






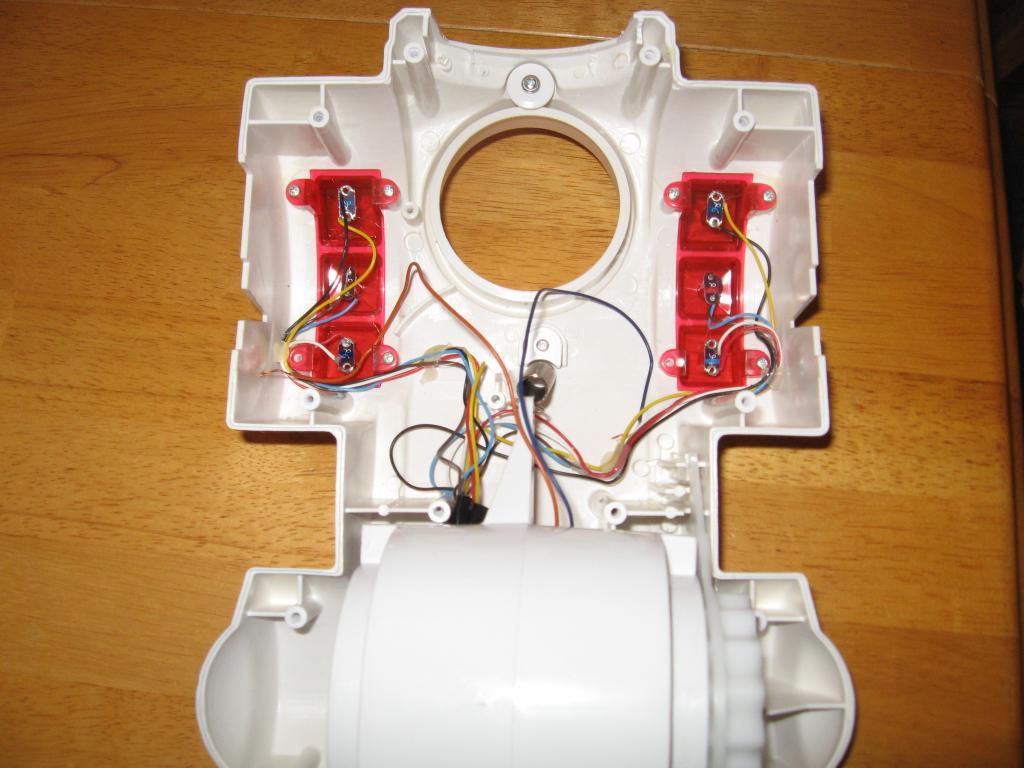






Hey all. I was really excited when my EZ-B arrived about a week ago. While it was on its way I was searching around for my first project. Thanks to DJ's great website and Ebay I found what I wanted. I picked up a RAD 2.0 for 15 bucks. It did not have any remote or battery charger (so what). And today I started on it! I hope to post my progress here and open to any ideas you all might have. As you can see I wasted no time before I opened it up!
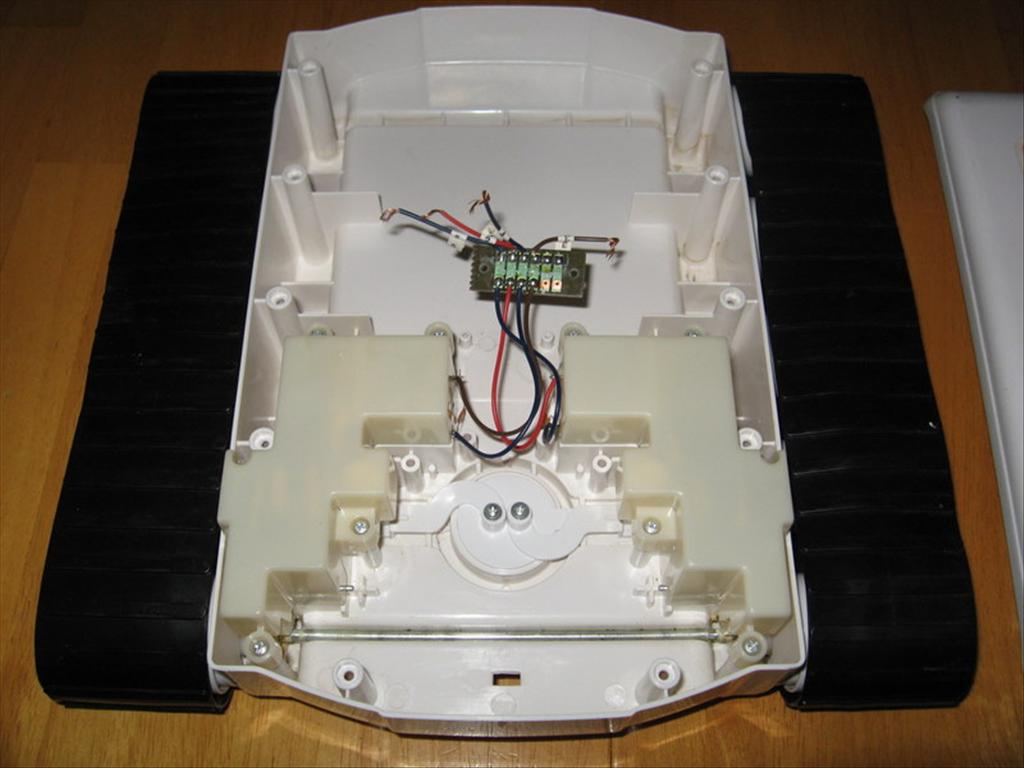
The RAD 2.0 has what looks like a decent track base with motors and gear boxes (a bit loud when I tried out the motors). It has a physical gearbox selector switch for High and Low gearing (I will need to put a servo on that) which will be cool to mess with. The interesting thing about this guy is that he bends at the waist. He also has two arms that work together to grasp an object. It