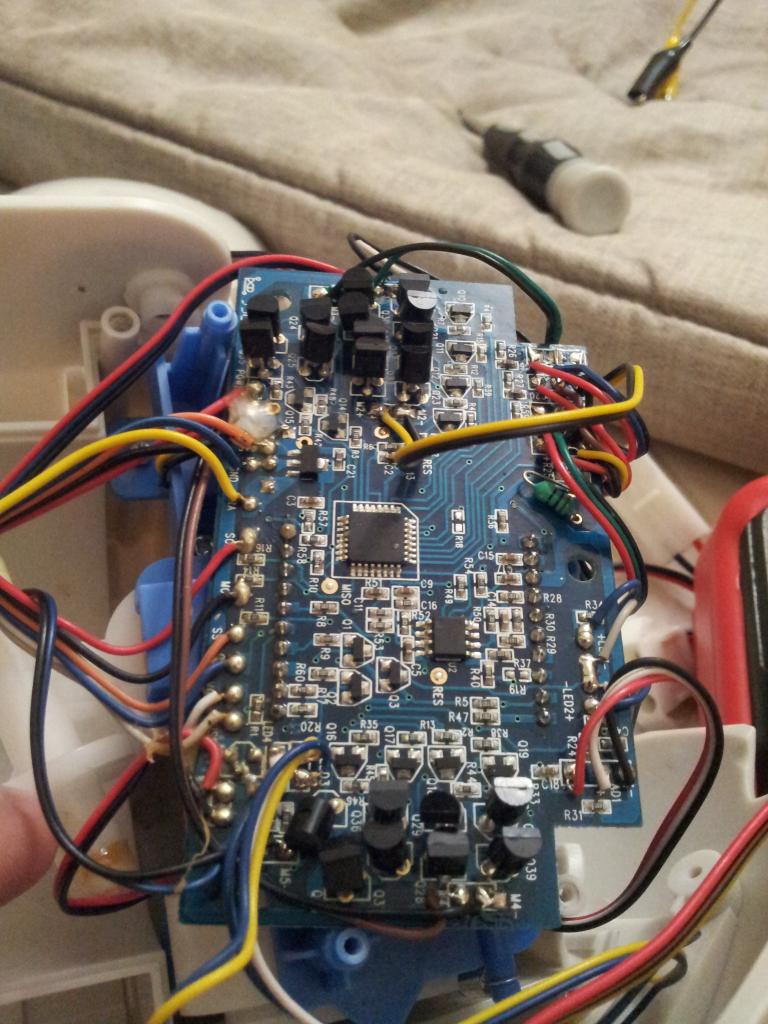
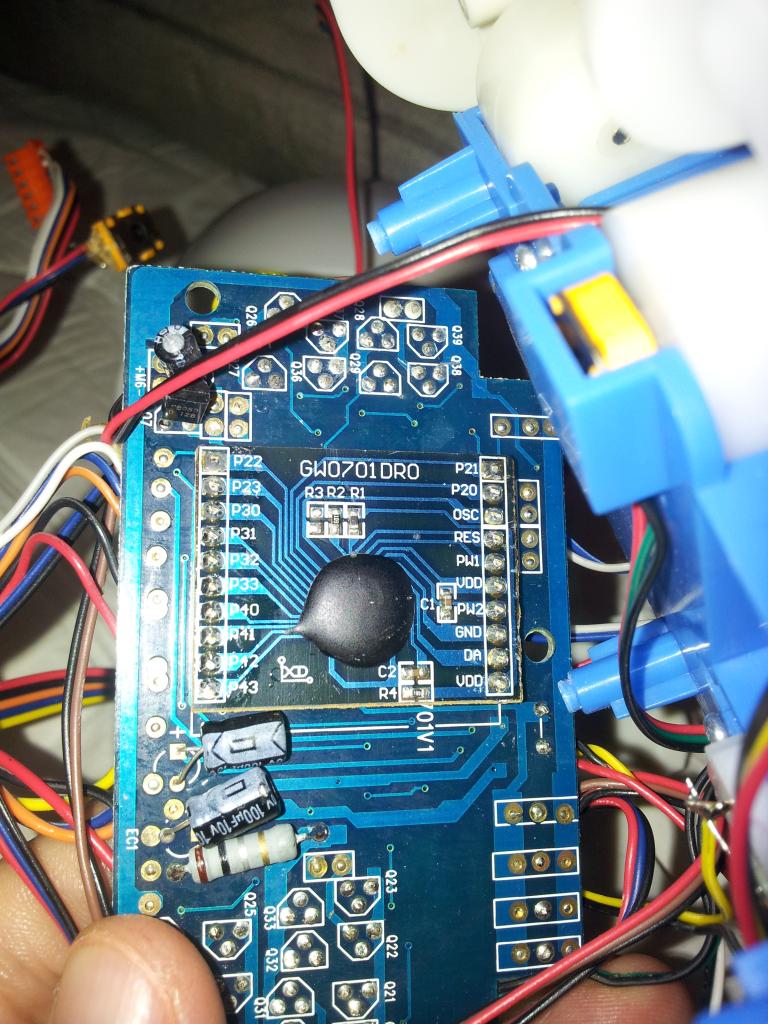
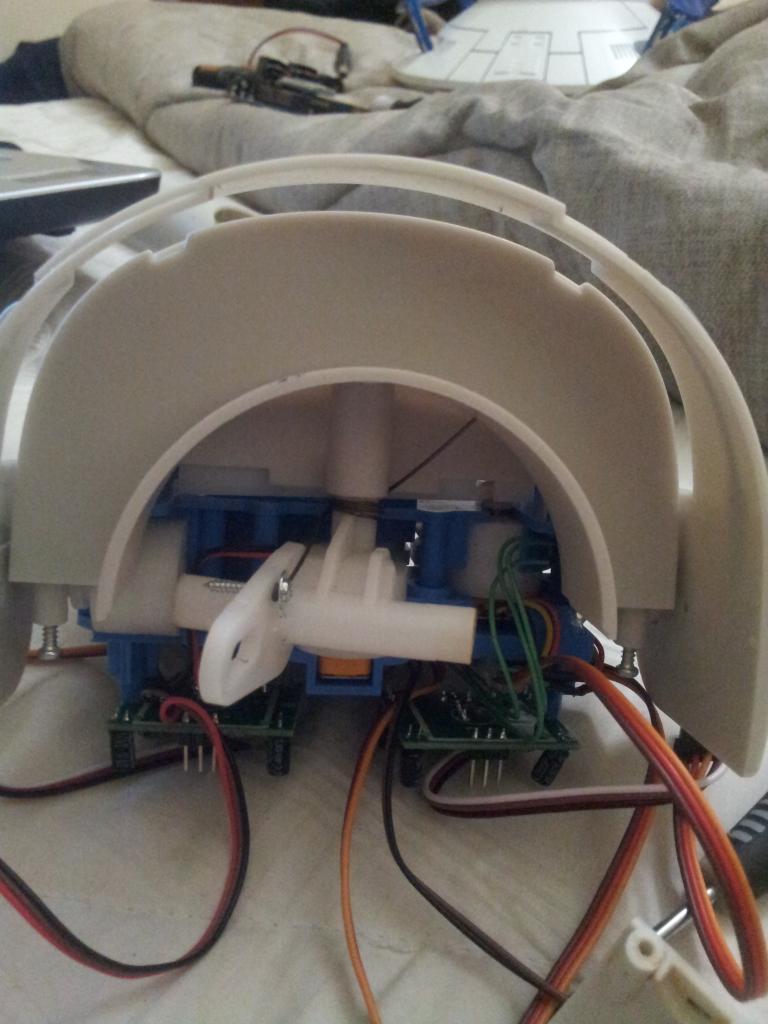
Hi Troy.. would you help me with some more specific "how to" use the head ? I saw in the early posts that you was able to use the native hardware.. how did you do that ? and saw later that you took off all the pieces and put some microservos.. Was that a better solution ?
thanks for all your help!
