
Took the G-Bot outside for the first time with him fully built up... Nerve racking to say the least...
The bad new: He ended up off the driveway in a ditch tipping JUUUUSSSST shy of going over... wheww... The control is a bit unnatural due to the lag and the way the ramping seems to continue for a time after input stops. Add to that my driveway is uneven and mildly inclined plus, my notebook seemed to be working hard. There seemed to be a com delay too.
Note to self: Do not wear flip flops while experimenting with a 300 lb robot and NEVER get the front of one under a tread...
Note to self two: Get a wireless game controller and NEVER let the cord of the current one get under a tread... Very bad...
It was much better when I got him into our street which is level. One of my neighbors drove by and stopped next to him. The G-Bot escorted him down the street for a short bit... very cool.
The good news: He DIDN'T go over and my and my neighbors had some great fun!
I'll be doing some more tweaking and practice runs today. That should be fun and hopefully we'll figure out enough to get a few Trick or Treaters going on Halloween.
ONLY POSSIBLE BECAUSE OF EZ ROBOT! AWESOME!
More video next week...
:D
Discover more robots

Irobot58's Project F.R.E.D( Friendly Robotic Entertainment...
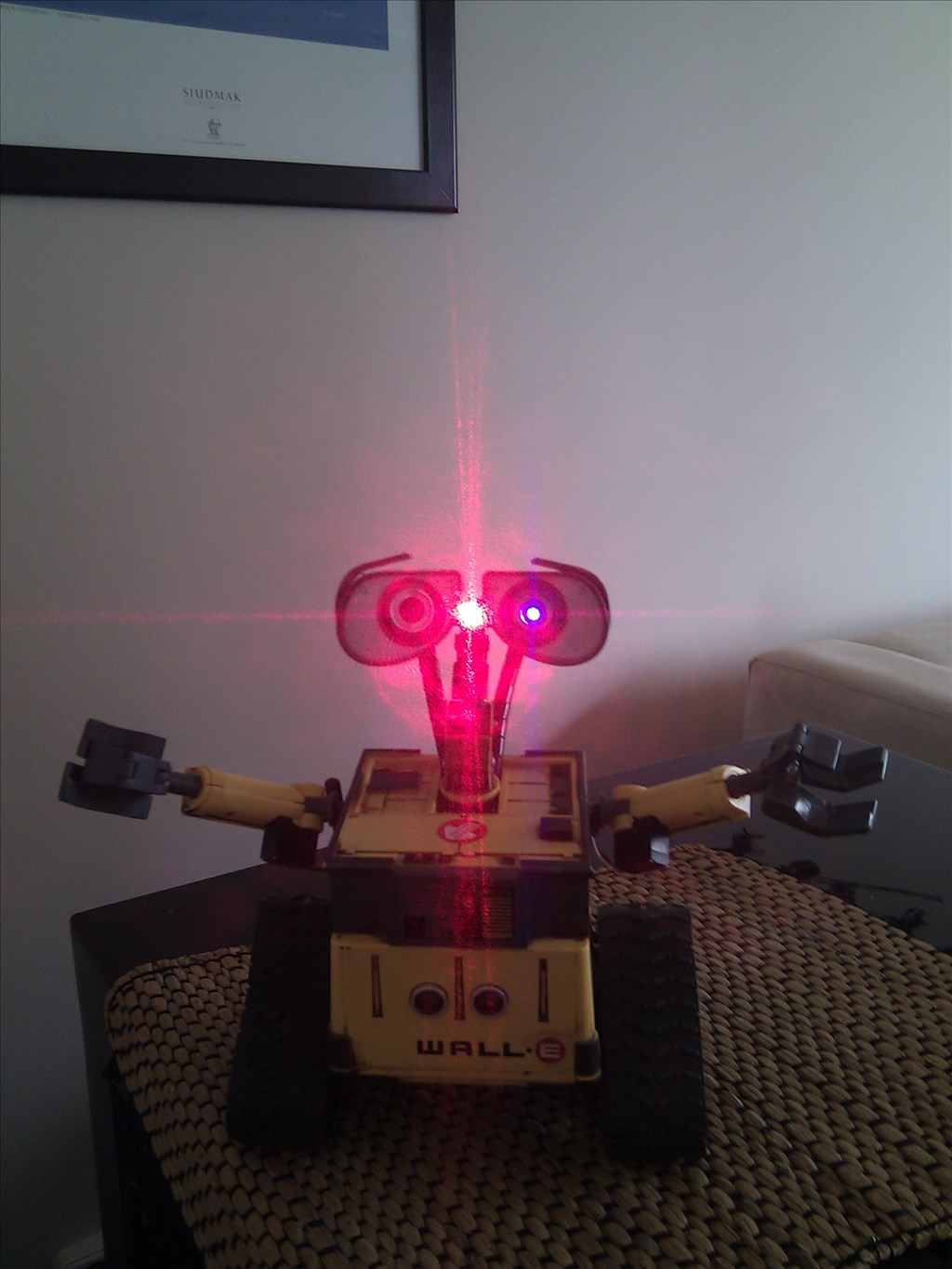
Fisha's Wall-E Wall-E From Poland - Tribute To My Newborn...


Wow, that's one awesome bot Gwen! Thanks for sharing!
You'll likely have all the neighborhood kids at your place this Halloween
Gwen, Your robot is amazing! I am awed how well it moves for being such a big unit. The waist rotation is also great. Great action. I love looking at all the cool robots on this forum. It looks like so much fun, Halloween will be even more fun. Thanks for sharing, Steve S
I OMG Gwen. That's awesome! I don't know how you keep from freaking out when he almost tipped over. I would have soiled my undies and developed an ulster before I got him back in the garage. More proof that women are tougher than men. Well done! I'm jealous. I love the way he can turn 360 degrees and on the move too! I gotta get my big guy mobile now after seeing this.
Outstanding! Great job!
WOW!
I'll take another look at the ramping code when I have more time, I'm sure it can be optimised somewhere which may reduce the lag you experience.
One thing I did think earlier about the script is I didn't use any control commands to stop the script when direction is changed or when the joystick returns to the centre. I don't think it will make much difference if any but that's at least one place to tweak it to make it better.
The lag may be due to the ramping speed sleep too, I'll have a look to see if it does introduce a lag and if it can be done a different way to avoid or reduce the lag.
Looks great though!
@Dave Shulpius the video IS heavily edited... I failed to mention that just maybe I had to change when I came in... Lol...
@Rich Any enhancements are welcome but PLEASE understand how GRATEFUL I am for what you've done thus far... You made it possible for me to meet my commitment to the local robot fans! THANK YOU, THANK YOU, THANK YOU!
Gwen
Bummed I couldn't get the neon working for Halloween. The trigger circuit doesn't seem to be working anymore. I've tried a ground loop isolator, rewiring all the components to common power and ground, changing the frequency input range and tweaking the input sensitivity... No luck. The tubes and power supply are good. The neon will light but the trigger just won't do it...