
Hello Guys my Self Mohanish From India and i'm also an Mechanical Engineer and working as a Designer. i would like to know that how to make robots? frankly speak i'm totally unaware about it. i was try searching on Google but cant find anything what i required. on Google i was find this site and its look like what i required
I need to know how robot works?
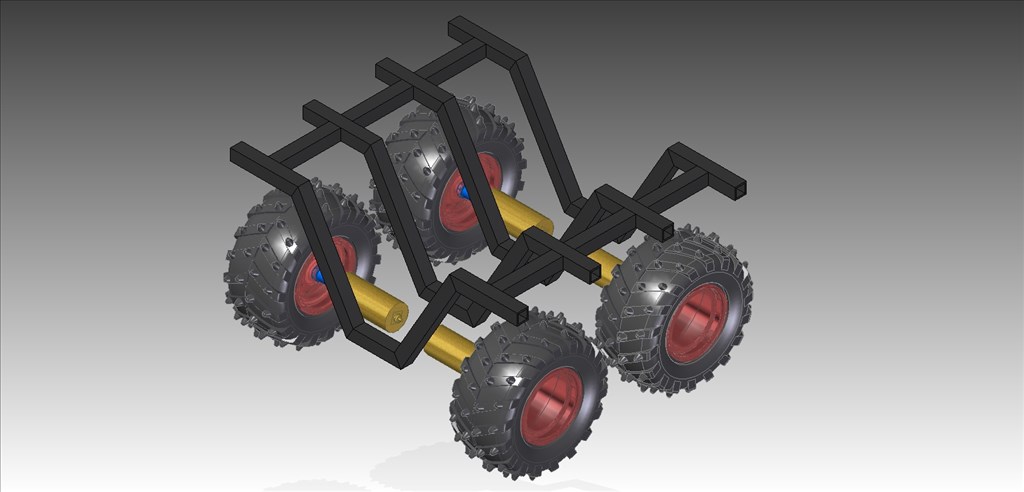
I need to know which parts are Required for making 4 wheel Drive Robot with operated with Laptop or remote control
I need to know what parts do what things.
i need to know from where i get that all parts.
i need to know how to assembled all that parts electrically and mechanically both
All of u r requested to shear your knowledge with me
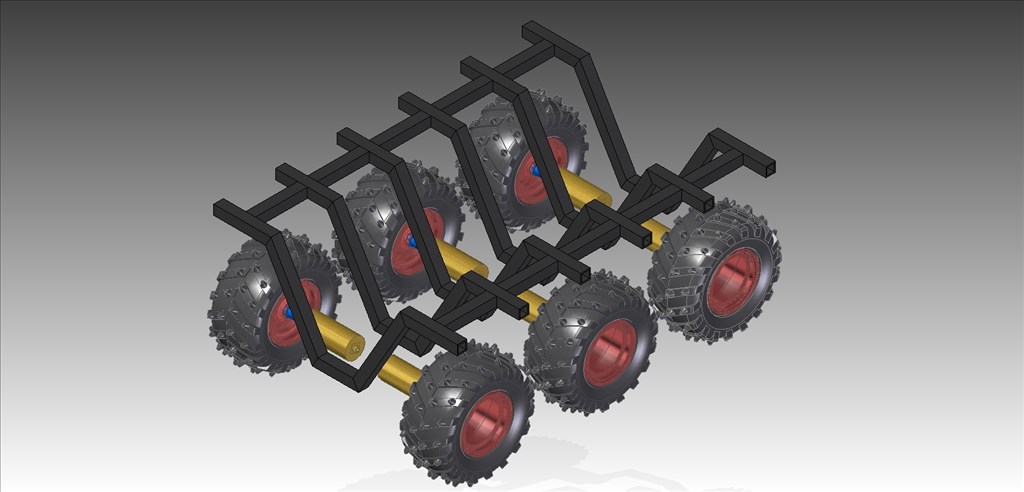
here i'm attach 2 Photos which i was make in 3D
By mohanish
— Last update
Discover more robots
Toymaker's Altair Robots In Servo Magazine
ALTAIR robots featured on Servo magazine July cover; Dave Prochnow spotlights Tony's robotics work, 1979 programmable...

Ccraig411's Roli
ROLI robot built and ready to program with the developer kit; 3D-printed parts complete a home-built bot for hands-on...

Kenny's Humanoid #2
15 DOF humanoid robot built from a budget eBay kit using MG995 servos, EZ-B head control and Castle 10A regulator; power...

Hi mohanish Welcome to the forum. Hope you have a great time building robots. Could you more specific on what you want your robot to do.Now to answer your questions. Here is a list of videos to help you make your robot
Tutorials By the look of the design I can tell that you want to use a motor for that you will need a motor controller. Here is the one that ez robot sells
2.5 amp motor controller
Then you will need the brain. Ez robot has the most easy to use and most powerful robot brain
Ezb
Using ARC you can control your robot from many devices and even joysticks. You can also program your robot from here
ARC You can also give your robot vision
Camera
If you want your robot to avoid hitting objects then there are many types of sensors here are the ones ez robot sells Ultrasonic distance sensor
If you want the camera and sensor to move then you have to buy a pan and tilt or you can attach two servos together. There are many types of servos here is an example
Servos
If you do not want to use motors you can use continuos rotation servos It comes in the developers kit
Developers kit
People who have programmed there robots already have put the code on the cloud
Ez cloud
Here is the ez robot scripting manual
Ez script If you want to you can buy a robot and add the ez robot brain to give more functionalities Hope this helps
Thanks a Ton for explain in this much in detail
my Robot Requirement
1 It should b 4 wheel or 6 wheel. 2 It should carry 5 Kg. load. 3 It should b operated wireless, (By laptop or by remote control) with mim range of 1 Mtr. 4 yes i need camera system in my robot so that i can see where my robot can go so i need wireless camera system so that i can see 1 Mtr ahead from my robot. 5 tell me alternate options for this robot parts so that i can easily find and buy in my country. 6 Servos motors r required for this robot?
You can get the wheels from many places online bet because I do not live in India I only now one store in India that sells robot parts Shop here are some stores online that are not in India
Sparkfun
Trossenrobotics
www.digikey.com You will notice these stores sell another type of robot brain called arduino. I would recommend you buy your robot brain from ez robot so that it has more abilities and is easier to program
Ez robot brain 2 will your robot need an arm 3 It should be easy to operate wirelessly using ARC link is in post 2 4 here is slink to the camera
Ez robot camera For your motor controller it depends on how big the robot is. Ez robot sells a 2.5 amp motor controller for medium sized robots like an Omnibot Here is a link to the motor controller
2.5 amp motor controller hope this helps
thanks A Ton!


Just to clarify you will need 3 x 2.5 amp motor controllers for that 6 wheeled robot.... 1 for each pair of motors... That will use up most of your EZB ports.... However, if you use a 2 x 12 Sabertooth motor controller you will only need one port on your ezb to control all six motors
will you guys please upload with it's photos so that easy for me to understand. and any schematic diagram for all electrical and mechanical parts if possible.
If you are making a six wheeled robot I suggest using what Richard r said but here is the picture and video for the 2.5 amp motor controller that ez robot sells click on this Link
On the first page of this thread in the link below there is a video turn to 3:20 sec to see how to plug the camera in
synthiam.com/Community/Questions/5586