


























It's just a concept right now but I wanted others to see that the scale doesnt quite match. Right now its just stacked on there and neck is a little too long.
By Troy
— Last update
Discover more robots

Csa459's Ok Guys Wet And Dry Vac For Robot Start With
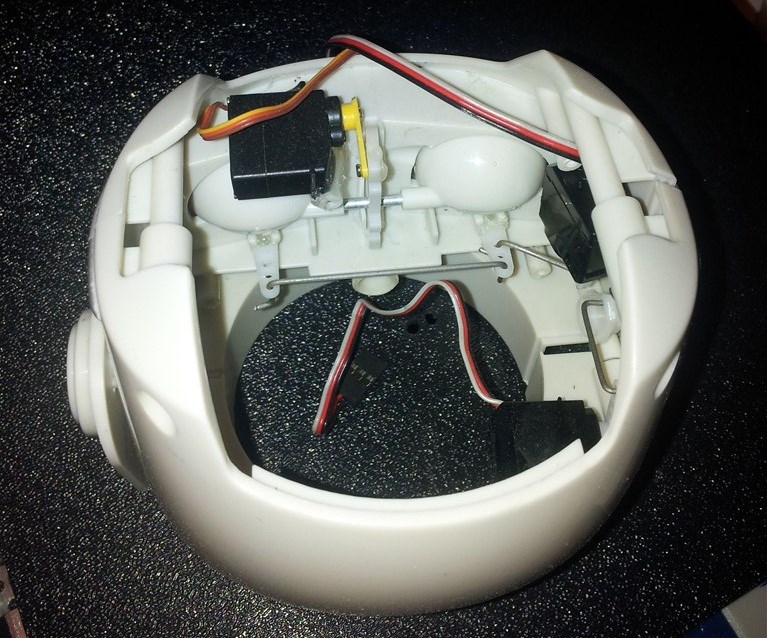
Repurpose an old wet/dry vac shell with an EZ-B kit-ideal starter for a planned build after Christmas, prepping parts...

Ezang's My New Whirlybird Project For You To View
Whirlybird showcase: a new Servo City ARC robot project highlighting servo-based hobby robotics

Robo-Chess's Hector
Hybrid Pib/Inmoov humanoid using Synthiam ARC for vision, speech, object recognition and LLM-enhanced conversation;...

