
















-635425708661417124.jpg)

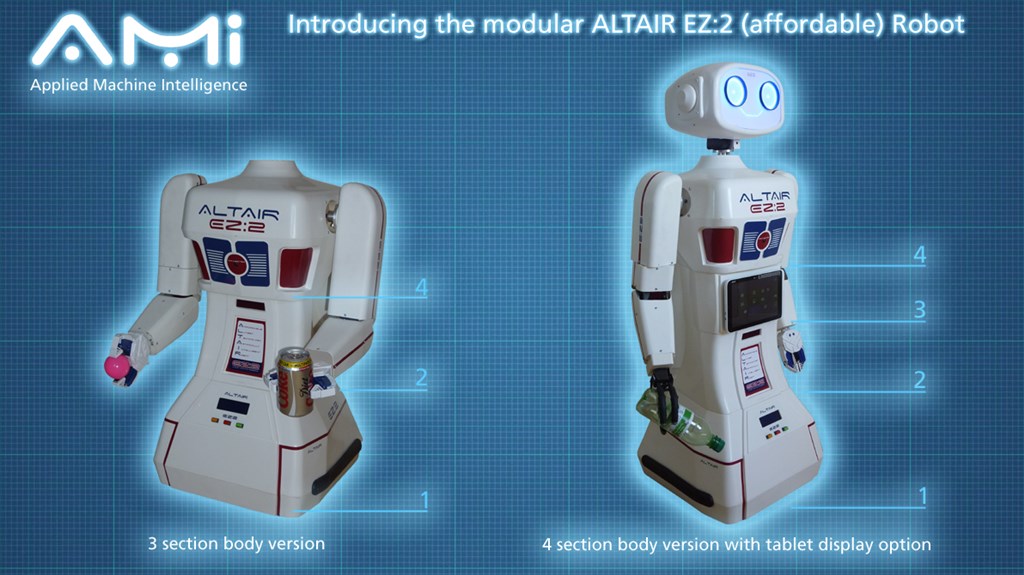
Introducing the ALTAIR (Affordable Latest Technology Artificially Intelligent Robot) EZ:2 Robot
The first unveiling of the EZ;2 Robot (the commercial version of the EZ:1 Robot that has been seen on this forum) - you guys are seeing the EZ:2 first!
I am proud to confirm that it will have "EZ-Robot inside" and powered by the awesome V4 - well done DJ and the EZ-Robot team for making such a great product that allows robots like the EZ:2 to be light years ahead of the competition!
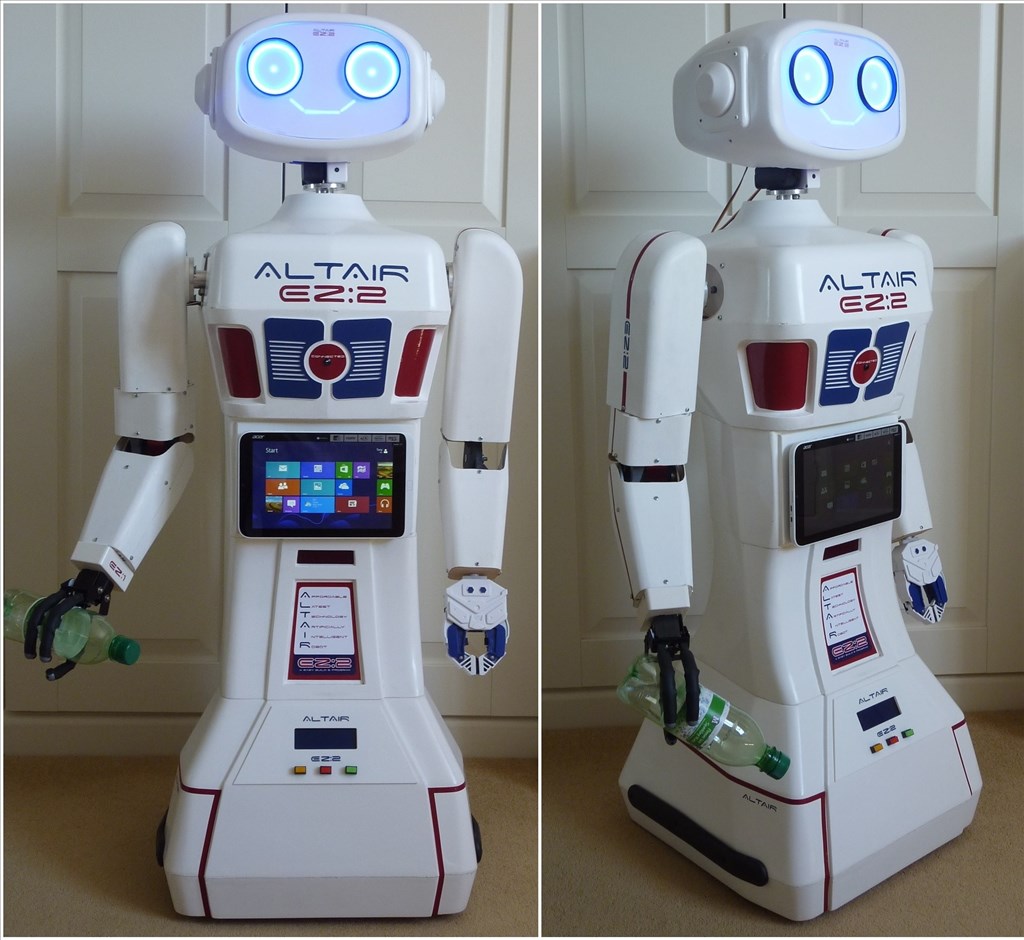
The EZ:2 will also have face and object recognition capabilities and our advanced Ai engine and will work together with the ARC software.
Because we have been waiting to design in the incredible EZ-Robot V4, we are behind on our development schedule (but it is worth waiting for) and we will now start beta testing in 2015.
I wanted the EZ:2 to look like a robot and not a humanoid and you will see this reflected in the design. I guess not everyone will like the design, but it is practical for (low cost) mass production and because of its modular build transportation costs are reduced.
Hope you all like the EZ:2.
