





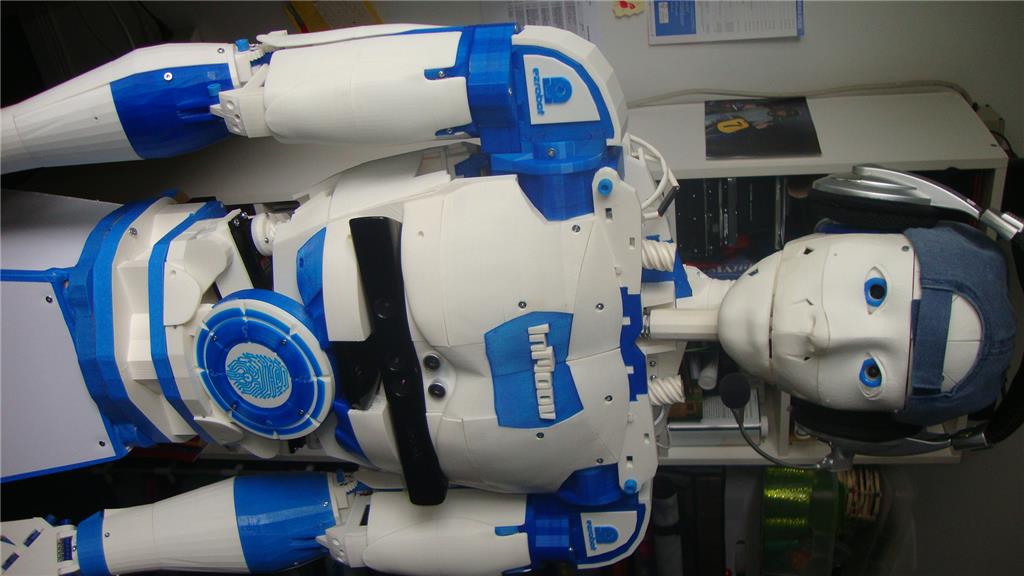
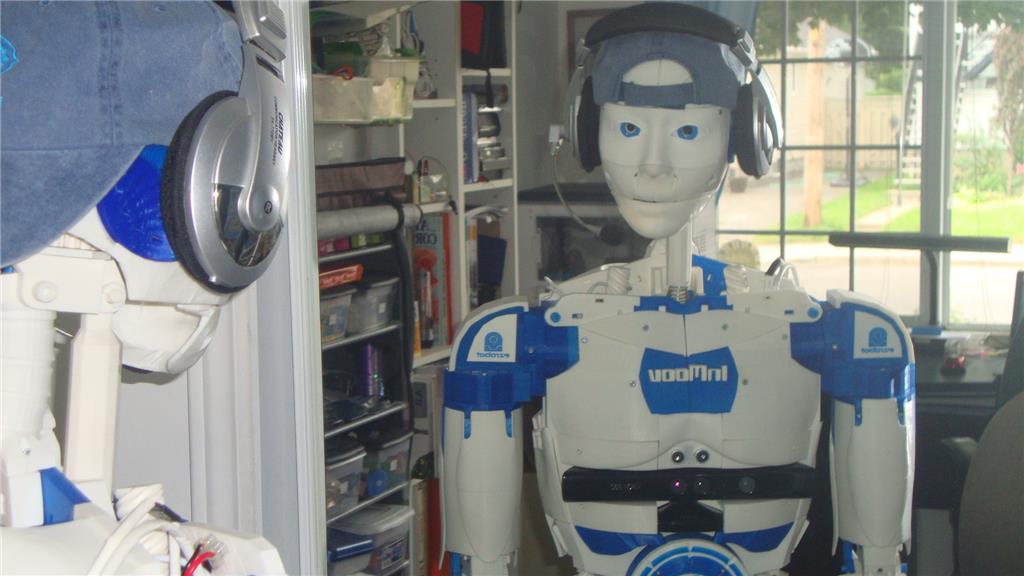
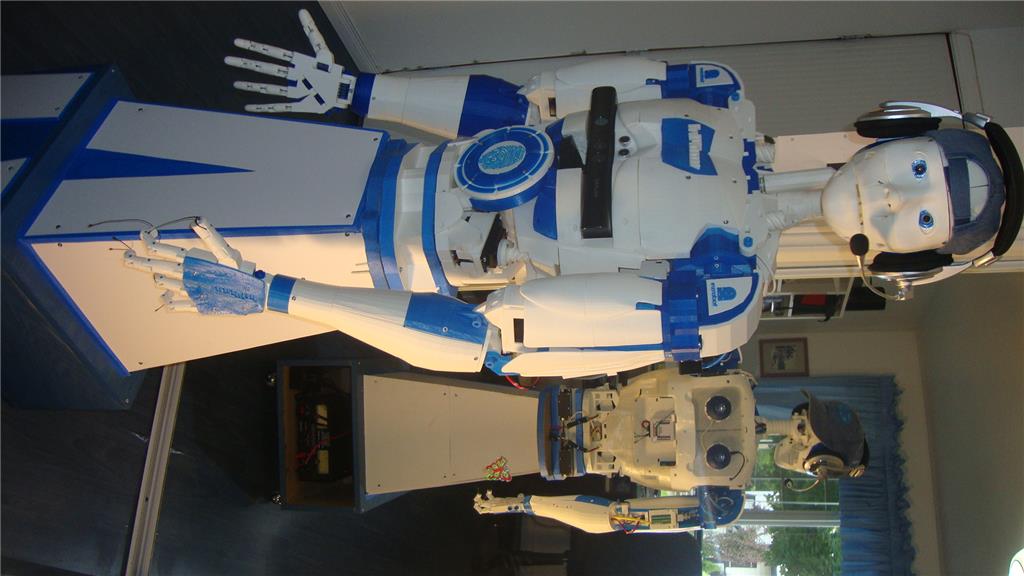

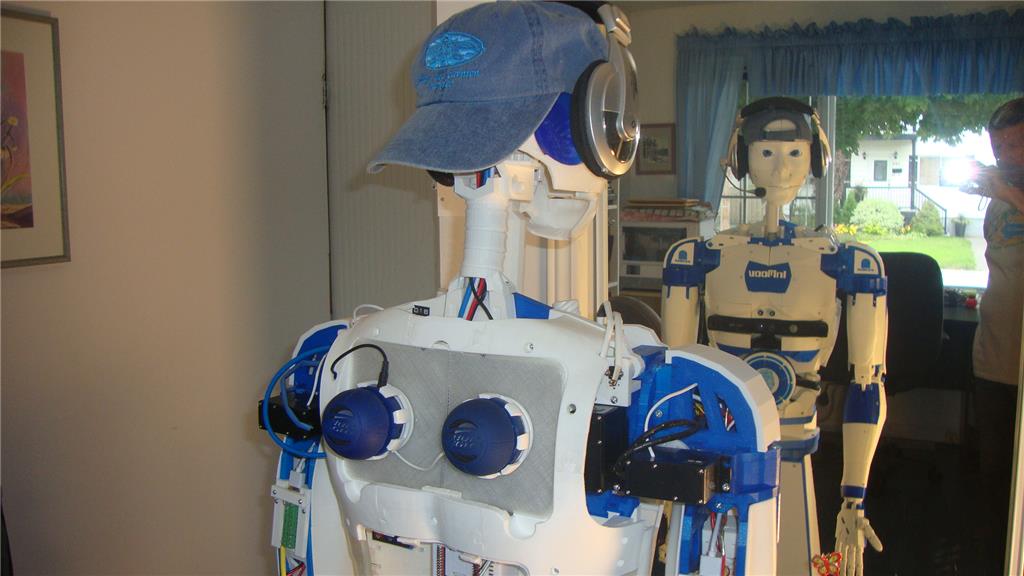




Let me introduce you my Inmoov version ,
(my 4 year grand daughter called it : ROBOTO)
The work is not yet complete , but I think promising.