Thanks Bret and Irobot I actually didnt know that. I'm using a dremel with a cutting wheel. The dremel is a great all purpose tool for the "small" bots. I may need to buy some brackets instead of the stand-offs I originally was thinking of doing. They are too thin and will probably work loose with all the upper body weight. Im thinking of these to taper the top corner in.
Too bad you cant make your own brackets from thin sheet metal using cutting shears and a drill! Buy yourself tin snips and you will be making a lot more stuff! don't forget the file.
don't forget the file.
These are a bit stiffer than I could make.
In hindsight I should have posted a video of it before I took it apart.
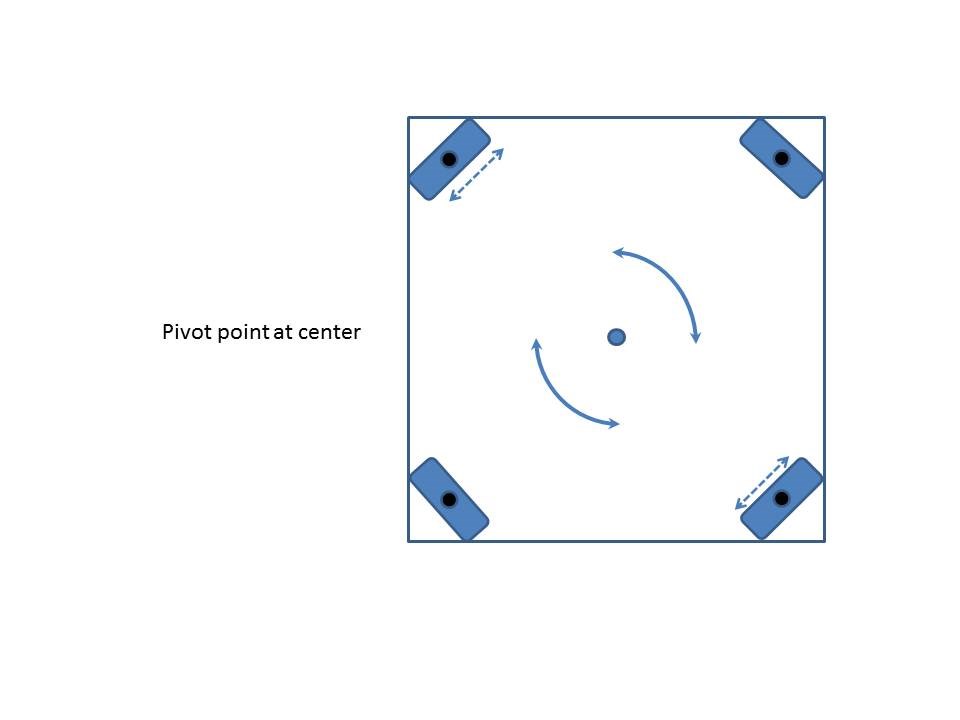
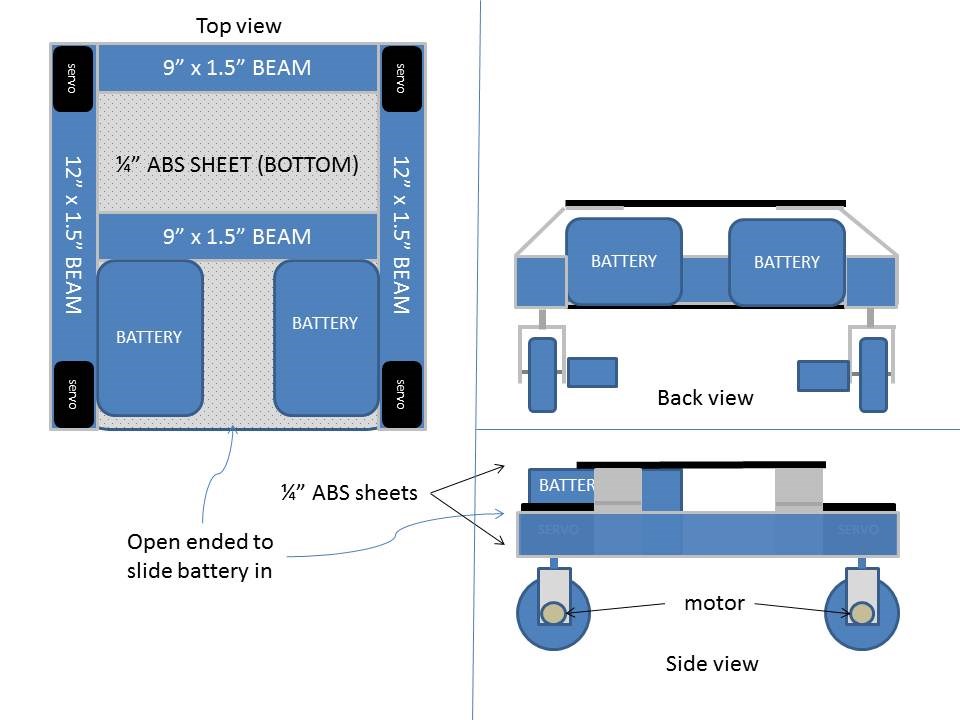
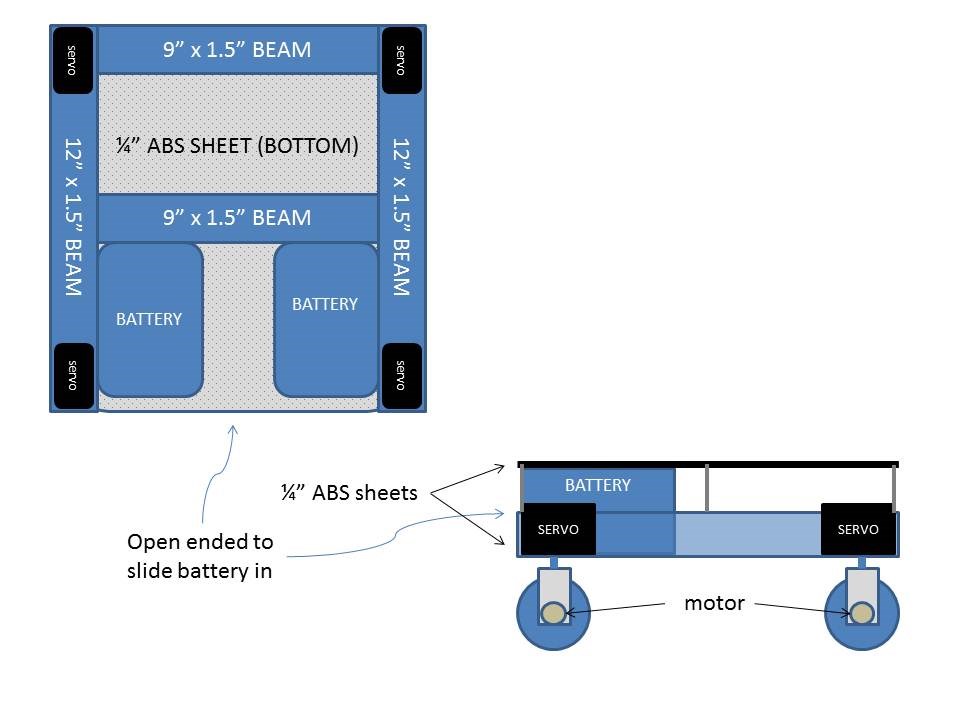
Small update to the frame plan.