Tony
Discover more robots

Jdvann's My Dog

Kkeast's Its Gonna Be RAD


Hey Tony! Glad to see the EZ-B v4 arrived safe and sound and is ready for that wicked EZ:2 We will be keeping a close eye on your work
Tony, What a fantastic robot! You had me interested in all it's features before but now it's a great looker as well!
I have an Emiglio, waiting for it's EZB,I was thinking I would change it's head, but the kids won't let me because its got a goofy smile. They love the EZ2 too! Family acceptance will make it much easier to sell.
Put me down for one! Beta tester or whatever!
Great job...
Ps. Any videos?
Tony Thats amazing ,well done ,very futureistic You are right on focusing on the educational market initially ,it has been proven that pupils interact much more with a robot than their teacher in trials carried out in South Korea. I think whenever you have your official launch you better have one available for everyone in the audience.Best of luck.Can only imagine what's under EZ:2 covers
Pat
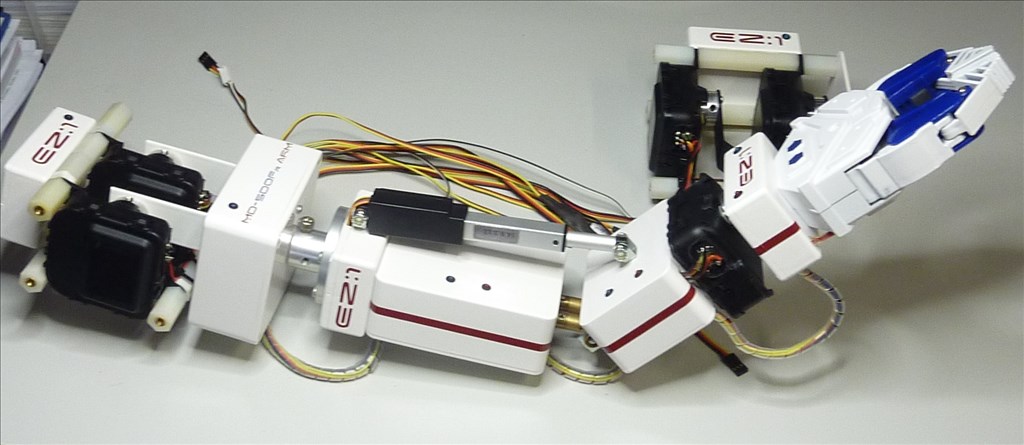
@zackarybay, thanks for the comments, no video's yet as most of the EZ:2 tech is still being tested on the EZ:1 robot development platform (the AIMEC body version).