I intend to take a break during the summer and will get back to my project later.
Surely if it rains outside I will probably start writing scripts
(it is so easy to get addicted to this kind of project)


By Aerius
— Last update
Discover more robots

Robohappy's Cybot2.0
Cybot 2.0 updated with compact head controlled by an Acer W3, featuring speaker, ezb camera and RGB animator, expandable...
DJ's Jd Connects To Nest Thermostat
Connect your JD robot to a Nest Thermostat to control your home's temperature remotely from anywhere.

Nallycat's Cog A Social Interactive Robot
Custom Zoe robot head with added mouth, standard metal-gear servos and EZ-Robot V4 controller, camera and illuminated...

I'm including a previous youtube video into my project.
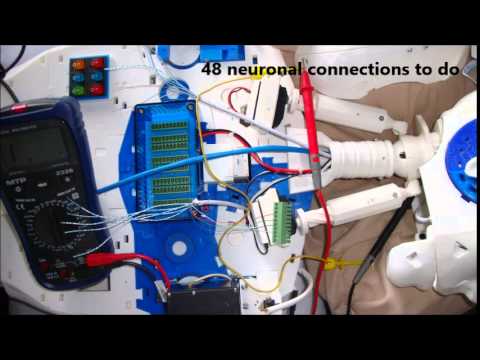
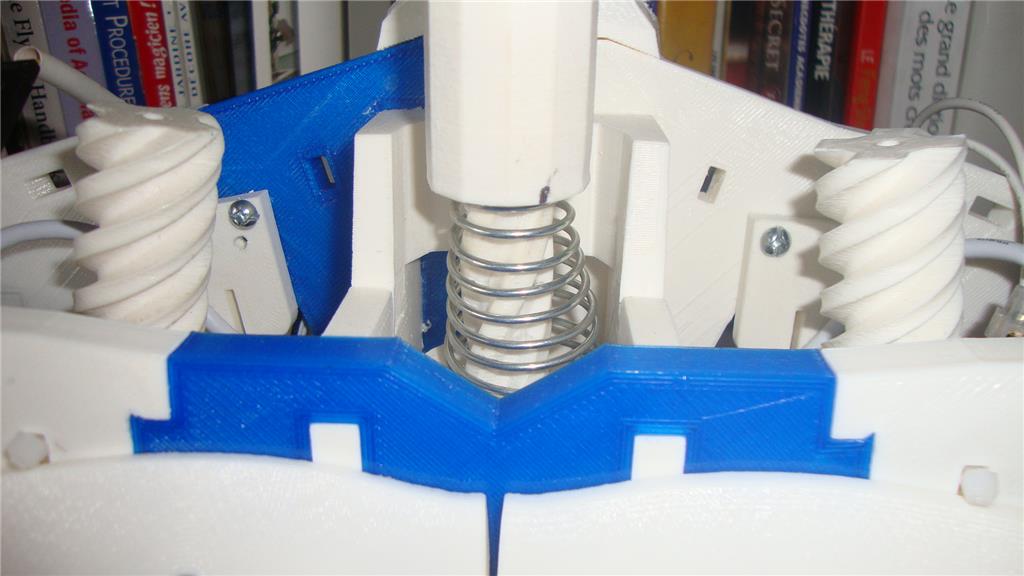
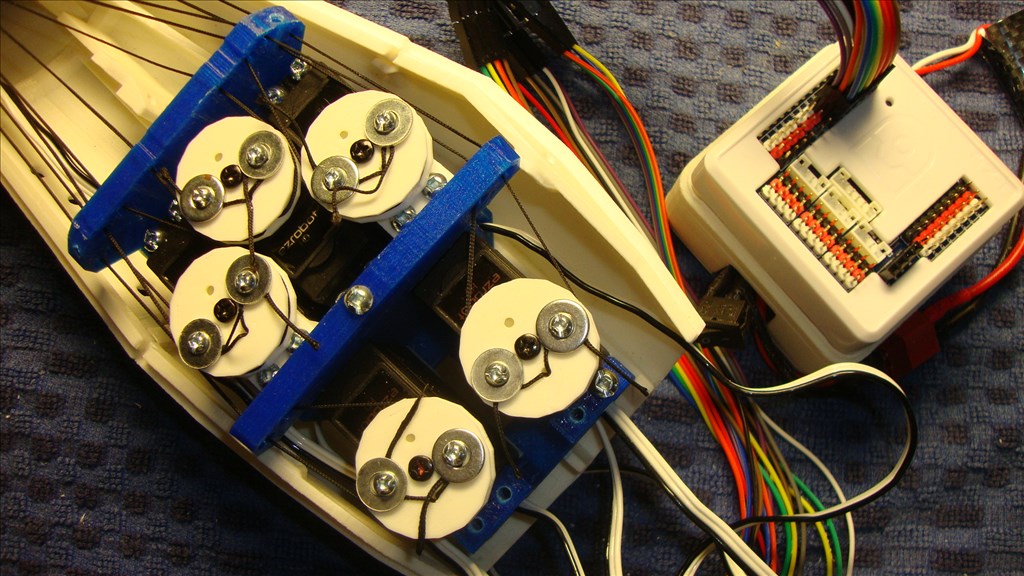
Talking about the buzz noise coming from servo trying to hold position. The Inmoov shoulder having 3 servos to control the arm movement is quite a challenge to. The arm twist and arm lift mechanism are capable to hold the position even when the servo is release. (also shoulder lift in most of the case).
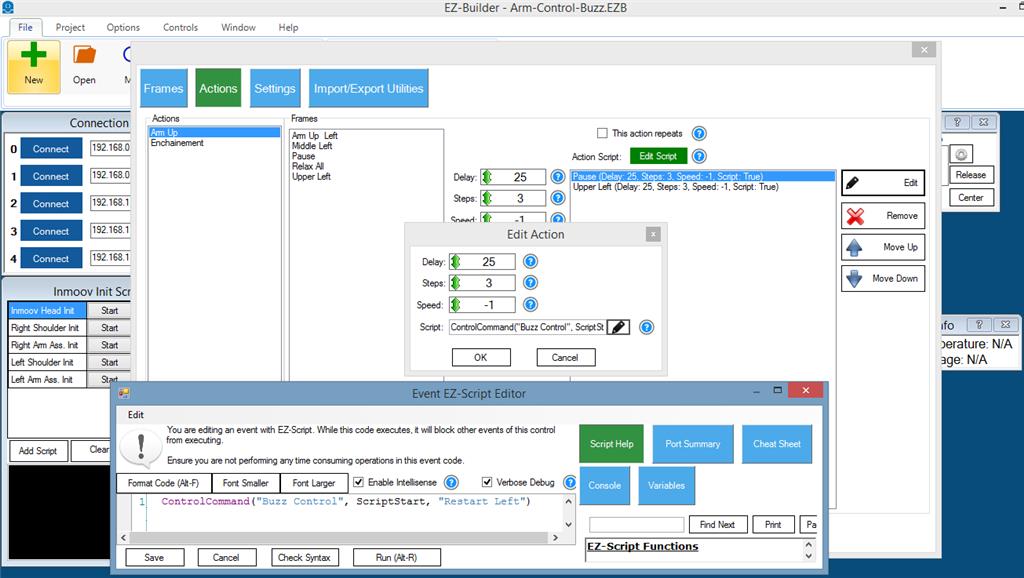
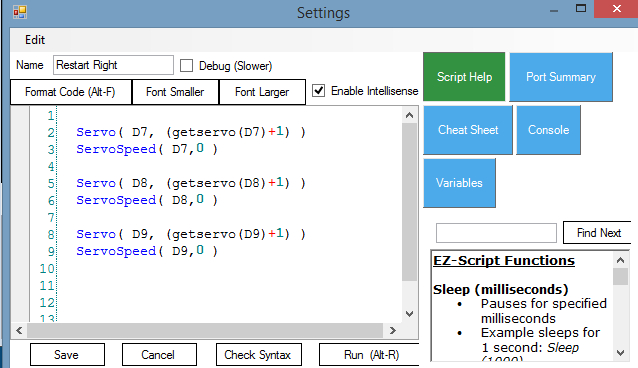
NOTE: after a servo release command, the only way to restart it, is to set the speed to 0 or 1.