looks like can bend all the way over and pick up an object on the floor (we shall see). After opening it up I noticed it appears to be a decent thing to start modding.
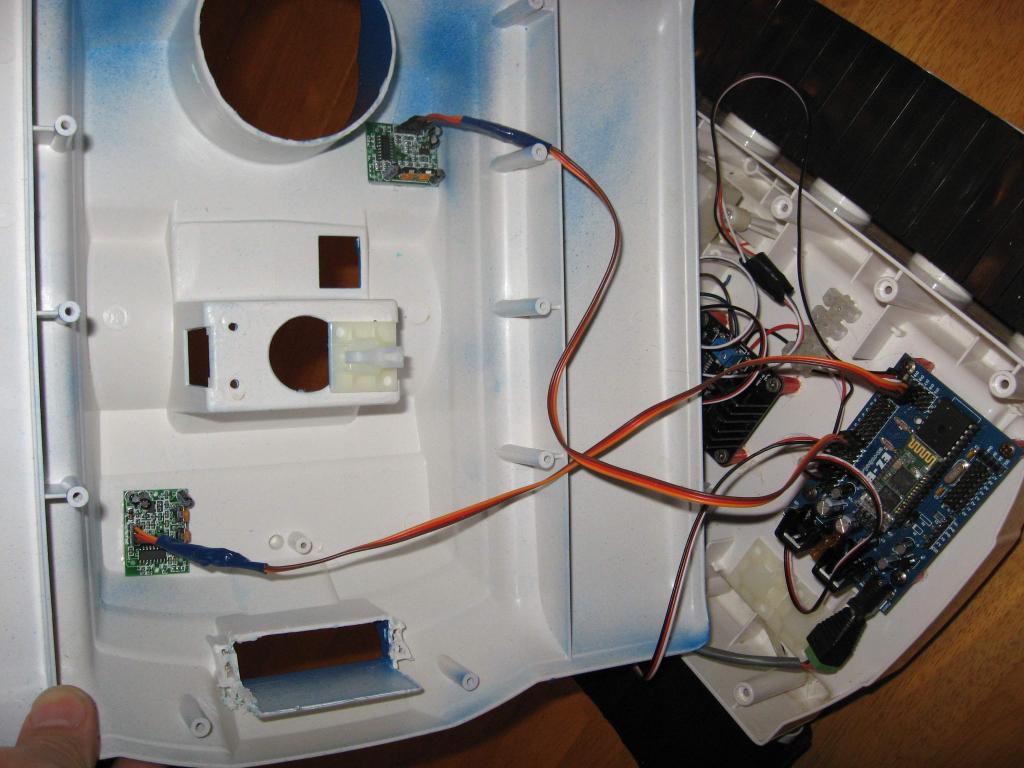
I have an H bridge on the way for the track motors and I probably going to need another if I want to use the existing motors that control the waist and arm movements. I am thinking of putting in a accelerometer as well so when the bot goes up or down hills it could stabilize itself automatically! It will surely have a distance sensor...just not sure where to put it yet, camera, and probably go with an MP3 trigger. You may notice the circle on his chest...The original toy was remote control and could fire nerflike darts (pretty neat). Not sure I will keep that functionality as I am thinking of other cool gadgets to hook up to him. Tonight I tackled the head movement.....I will post more on that later.....