Thanks Pat for the kind words.
Tony
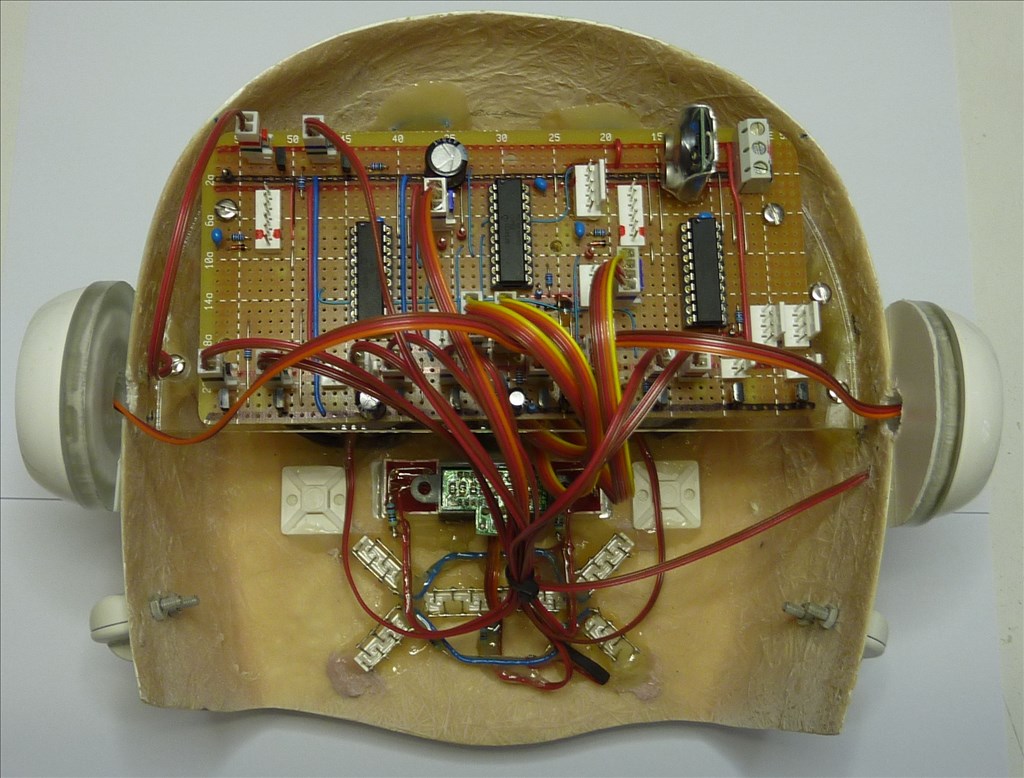
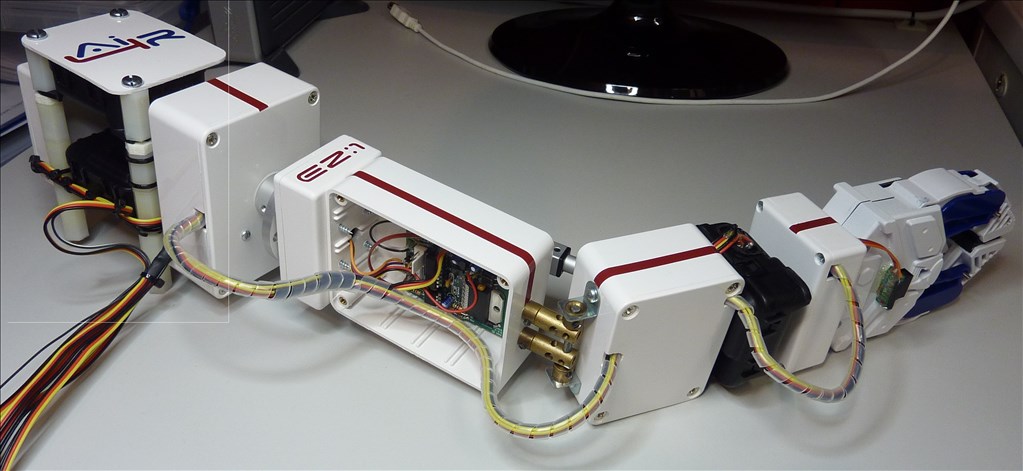
Further to my other threads on the Kangaroo, I though some of you might be interested in the slave locomotion PIC processor (to the V4) and its teach pendant. These "overseer" processors are very useful as they take a lot of the robots mundane tasks away from the V4 so it can do more important things.
