
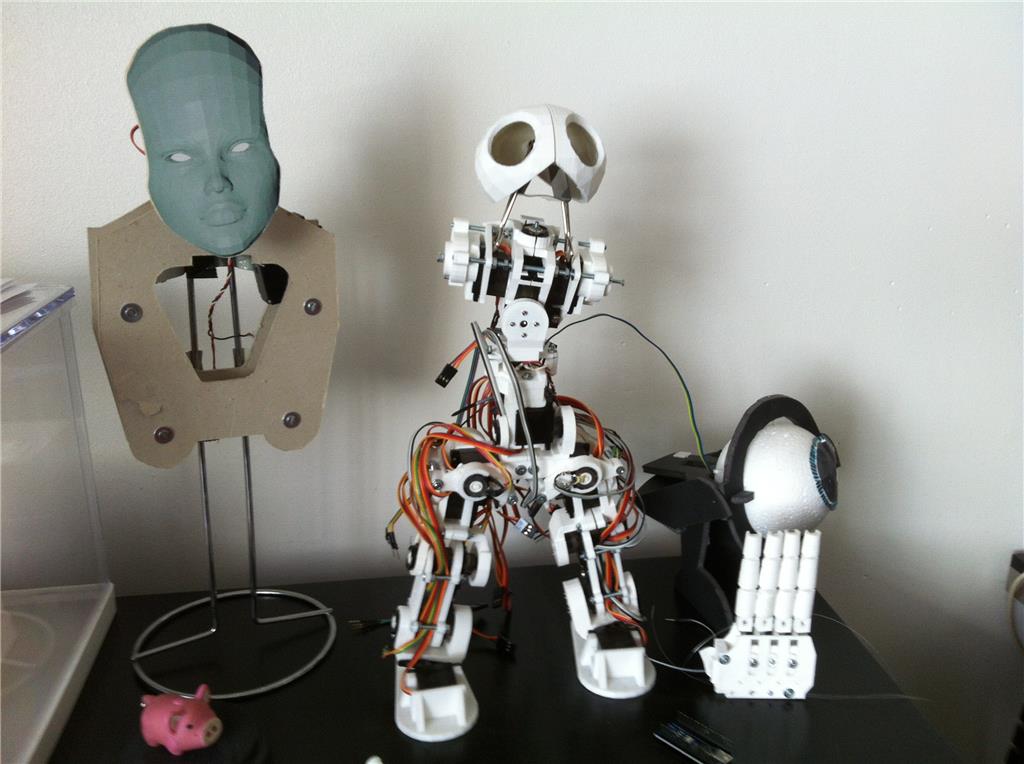
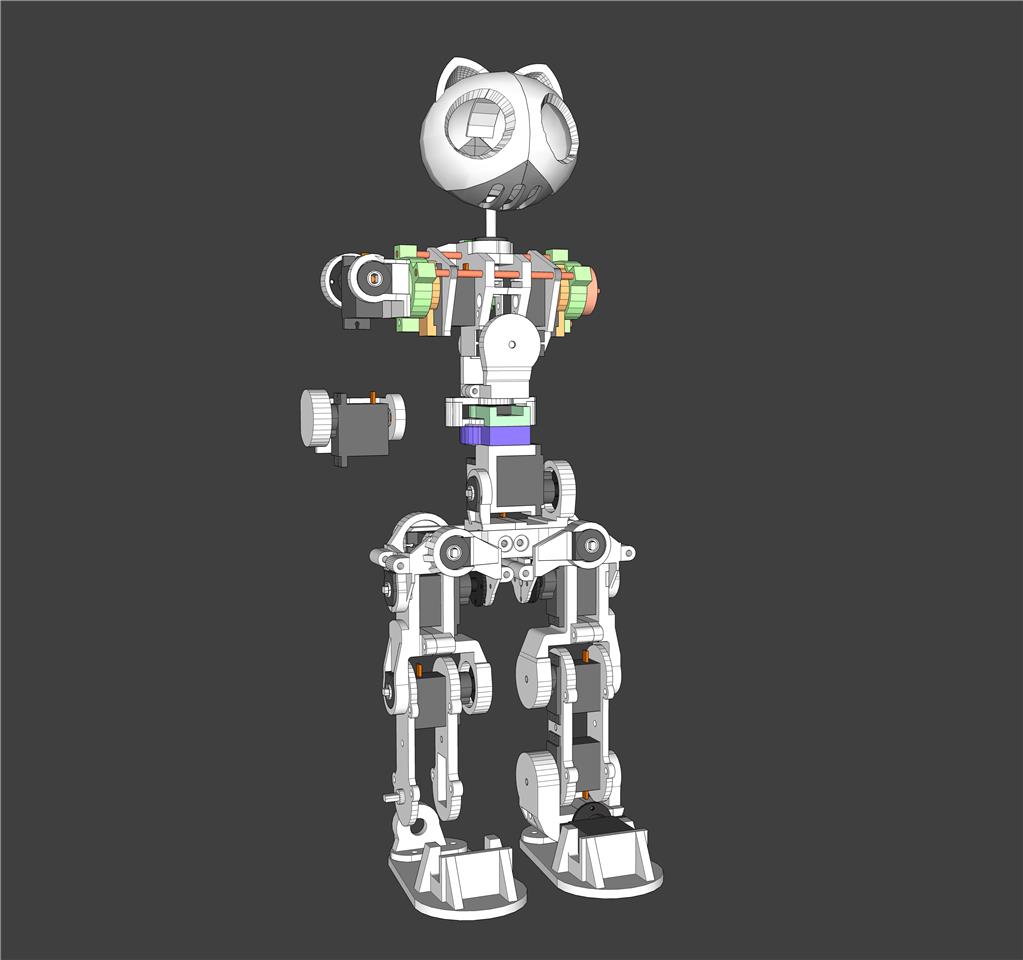
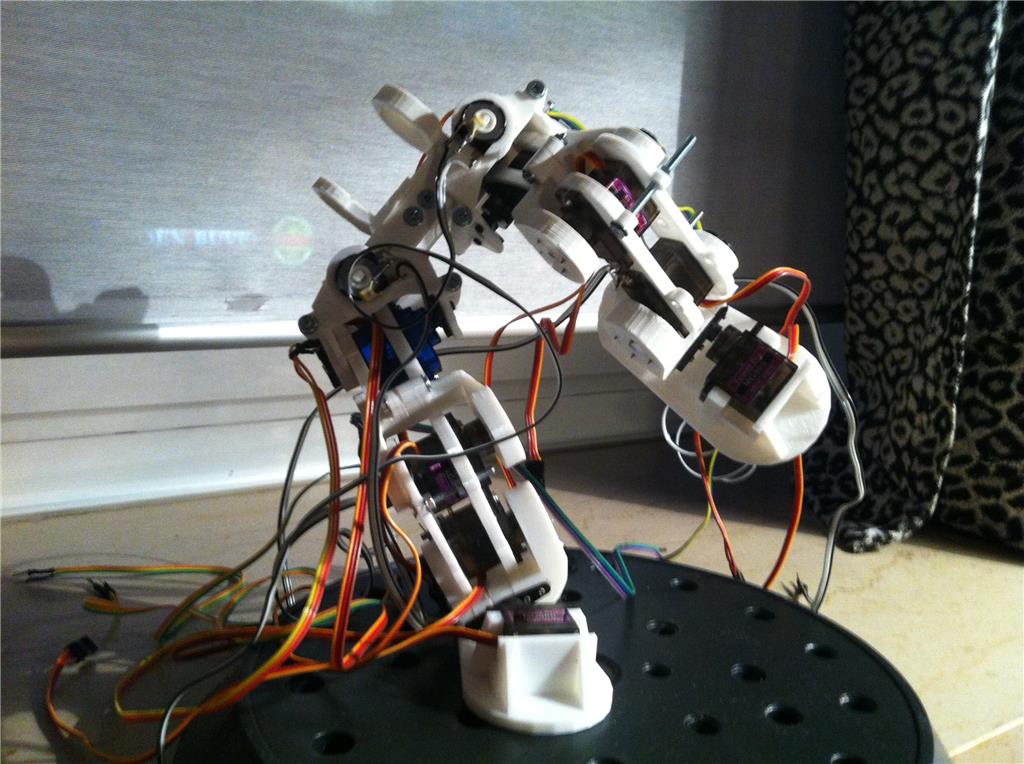
Basilio: 3d printed - 45cm walking robot with 26 axis of movement, (arms, torso legs and head). Basilio has external potmeters on all joints, I will need to find a way to connect the position data of the potmeters to the movement of the servo. In that way the robot can remember in which position you place him (posing the joints by hand) and translate this to a motion frame. EZB can possibly do this, not sure.. it is running on Pololu maestro and RPI now and has trouble being controlled. Need to find a solution... Like to have it 'running' on the EZ robot platform...