Kevin




Discover more robots

Rz90208's First Look At Fud2
Grimjack73's The Presentation Piece


Hey all. My wife let me work on the Robot this weekend! The kids work as a great excuse for me! Anyway here is a video of the latest progress. Open to suggestions/recommendations as always. I was planning on putting the EZ-B the head but with all the wires, I am now thinking about moving the EZ-B to the base. I will have to 'cut more plastic' and may loose the Cheesy Tray "Cheese Tray" that the RAD can carry around...but oh well...sacrifices may have to be made....
:)
Hey everyone,
Work has been going on here over the Christmas break!
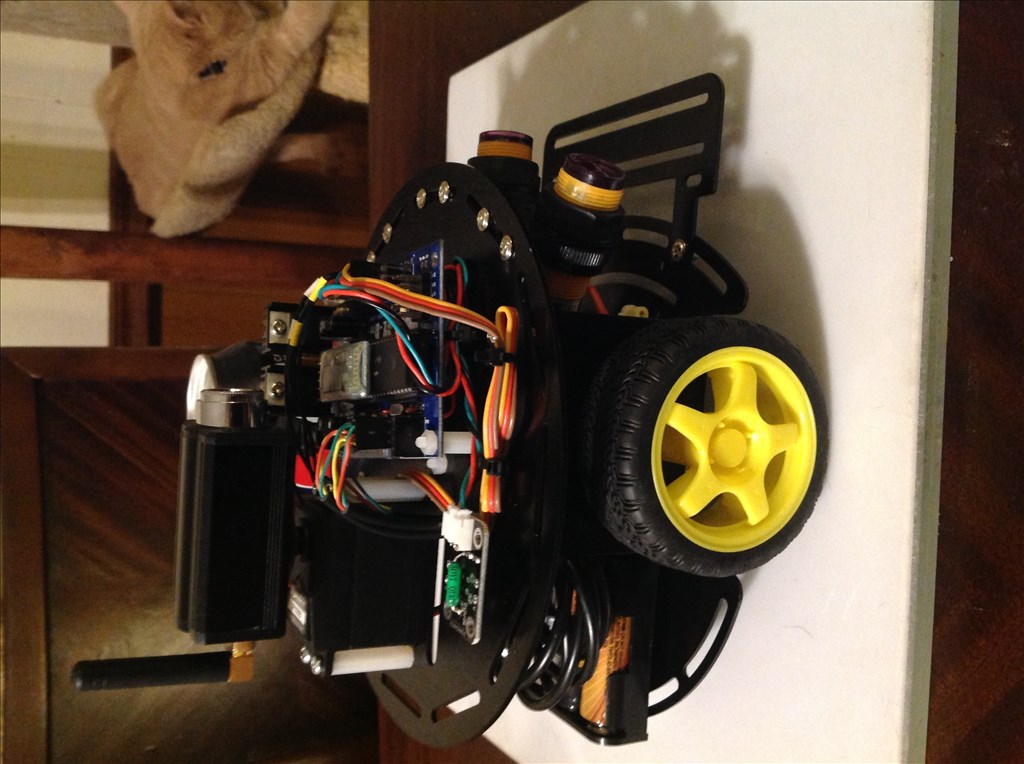
We have named our bot 'LEGION' and he is coming along nicely.
I have added a cylon eye or Larson Scanner kit: evilmadscience
I also added a Pololu qik dual serial motor controller which works very nicely so far for control of the waist and arm motors: qik controller
I also added some chest LEDs to liven LEGION up a bit.
Next up will be an accelerometer so I can see how far over LEGION is at any given time and a camera (mounted on the side of the head with a Y axis servo).
And for my latest Video:
This stuff is addicting! I am having a blast and so are my kids!
v/r
Kevin
I love Legion! He is really COOL! What type of run time are you getting out of the RC car battery? What H-bridge are using for the drive motors? So many questions, so little time....
