
















-635425708661417124.jpg)

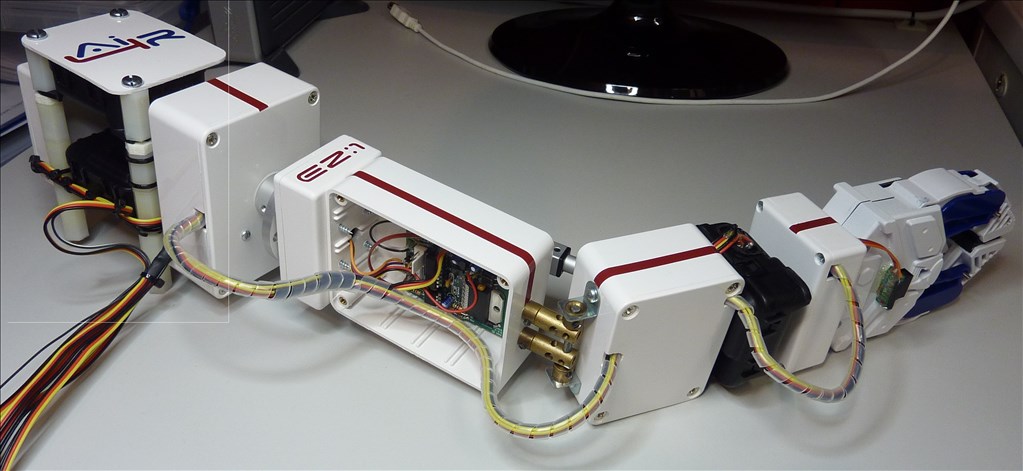
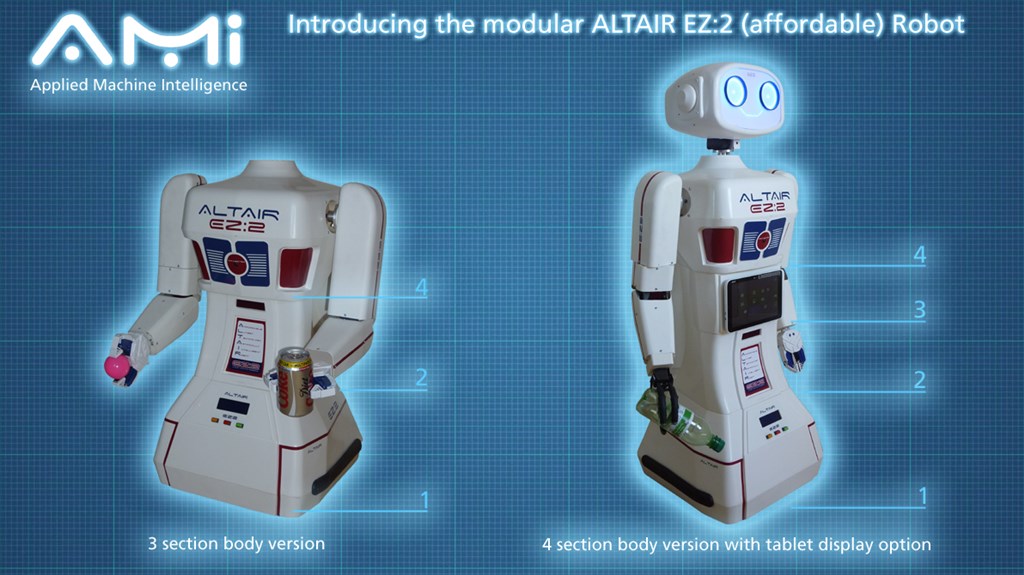
Introducing the ALTAIR (Affordable Latest Technology Artificially Intelligent Robot) EZ:2 Robot
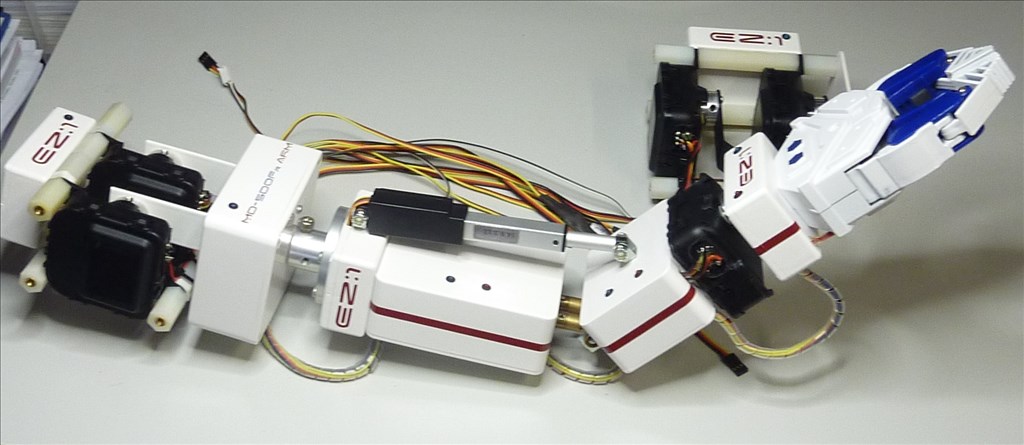
The first unveiling of the EZ;2 Robot (the commercial version of the EZ:1 Robot that has been seen on this forum) - you guys are seeing the EZ:2 first!
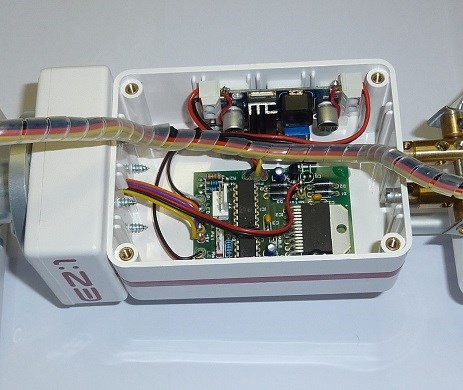
I am proud to confirm that it will have "EZ-Robot inside" and powered by the awesome V4 - well done DJ and the EZ-Robot team for making such a great product that allows robots like the EZ:2 to be light years ahead of the competition!
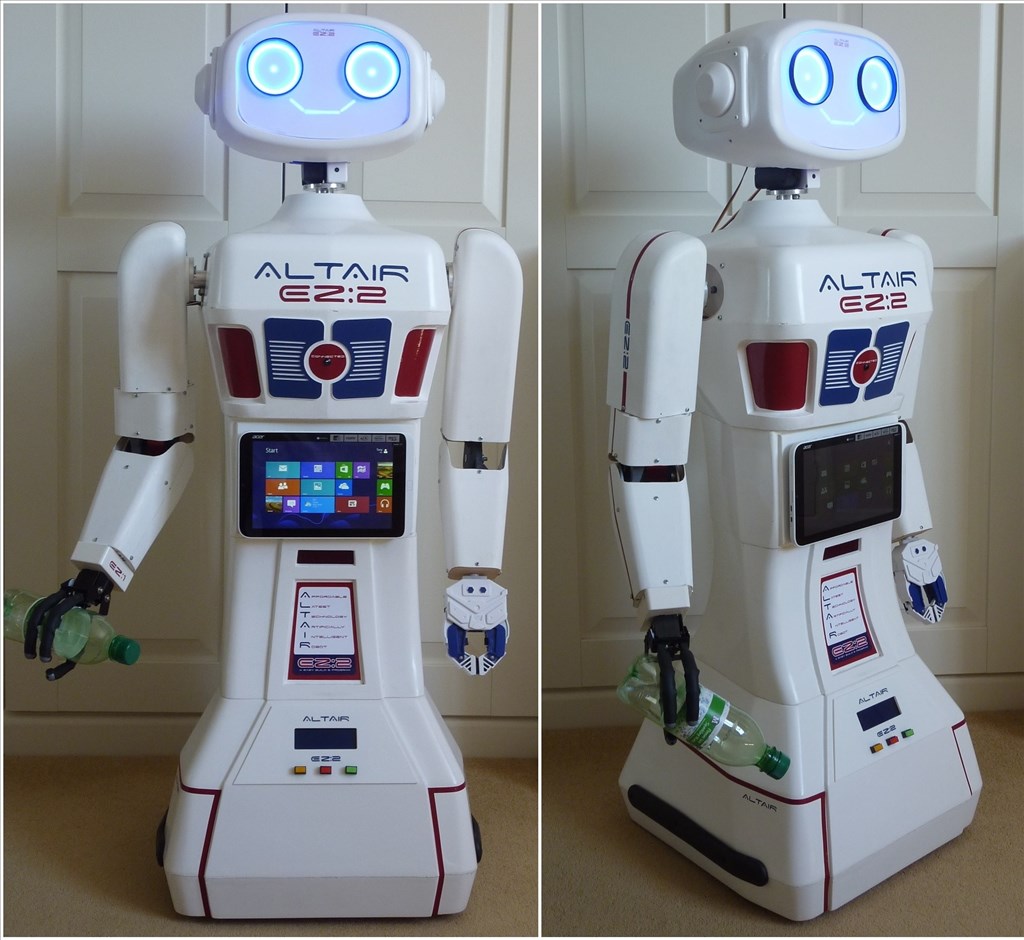
The EZ:2 will also have face and object recognition capabilities and our advanced Ai engine and will work together with the ARC software.
