

For quite a few years, i've been mentioning that I have been working on a positioning system for ez-robots. I guess it's time that i share my tribulation with you, because the trails were far too many . Should be ready to throw in the manufacturing facility for this summer's scheduled releases
. Should be ready to throw in the manufacturing facility for this summer's scheduled releases
By DJ Sures
— Last update
Other robots from Synthiam community
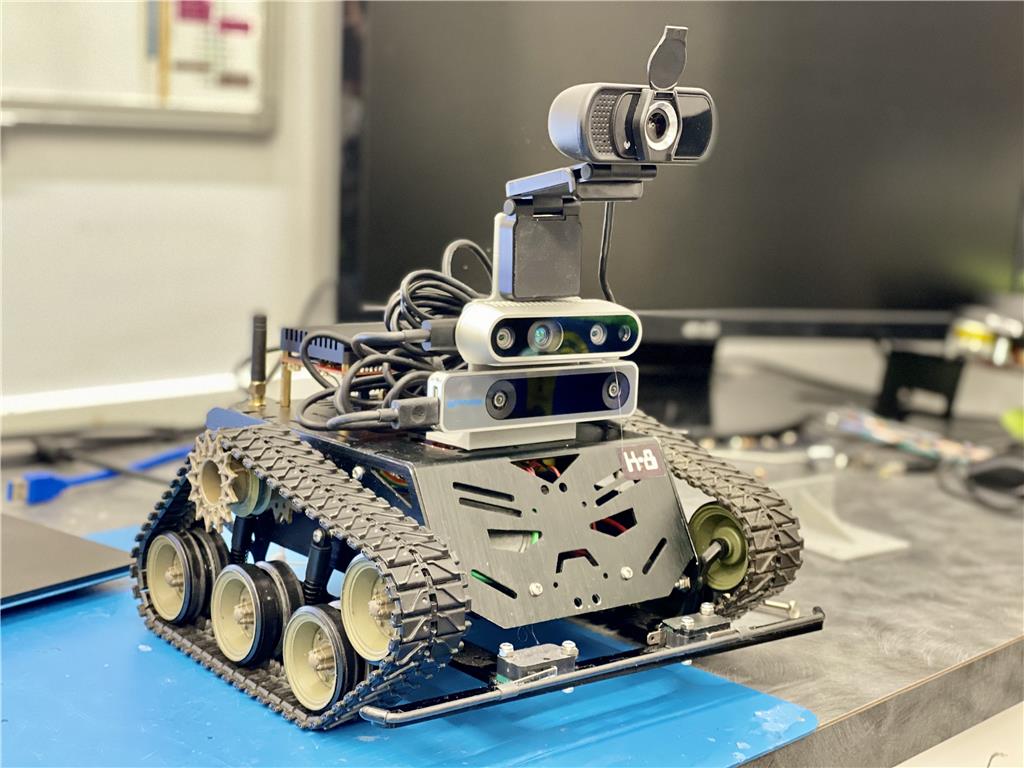
DJ's DJ’S Test Platform (K8)
Synthiam ARC test robot: Devastator tank with Rock Pi/X, Sabertooth+Kangaroo, Realsense D435i/T265 for autonomous...

Jamerperson's BRAD (My First EZB Robot)
Voice-activated rolling robot, ezb-powered: mic, random-note speaker, ping collision sensor, moving arms/torso, head...
Justinratliff's Jd Backpack
JD backpack mockup anchors into JD's middle slot with male clip, two top posts, dual rear mounts, wire access and switch...

@DJ Just when I think you don't care about us annoying diy'ers you go and do something like this... You pulled another rabbit out of your hat.... this is fantastic you just might have out did yourself this time... Seriously good work...
Seriously good work...
Just shut up and take my money!
You know of course, by showing us this tease you have set yourself up for numerous posts about "when will it ship", as well as technical questions. In fact, I'll get some technical questions/suggestions started right now....
Can we identify known obstacles on the "map" so that when you tell it to navigate, it will attempt to go around them? Along similar lines, if we have obstacle avoidance (Ping/IR) will it continue trying to get to a destination as the avoidance works its way around obstacles?
Can you have multiple sensors in the same project so you can track a robot as it goes from room to room?
If you have multiple robots and sensors (in different projects/ maybe different PC's) can it distinguish between the transmitters so each robot can be individually tracked?
I assume it goes without saying that we will be looking for variables and control commands to integrate this into navigation scripts.....
Alan
@dj Looks great! Looking forward to it
Frank
Great test DJ.
That's fantastic DJ! Dido to what Richard and Alan had to say. Where do you and your crew find the time with everything else you are doing? I'll add it to my shopping list of new products.
Thanks everyone
Alan, as usual, you're correct with assumptions.
as many ips can be added as you wish. They can overlap a well, such as for doorways between rooms or within large rooms. The view is about 170 degrees with special lenses.
way points are defined. So you specify target way points like your gps works. The way points can be stiff like "door way to kitchen" or "living room sofa", etc
as for navigating around obstacles. You highlight areas that the robot cannot drive. These are red zones, and the robot will never go there, such as sofas, walls, etc
you can also simply just click or use ControlCommand to add temporary way points, like I did in the video
As for availability, ezrobot seems to have the best time throwing items in the manufacturing hopper near end of summer (early fall), such as we did with the /2 and IoTiny. All the new products that we have in the store will be popping out at the same time, including this.
They will be priced at less than $100 usd. The best suggested mounting place would be the top corner of a room where it can see everything. Otherwise use a tripod for portability.
The ips also has 8 digital io, audio and 2 adc... because half of the device is actually an IoTiny . The other half is the ips.
. The other half is the ips.
Horay for the IPS . You said you would do it and at last its here. I have no clue about when you find time to sleep. Thanks DJ for coming thru.... We will all be patiently waiting for the release.. We know its here...
@DJ Re-post #9.... You have seriously out done yourself man... I am speechless (if you can believe it)... This is huge.... Microsoft cognitive services and now this? Why is anyone using ROS?