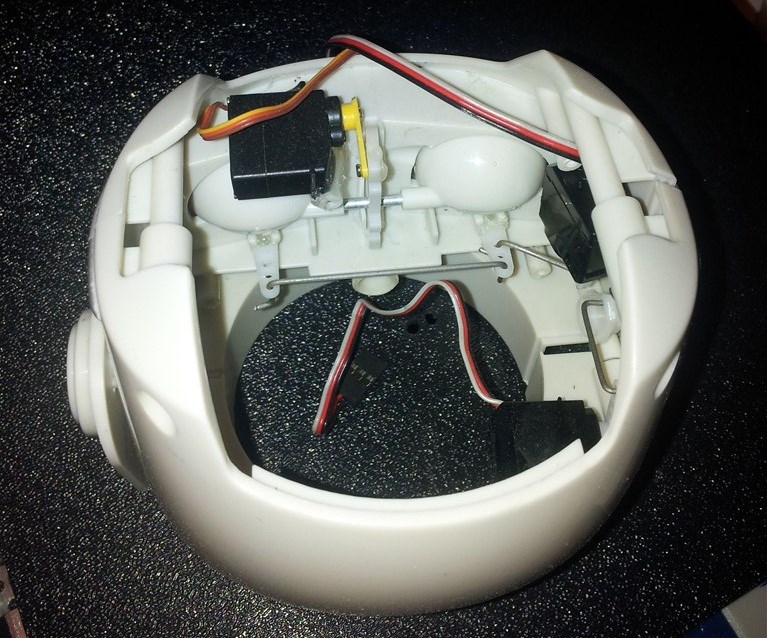
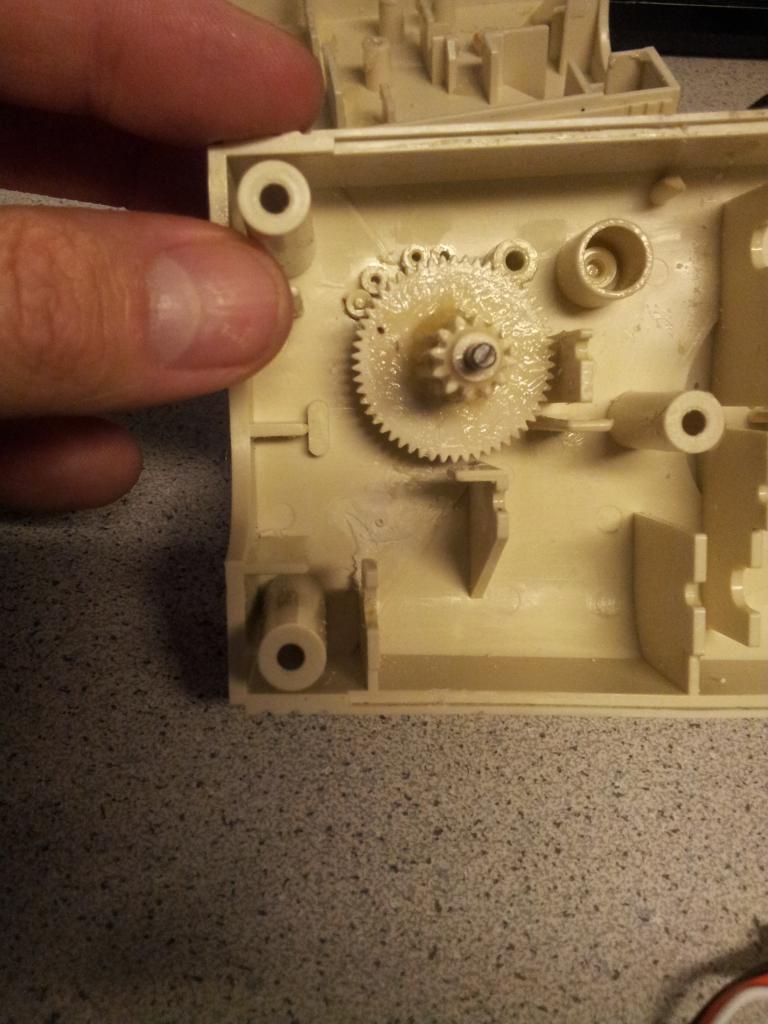
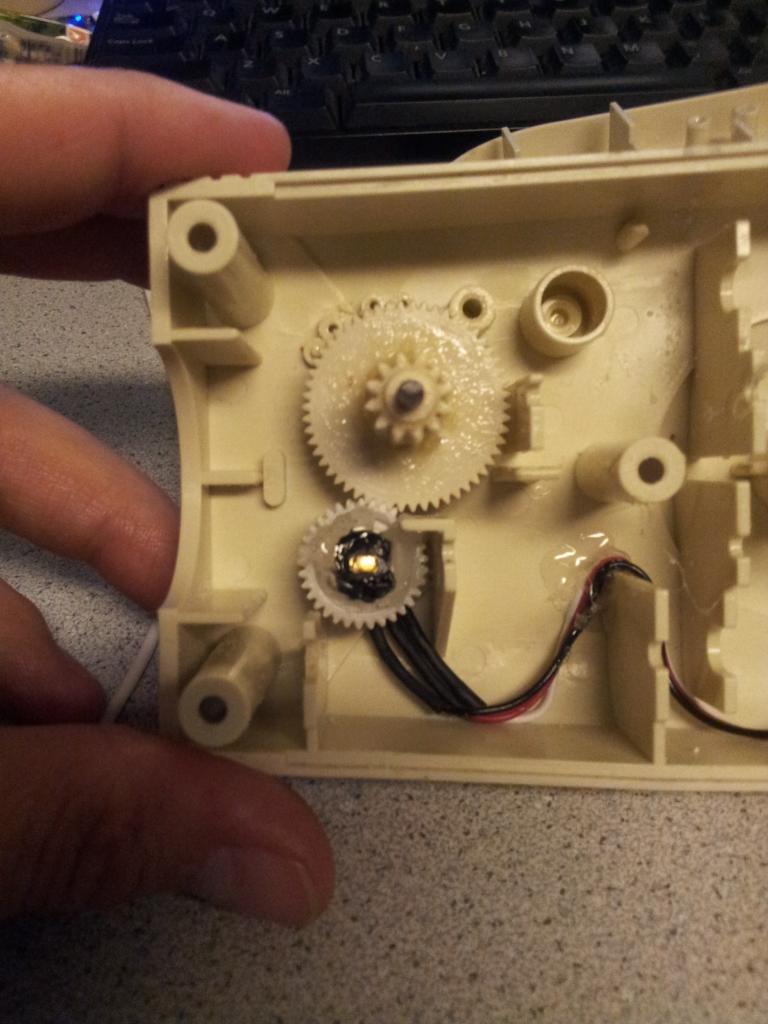
@tevans, Yes it was better in the long run. There was too much looseness in the neck gears. You can see that in an earlier video. I tried tightening it up with some springs but really it was better for me to replace it. It is also less work than making those servo boards. Also, I