Hi bret.tallent,
Thanks! I just finished adding the wireless camera. LEGION is a work in progress. As for the RC battery. I don't know quite yet but will keep you posted. I have been doing so much testing lately I am not really sure. As for the H Bridge. I used this one:
2A H bridge
It is from DFrobot and was only $17 bucks. I am no a budget so I am always looking for deals. Because it does not have a dedicated control in the EZ-B software you do have to set up a simple movement script to control it. Takes 4 Digital ports to control it. Two for motor polarity (FWD/RVS) for left/right motors and two for left/right Motors on off.
I also went with a serial motor controller (qik controller) and the link is above for the waist and arm motors. Works great... I really like this controller as it only takes 1 Digital port for serial comms and it supports driving motors with 1A continuous 3A peak.
Looking forward to seeing your projects...and some day a East Coast get together!
v/r
Kevin
That's the motor controller I have! Glad to hear it works well. You'll have to let me know how you wired it up so I can do the same. Can't wait for the East Coast get together either!
Hey bret.tallent,
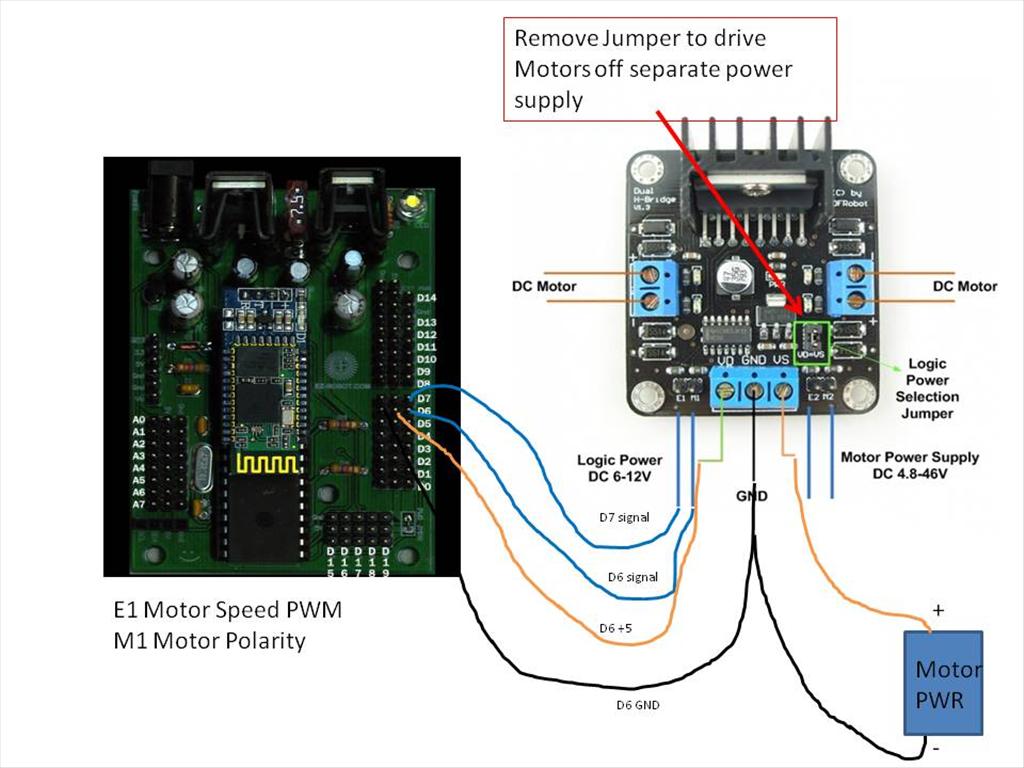
sorry for the delay. The 2A H bridge (from DFRobot) is really easy to set up. Here is a jpeg i threw together that shows how I have mine wired (one side only).
Version 2.0 of graphic (corrected)
Note: You need to remove the jumper...so you can run your motors off a separate power supply.
E1,E2 is motor speed M1,M2 is motor polarity (setting high changes motor direction)
I am using the set command right now for movement. 4 commands for each script:
Example Right Turn script:
Set (d6,off) # sets polarity left motor off (forward direction) set(d8,on) #sets polarity right motor on (reverse direction) set(d7,on) #turns on left motor set(d9,on) #turns on right motor
You are supposed to be able to give E1 and E2 PWM. I have not messed with that too much yet.
Hope this helps you get going.
v/r
Kevin
Kevin, on your drawing the D7 and D6 signal is pointing to +5 and the D6 +5 is pointing to Signal
This is fantastic! Thank you Kevin and DJ!