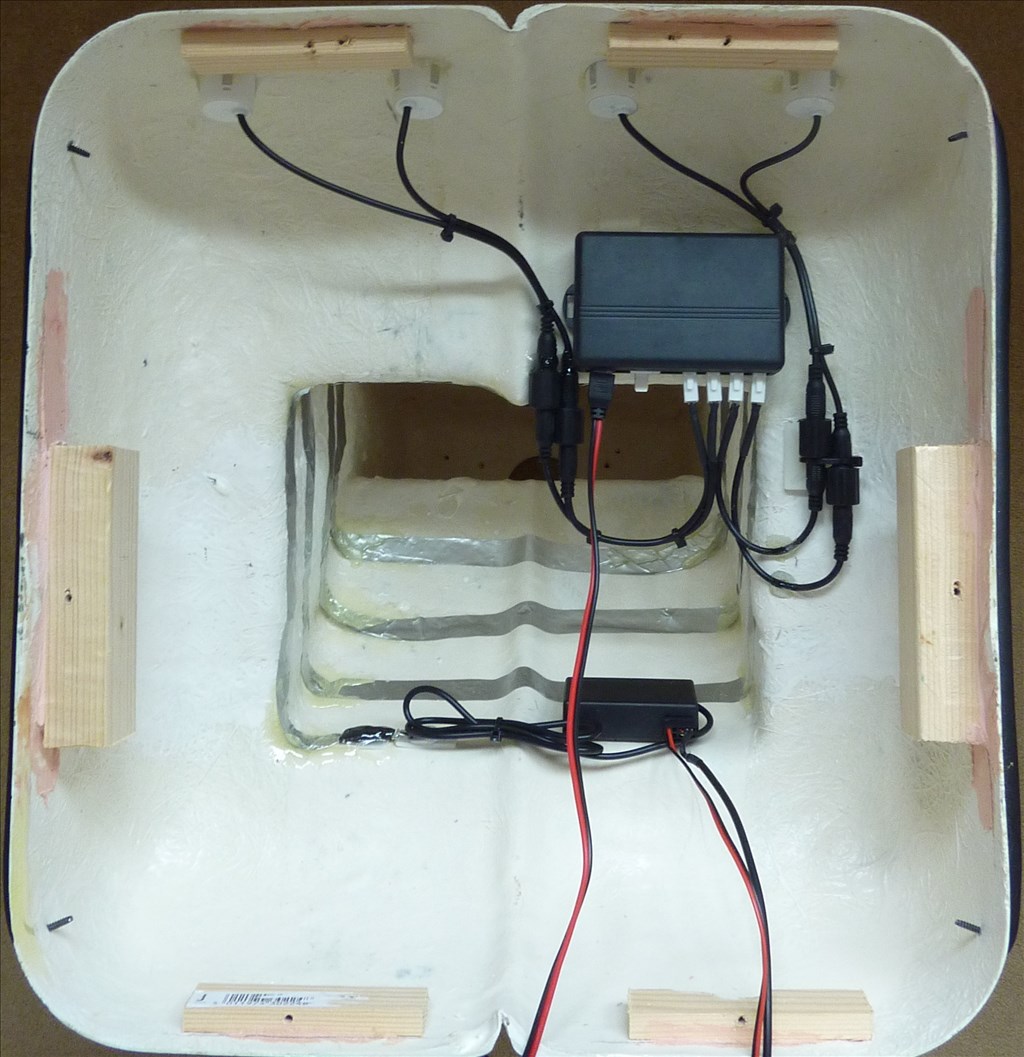
Thanks to the Kangaroo/Sabertooth setup the locomotion system moves incredibly accurately and in a straight line, this is pretty cool as it means that the robot can be taught to move from place to place (room to room etc) in predefined routines that the V4 can call. For example "charging pod to kitchen" or "charging pod to hall" etc, with this type of system you have to start at a known place and the Charging pod is good for this as it is the EZ:2 Robots little home base. For this to work you need some serious odometry and thats were the motor encoders and Kangaroo come in, with 63500 pulses per wheel revolution you can see why its pretty accurate!
