
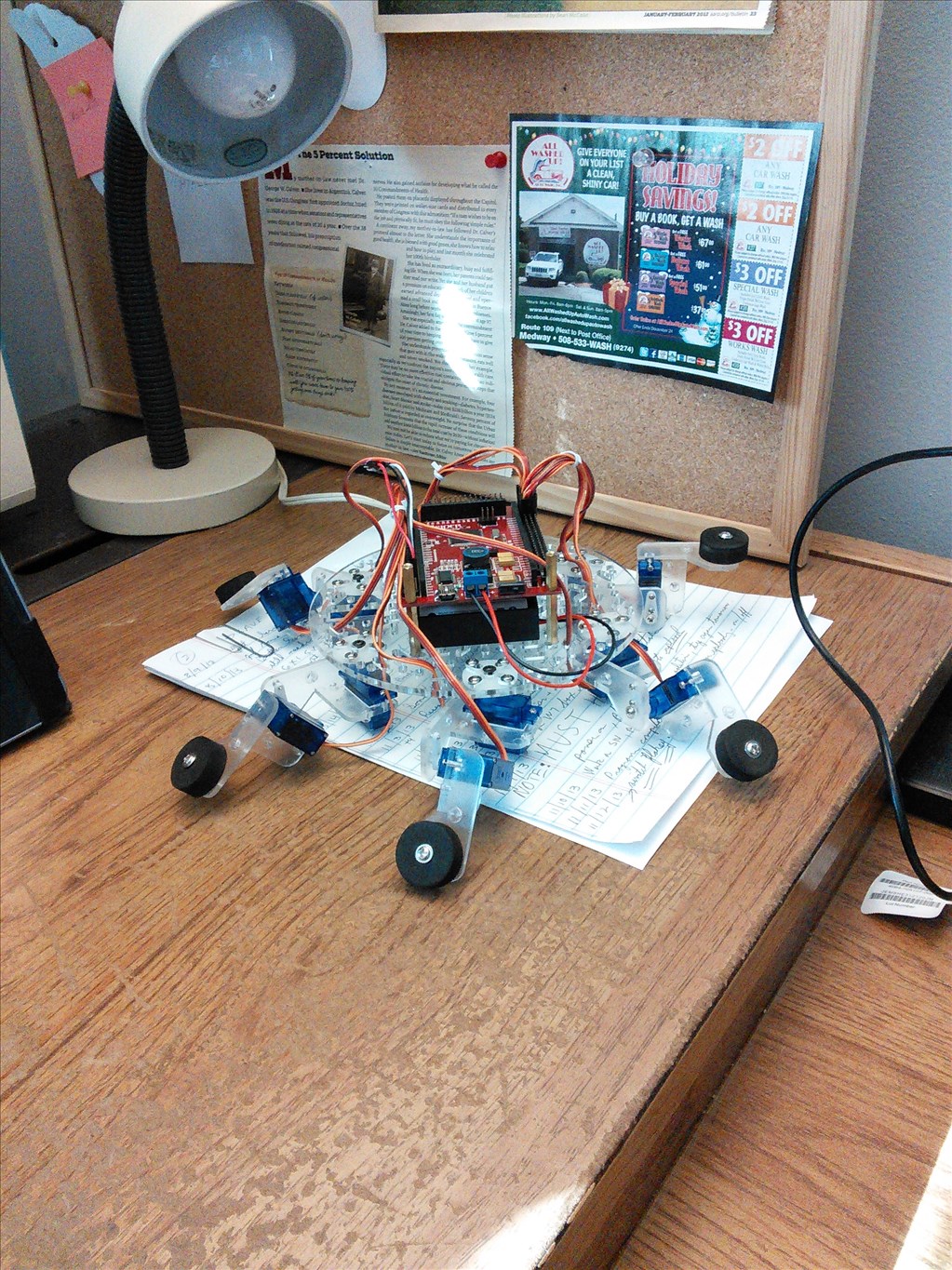
I've eventually got around in completely rebuilding my Hexapod ( Ziggy ) using the HDD Servos, after I completely disassembling it a couple of yrs ago to use parts on my InMoov.
The new HDD servos has definitely stopped ALL the servo buzzing under load. This Hexapod is made of metal and with 20 Servos and other parts like batteries it make it extremely heavy.
