





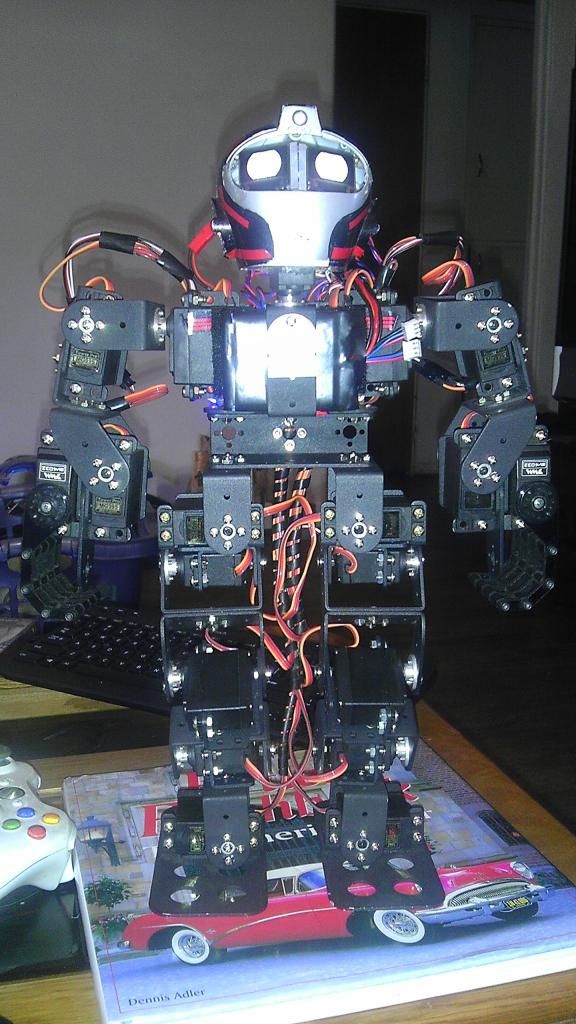






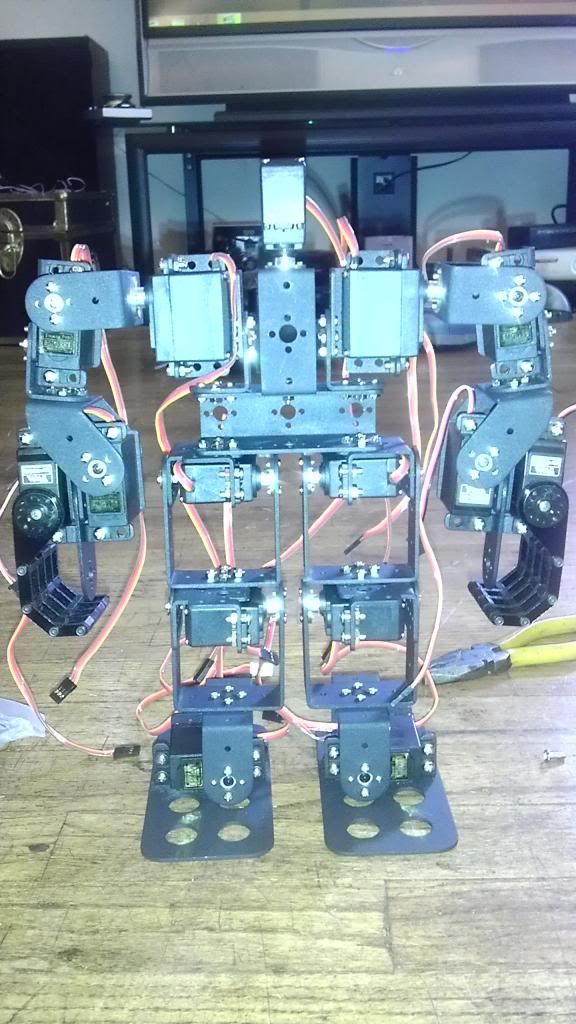
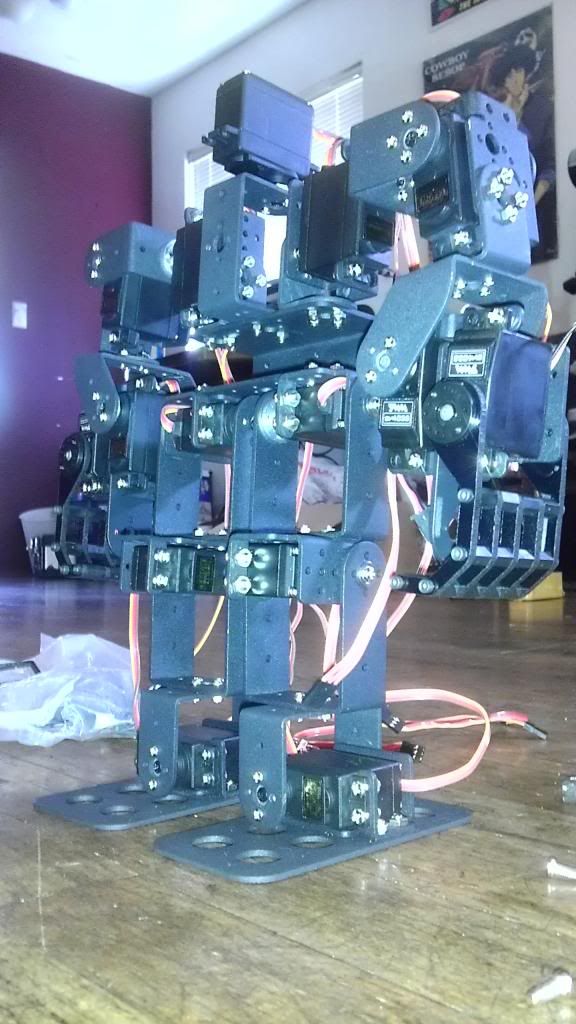
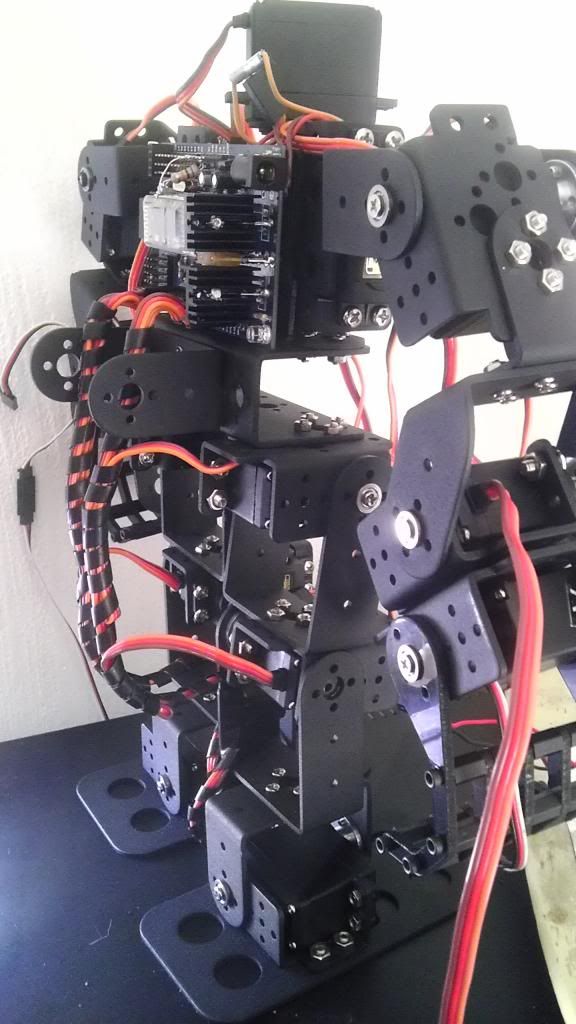
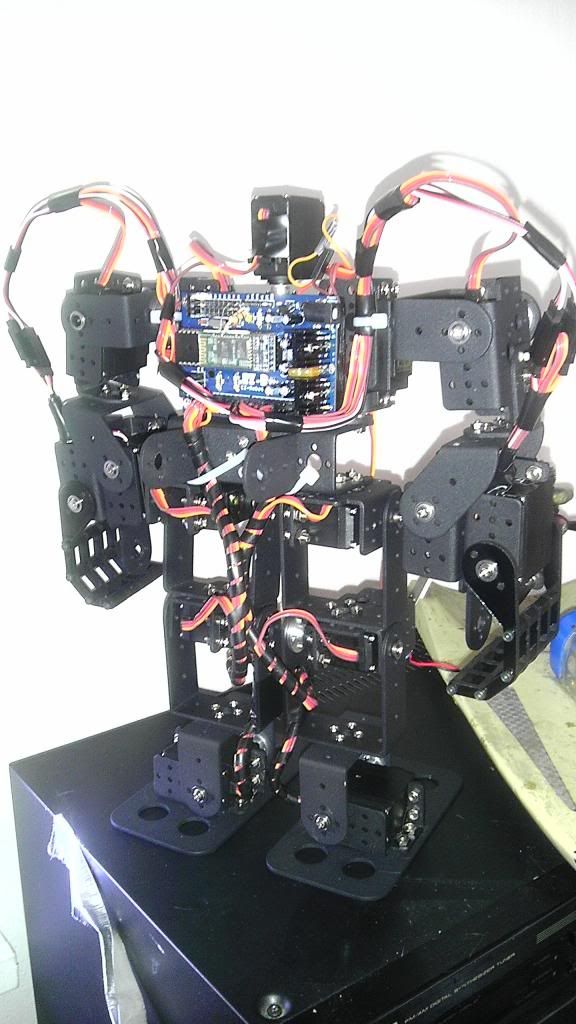
Hey everybody, its been awhile since I built a bot, and I'm back to humanoids again lol. This is a cheap 15 DOF robot kit that I found on ebay. All the kit included was powdercoated aluminum brackets, screws, and those awesome aluminum servo horns. No instructions. So, I kinda built it my own way, with a layout similar to JD. I used MG995 servos because theyre cheap, metal geared, and (supposedly) 208 oz/in of torque. only the head servo gets its power from the EZ-B, all the rest get power from a Castle Creations 10 amp regulator. It's not enough. From what I read, these servos draw 2 amps each...gonna add more regulators later. Ok, enough chit chat, watch the video and lookit the pics!