The last years I have been designing and developing several robotic platforms. These are projects that are made with 3D printing and some lasercutting (prototypes are already working on Arduino and pololu microboards.) I'm adapting my machines so they can run with EZB. I want to give them an easier user interface.
Discover more robots

Sakis33's New Project Wall -E

DJ's Hasbro R2d2 Hacked With Iotiny


Cool. Nice work.
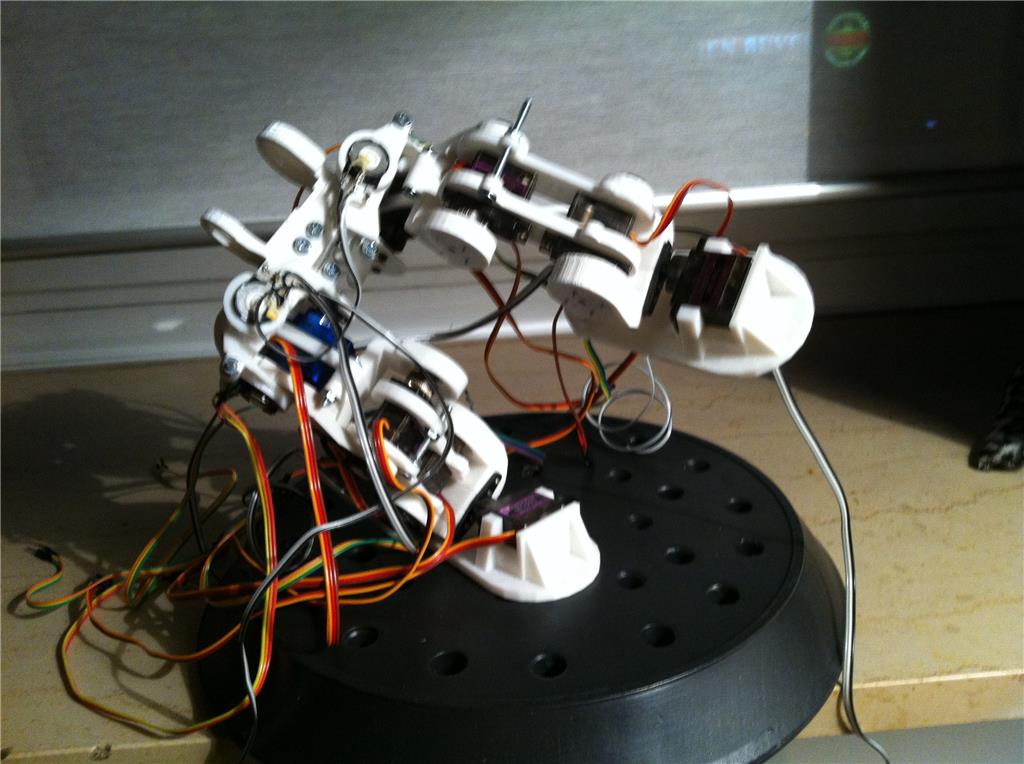
To monitor the position of the arms attached your potentiometer to the ADC port of your EZB. You can then measure the voltage change caused by the movement of the potentiometer when the arm moves. Through scripting you can watch the voltage readings and move the arm to any spot you want between zero volts and your top supply voltage to the potentiometer.
Again...sweet setup! A lot of work to design something like that!
Awesome!
Awesome bro.
like it very much.