Here's my solution: 1- At the beginning of an action, do what I call a RESTART.
2- Do the action (adjust the speed you want)
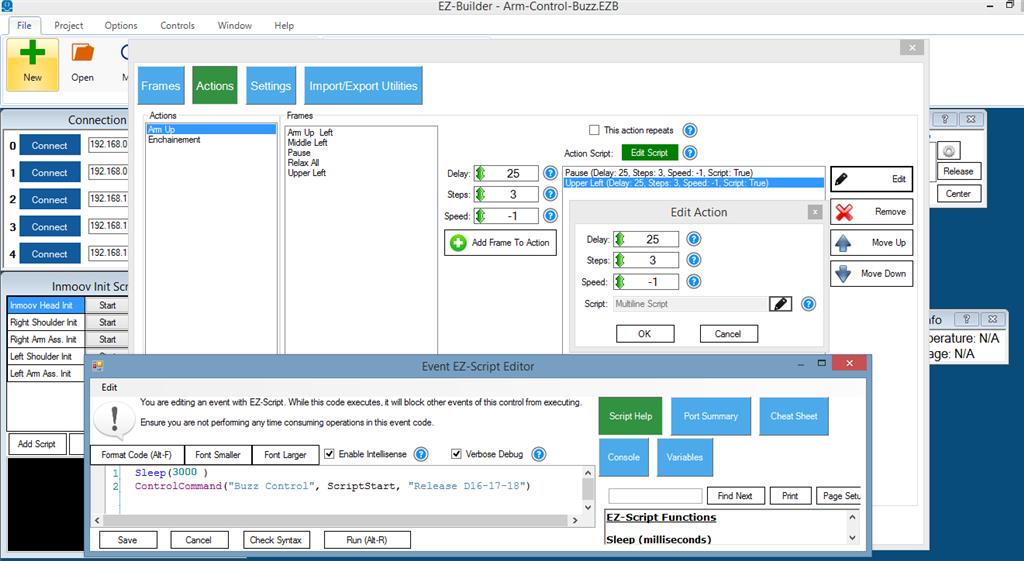
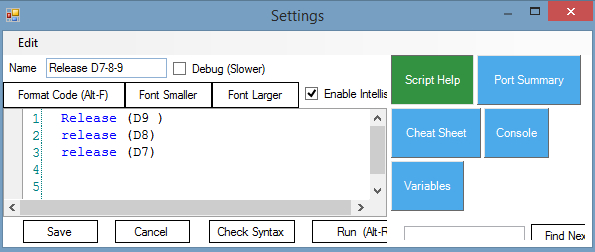
3- At the end of the action then do a Servo Release
(first line is a sleep timer to let the action finish his movement before applying the release command)
Start and Release could be 2 separate script that you call from each frame within an action. Call Restart Script within a pause frame, Call Release Script within the movement frame.
It's working
Instead of the last script where you are useing the sleep command to wait for the movement to end and releasing the servos, can't you instead use the auto release control? It should watch the servos you have listed in it and release automatically after your choice of time. However I'm not sure this will work with auto positioning.