By Kenny Storm
— Last update
Discover more robots

Lumpy's Lumpy's Roomba Rover
Upgrade Arduino 4WD chassis with Roomba wheels for straighter motion; H-bridges mounted, connectors pending, EZ-B...

Perry's Baby Yoda Is Too Cute
Animate a 3D-printed Thingiverse character with an Iotiny and servos for head, arms and walking, add soundboard baby...

Bhouston's Inmoov's New Gripper
3D-printed syringe-powered universal gripper adapted for InMoov arm; picks up small objects; EZ-Robot OS enables easy...

howlong can you program the robot before you have to stop for overheating the servo's. blush
@Kenny Storm, under frames you can check a box for this action repeats. Request have it so you could enter a one for one time, so on. What do you think?
:)

 j
j
@Antron It would be really cool of my servos could send position data back, but the hardware isnt there. the board only sends pulses to the servo, but the servo cant send any info back. dynamixel servos can send position data back, I thought @nomad's bioloid had that feature....or at least could be added or something...i dunno.
As far as how many frames to use per action, i start simple with a small number of frames and just add more if i need them. it only takes 4 frames for the walk, but i bet i could benefit from 6. its a simple robot though, for something with more dof in the legs, it gets way more complicated.
@Nomad: I havent had much of a problem with overheating. When I create frames, I relieve most of the load on the servos by hanging him from his shoulder servo mounts. This works great as long as your hanging wire doesnt interfere with the robot's movement. my 1600mah lithium pack lasts for almost an hour if its hanging, about a half hour if he's on his feet:)
I'm gonna post his .ezb file in the "incomplete robots" section of the cloud, it'll be labelled "newbot". Its kinda interesting to see how I set up the AutoPosition actions:)
More to come:) I have a v4 on the way too, along with more servos and brackets. This guy is in junior form, I wonder how far i can take it:)
btw: go hawks!
i uses the robotis program.that has all data what the servo's doing. i dont understand the YXZ in robotis ,so my servo's from the legs chutt off rapidly. am hoping this will be better whit the ARC. i made a video aldo its not very clear one but you can see all data like, heating ID angle power loading.
Hi, did the grippers come with the robot kit? The 15dof kits I found don't picture the grippers,
Would you consider sharing your project on the cloud?
Thanks
These are the grippers I used:
www.robotshop.com/en/lynxmotion-robot-hand-rh-01.html
I also uploaded my ezb file to the cloud, its in the incomplete robots section under the name "newbot":)
Thanks for the update Kenny.
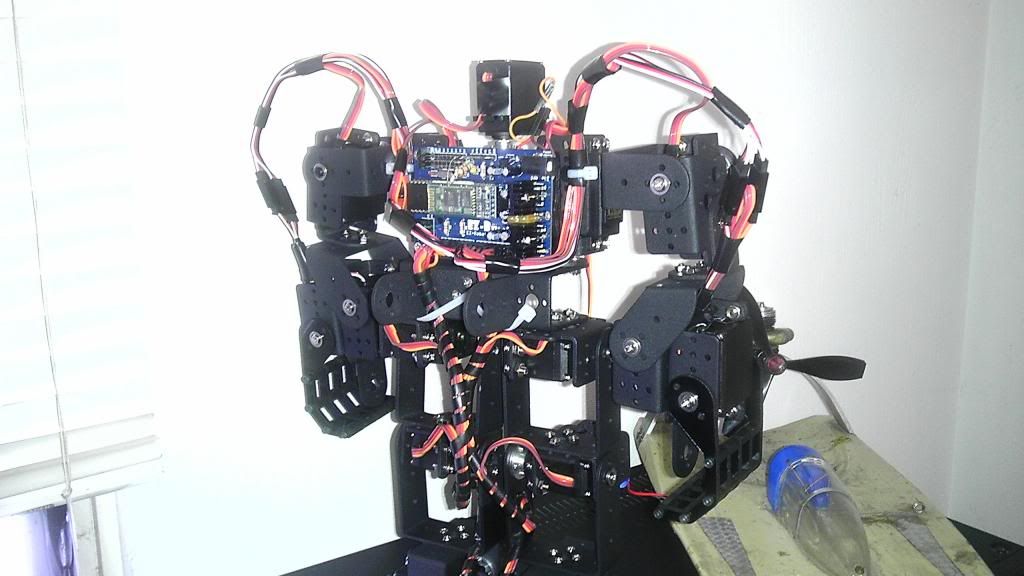
Its been awhile since I posted, but I've still been busy making changes to the 'ol humanoid:) Ive added four more servos to the legs, bringing the count to 19 dof. 5 per leg, four per arm and one for the head:) he's now 22" tall and weighs 5lbs lol.