Although this shows 2 batteries I won't add the second one until later. It's for additional amp hours in a 12 volt system.
Looks like a good plan.
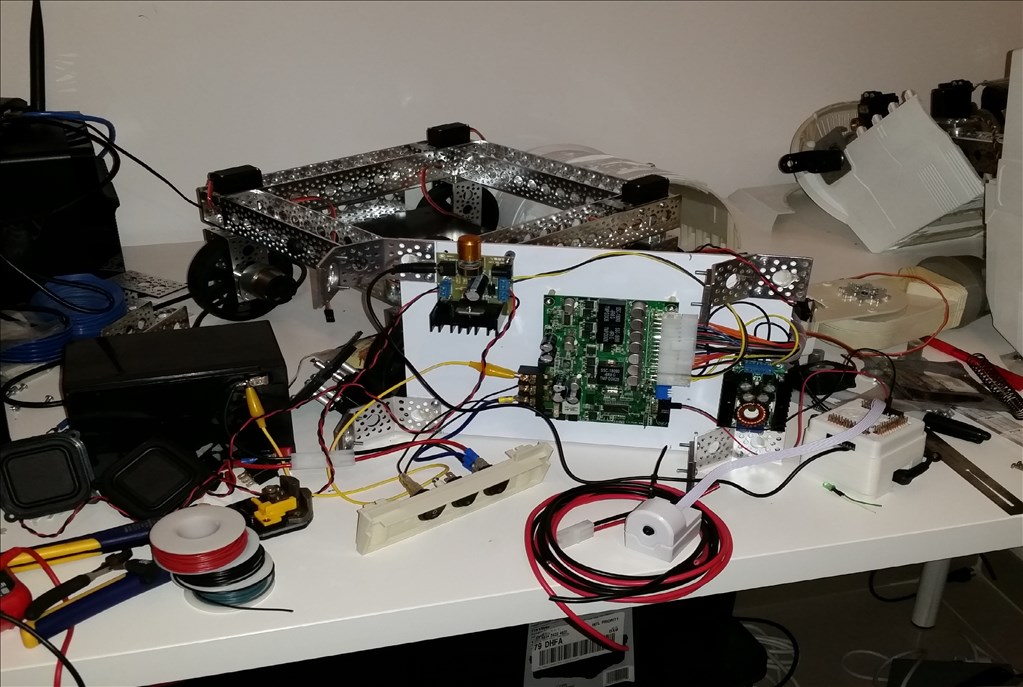
Thanks Dave. I'm waiting on more hardward fasteners, M4-ATX DC-DC power supply and a fuse block from the post office. The lower ABS sheet will hold the PS and charger. The upper will have the fuse block, power distribution block, an I2C bus, a couple small DC-DC converters, TrexJr motor controller and EZ-B. Maybe a signal terminal block though I'm not sure yet.
I'm waiting on more hardward fasteners, M4-ATX DC-DC power supply and a fuse block from the post office. The lower ABS sheet will hold the PS and charger. The upper will have the fuse block, power distribution block, an I2C bus, a couple small DC-DC converters, TrexJr motor controller and EZ-B. Maybe a signal terminal block though I'm not sure yet.
I have had a setback with my power supply I ordered. It didnt work and I sent it back. I should get it in the next 5 days.