Because we have been waiting to design in the incredible EZ-Robot V4, we are behind on our development schedule (but it is worth waiting for) and we will now start beta testing in 2015.
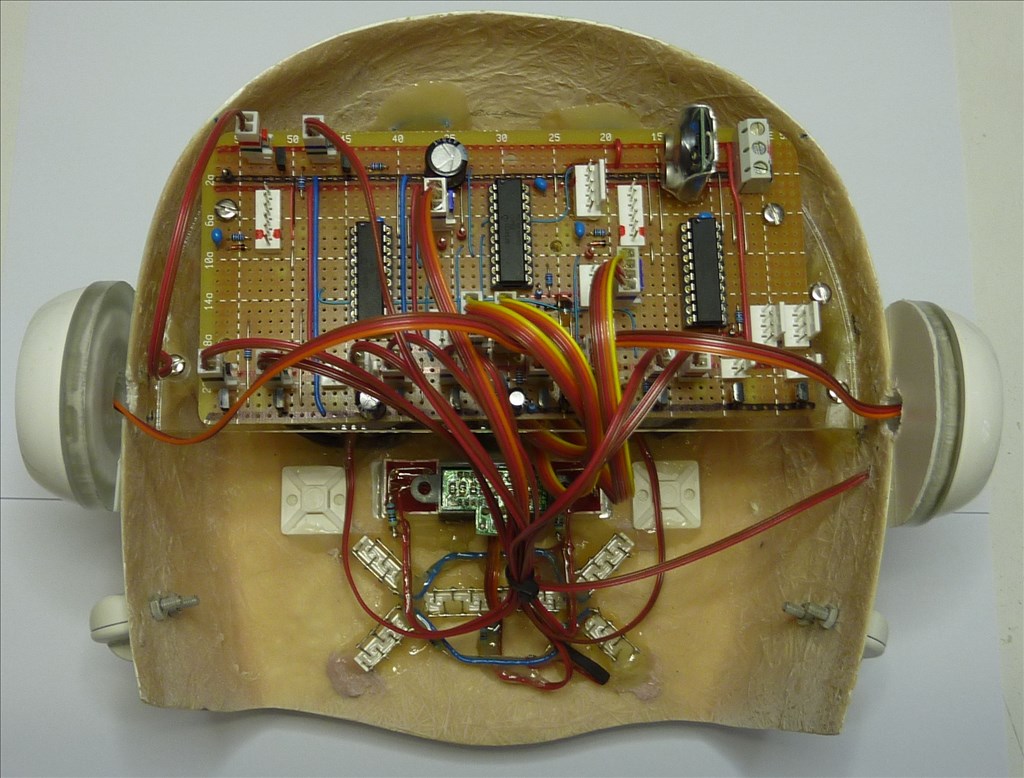
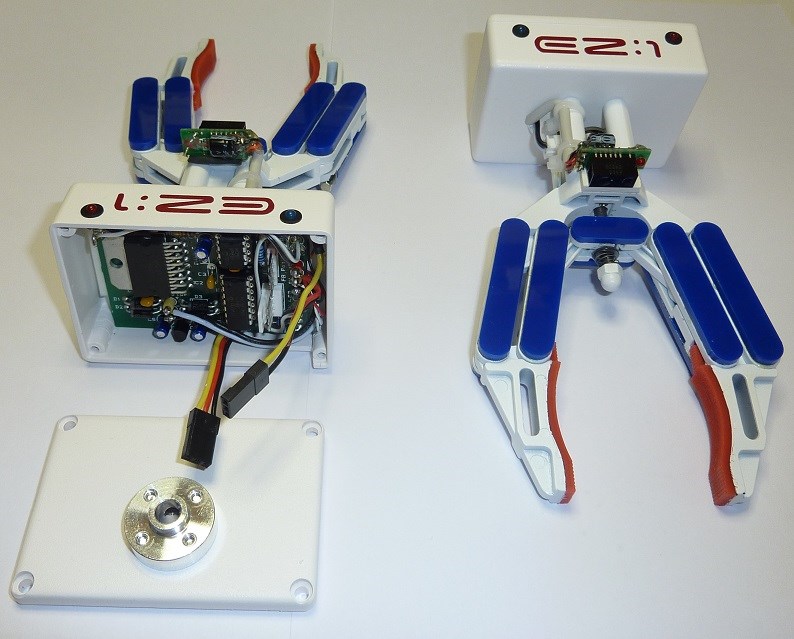
I wanted the EZ:2 to look like a robot and not a humanoid and you will see this reflected in the design. I guess not everyone will like the design, but it is practical for (low cost) mass production and because of its modular build transportation costs are reduced.
Hope you all like the EZ:2.
Tony
Discover more robots

DJ's Scarab Creepy Robot

Perry's Mini-Move Project


This looks awesome! Great job Toymaker! My robot believe it or not sort of has the same body design. I want one now!
Tony! You did a GREAT job on that. It is aesthetically pleasing.
At first I thought it was going to be a robot based on the S-100 Bus. I didn't immediately see your name. ha!ha! an appropriate name.
Fantastic!
Wow! And I mean Wow! Those photos are amazing. Amazing work. I know we've sort of seen it kicking around the forums but, seeing it all done up and ready for the ball? Breath taking. I can't compliment it and you, enough.
That is really cool! I cant wait to see you get this off and running in peoples homes.
Well done you did an excellent job I can't wait to see videos of it in action
i like it except for two things.different arms&elbows. and continu smilling mouth.you cant ad emotions like sadness. what you mean whit low prize?
Absolutely fantastic! So Tony, are you bringing this to market after the 2015 testing? Any idea what it might cost? I can't believe it, but I would seriously consider buying one from you... Beats re-inventing the wheel as it will allow me to concentrate on programing instead of design and construction...