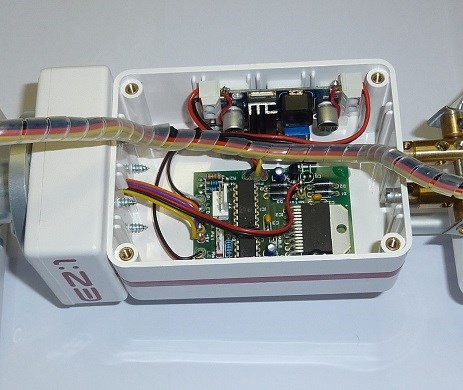
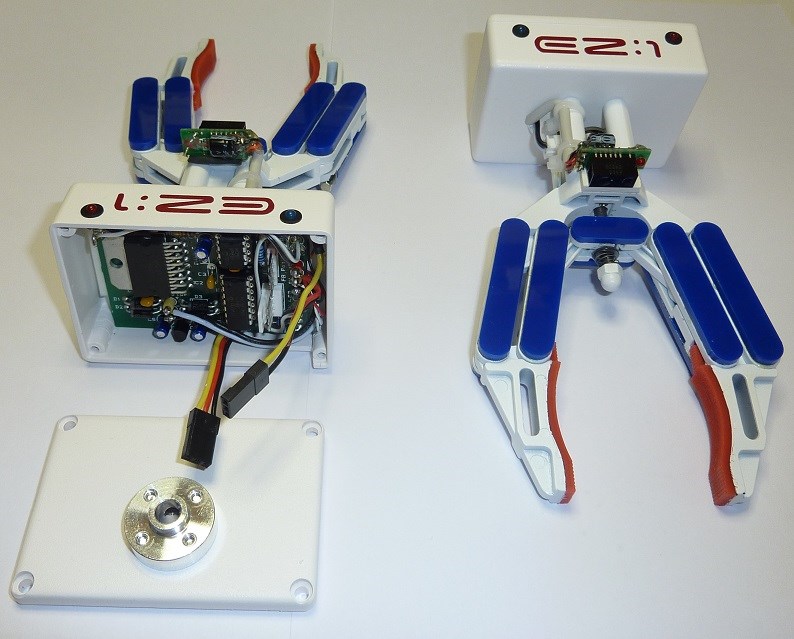
In the above picture you can see the wireless teach pendant, due to the high accuracy required the PIC commands the Kangaroo to do the highly accurate turns (like 45 degrees right etc) from a single key press from the user/teacher, the joystick is there for just moving the robot around and not for teaching new journey routes. Journey routes/paths are all held in EEPROM (the 8pin IC next to the PIC), hundreds of routes can be stored here.
Tony
I'm always surprised when I read how many pulses per rotation those encoders are. Correct me if I am wrong (and this isn't an area I have looked in to much yet) but aren't encoders usually between 100 and 1000 (give or take a bit, I remembered it easier by rounding up/down).
Basically, it's accurate to something like 0.006 of a degree?
Great job tony , I'm interested about the encoders for sure. With my robots I'm playing with steppers to move in increments and a gearbox on the stepper to increase torque if needed. Can you tell me what kind of encoder you are using?
As ALWAYS ... very impressed with your work!
I too am a believer that slave pics should be employed for certain task, as to free up the EZB and computer from getting bogged down with routines.
Do you ever have plans to post the pic circuit and Hex or is this something that you feel must stay private for the Atair EZ2?