freed up more space inside for other things if I decide to use it later. Good luck to you!
LOOKIN' GOOD MY FRIEND!
Hey Troy,
Wow, it took me a little while to catch up. I am so glad to see that you are still working on pinhead. :o)
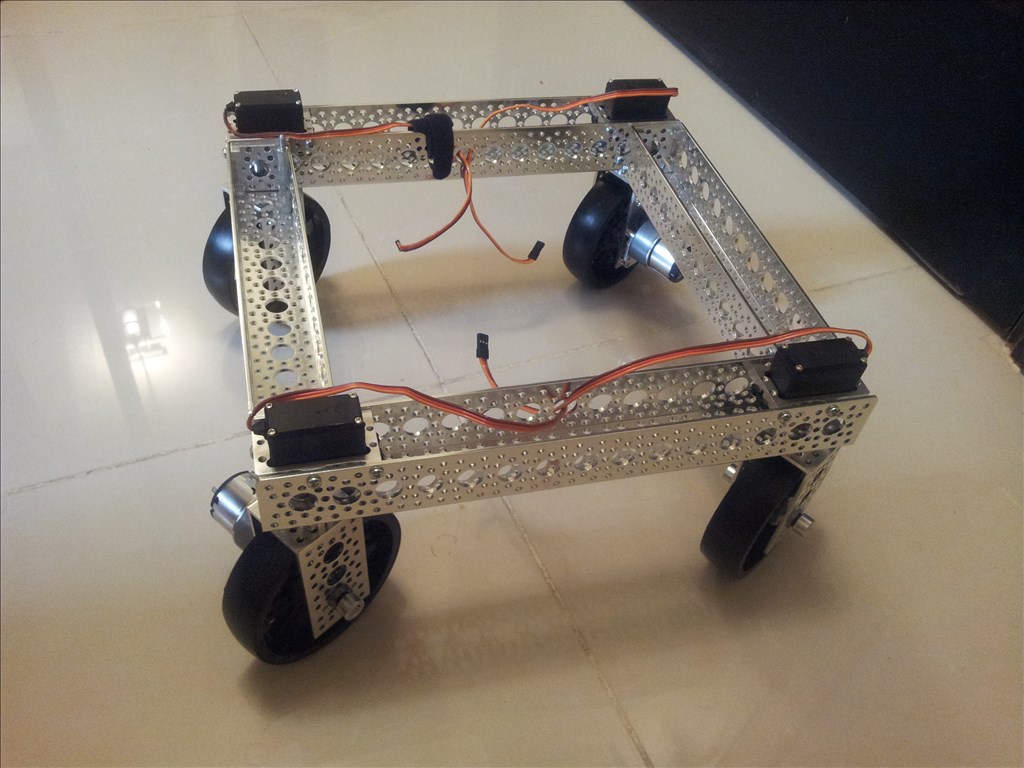
That base looks nice and light wright.
How are things?
heh Pinhead has been on hold again. I still think of new things though.