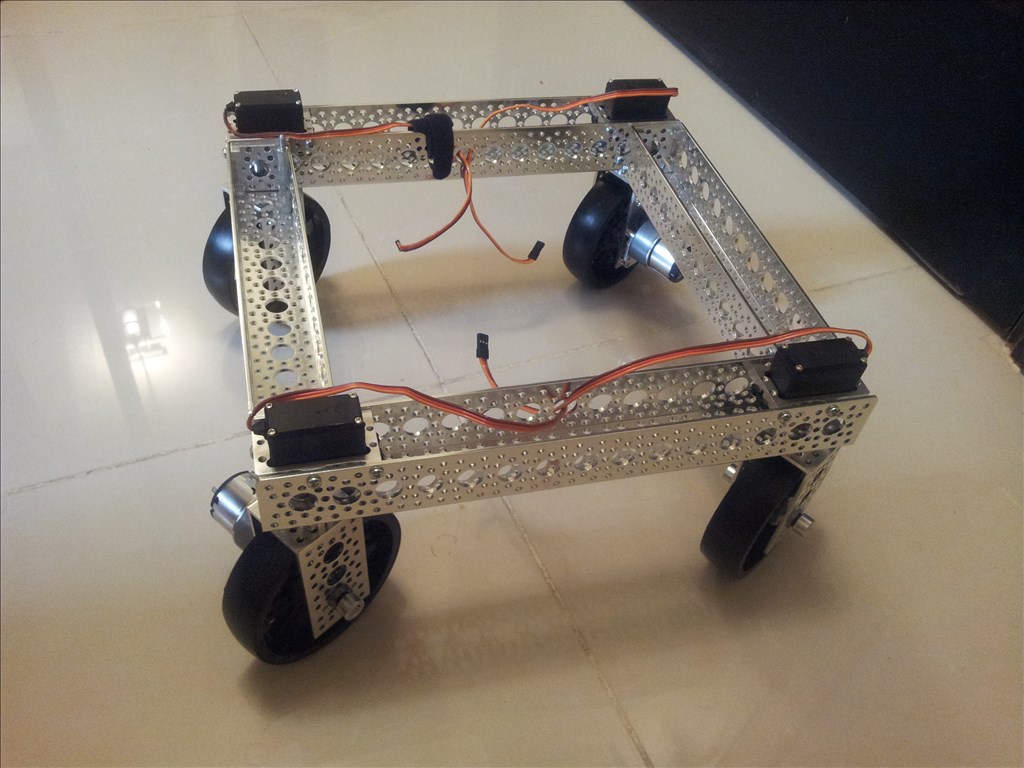
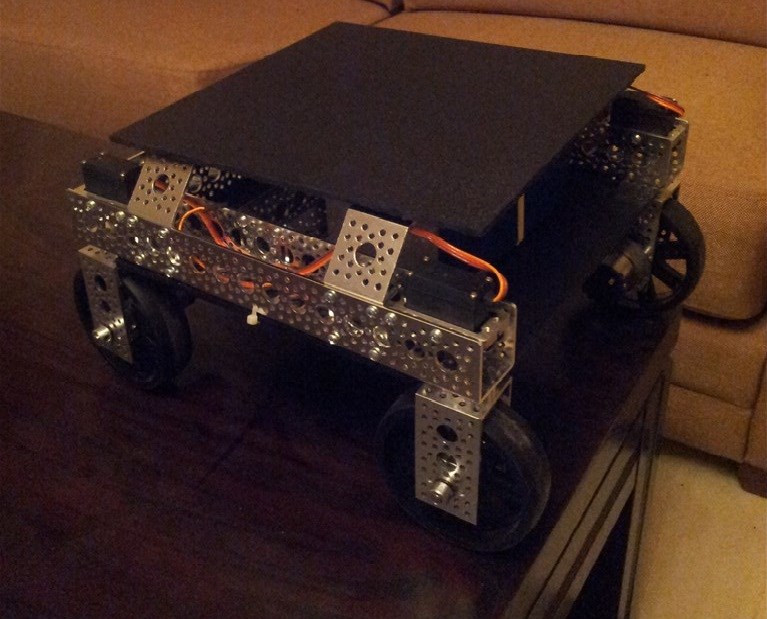
The base frame shown above is complete.
I re-did the head with micro servos so I can fit hardware to change the neck articulation. I'm not 100% sure how I will do it yet.
I also fixed the waist with a new lazy susan that was suggested in the forum previously. Works like a charm.
I'm also waiting on hardware to stiffen the elbow joint with the direct drive servo.
I was thinking of using a chain gear arrangement to increase power and reduce range from 180 to 90 degrees however it will mean more cutting into the plastic and I dont want that just yet.
I know it isn't much but that's where I'm at. I need to hurry up because I will be job hunting in 6 months! Not fun.
Well that sux about the power supply (think about using the human "by product" from your Robots in the news article! Sorry to hear about the job hunting, but there is an upside..all those extra hours to build Pinhead
Sorry to hear about the job hunting, but there is an upside..all those extra hours to build Pinhead  Thanks for the update
Thanks for the update