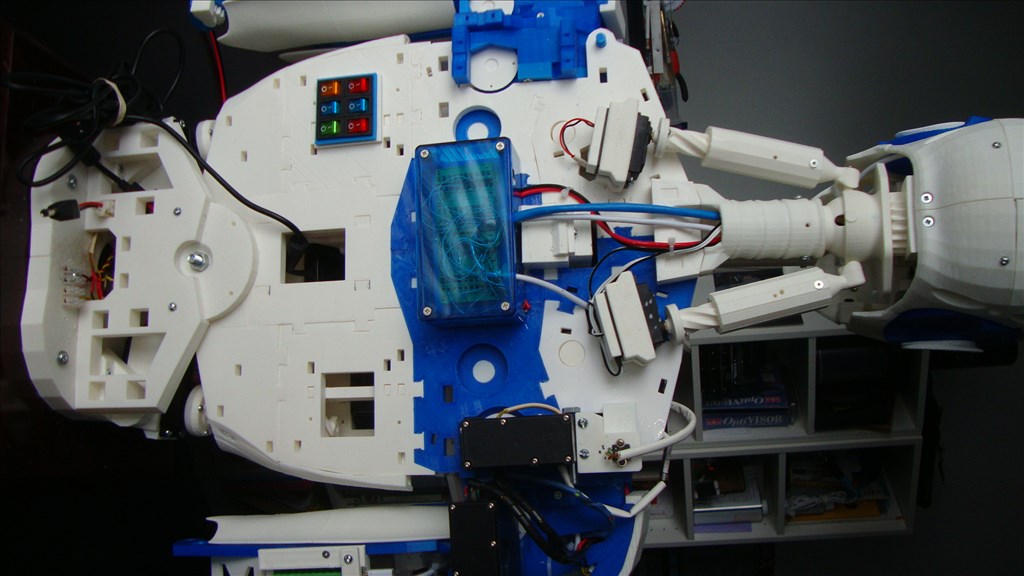
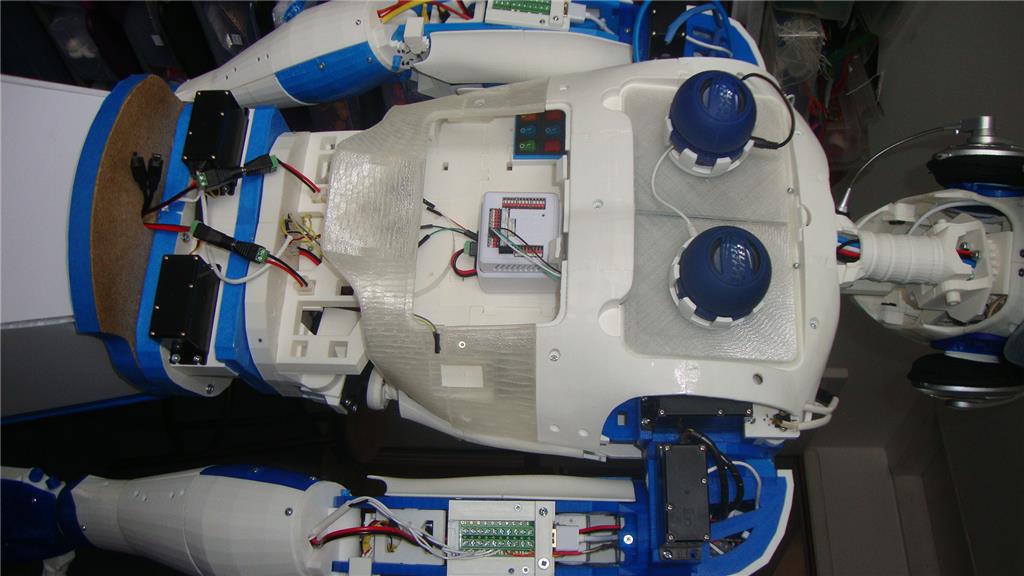
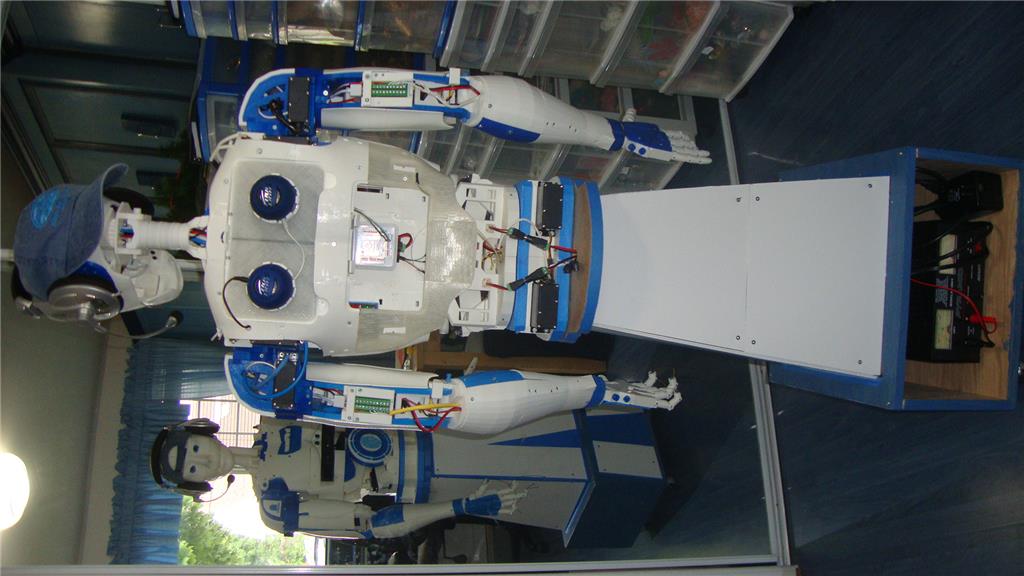
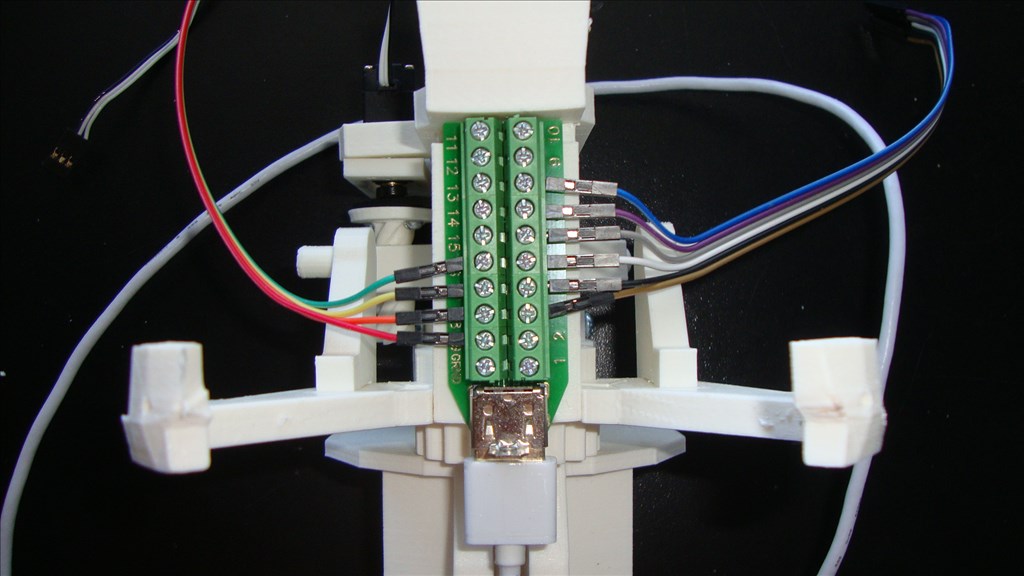
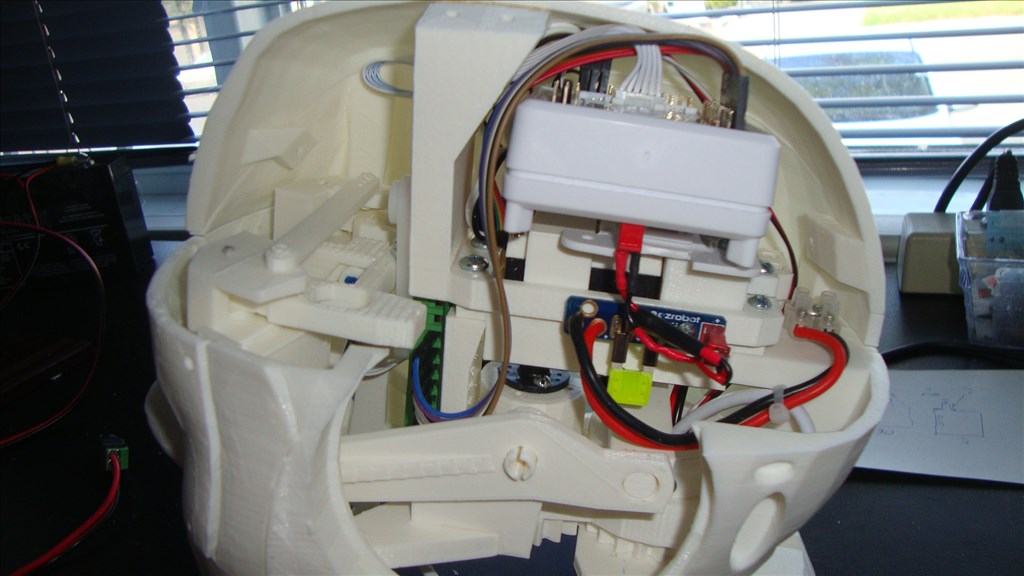
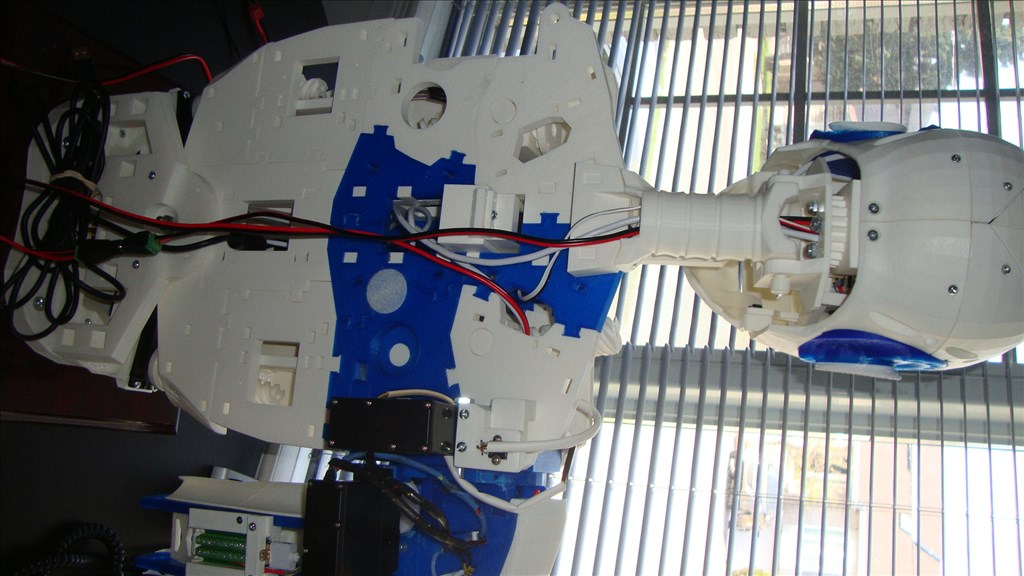
Additional pic. about my Inmoov wiring and EZB's location
@Aerius,
What's the idea for the xbox kinect ? And the location (mid body) ?
As per Gael Langevin original design & a project showcase:
https://synthiam.com/Community/Questions/7642
I did not experiment much with it, it is still on my to do list
@ Aerius
Nice neat work as always Gillies.
Instead of releasing the servos with ez-script, you can create a frame that specifies 0 for the position. 0 value means release servo, and -1 means skip servo for this frame. You can find out more here: https://synthiam.com/Tutorials/Help.aspx?id=180