I lost all of my Scripts for this Hexapod on my old laptop, so I have had to start scripting again from scratch. Before I had a number of walking Gait scripts ( Tripod, Wave, and Ripple ), but at the moment I've only completed this Wave gait, which is the simplest of the gaits to do, but its the slowest gait and not very elegant!
See youtube clip.
By cem
— Last update
Discover more robots
Djandco's Djandco's Wall.E
EZ-B Wall.e arm mod using small Arduino servos to retain clutch and deliver about 80 arm travel; neck servo planned.

Donesvarc's Wall-E From Czech Republic
Build a custom WallE robot with parts list, servo mods, wiring tips, cameras, sensors, LEDs, audio and power solutions...
Jdebay's Mini-Zip V3 Upgrade.
Repair and upgrade a Dagu RS024 12-servo hexapod: v3 controller install, mini-servo replacement, and learning...

Man - ziggy rocks!
Did you create the motion and gait using the Auto Position control?
Yes, for the gait I used auto position.
@cem Very well done! Smooth and quiet
Could you provide a parts lists for the servo horns and arms?
Regards,
Frank
@Frank, The aluminum servo horns I got from a chinese website and the arms were laser cut by a company here in the UK, this was about 5 or 6 years ago!
Chris.
Nice job. I like the way the distance sensor moves side to side. Is it hooked up and functional? Once my inmoov is all set up I have plans to design and make one of these.
@Holy1 Yes, the ultrasonic sensor is wired up and fully functional. I’ve written a few scripts to test it out and it works fine. I will put these into the walking gait scripts, once happy with which type of gait I will use.
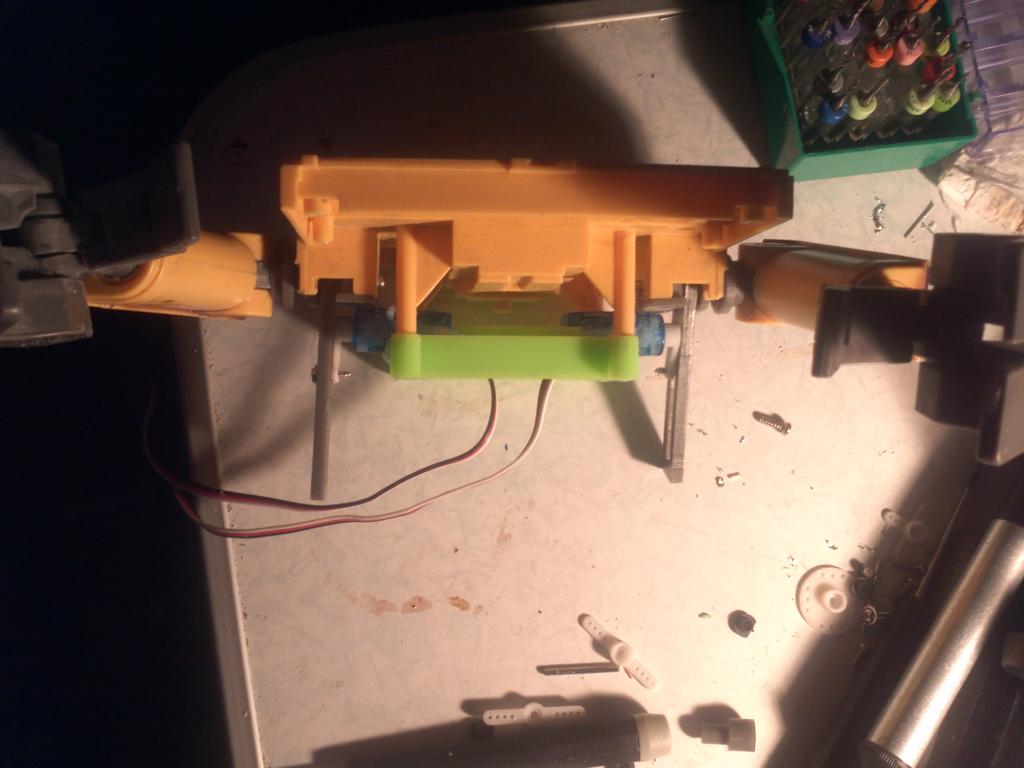
I do like the HDD Servos their GREAT, at the moment the servo moving the ultrasonic sensor from side to side, isn’t a HDD as the bracket only takes a small type servo, hence isn’t as smooth as the others! I must look at modifying it to accommodate a HDD servo.
Chris.
What a cool little creature!