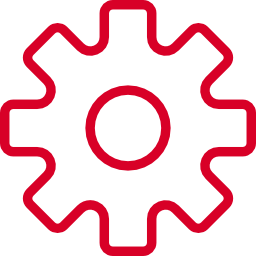





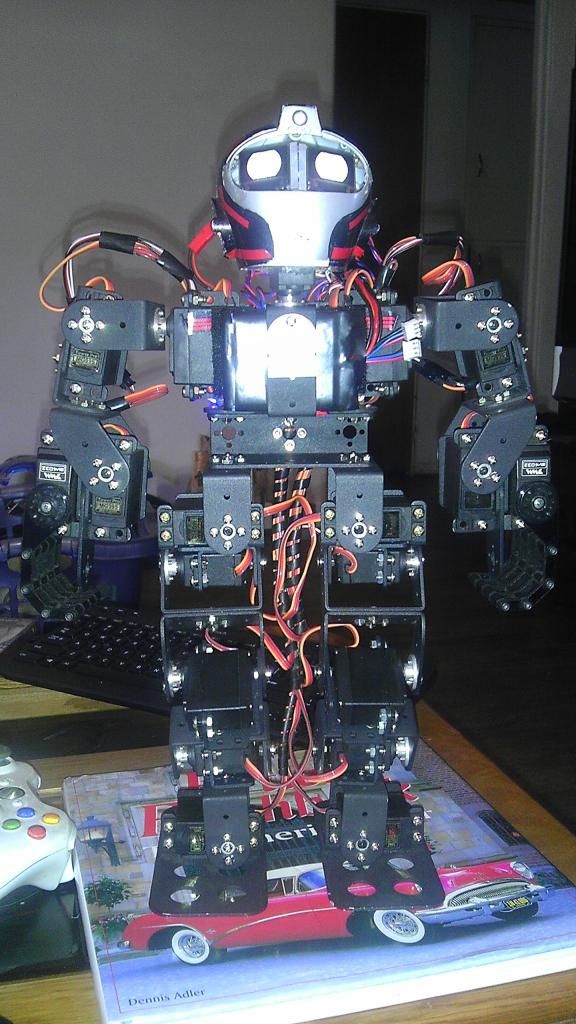






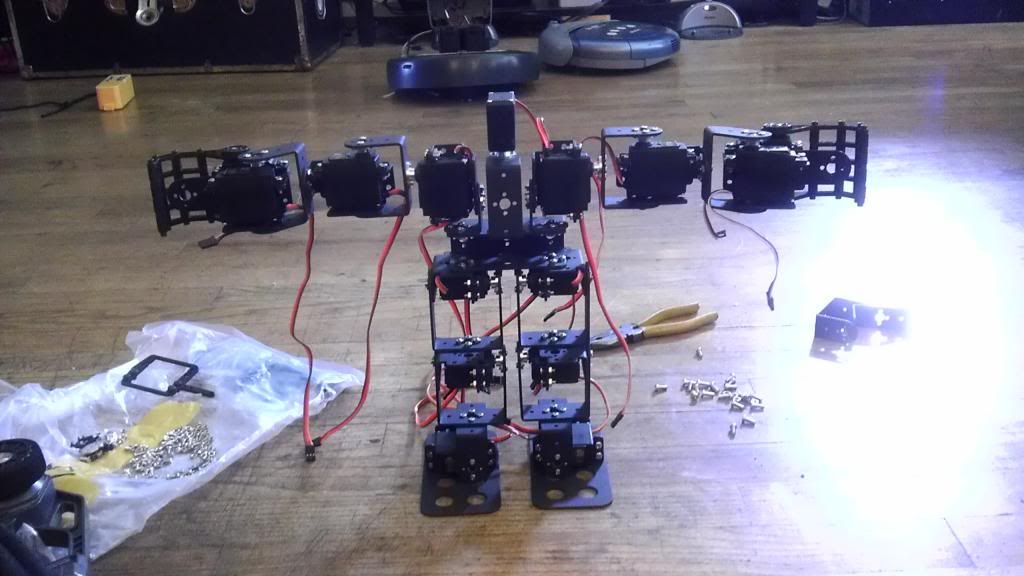
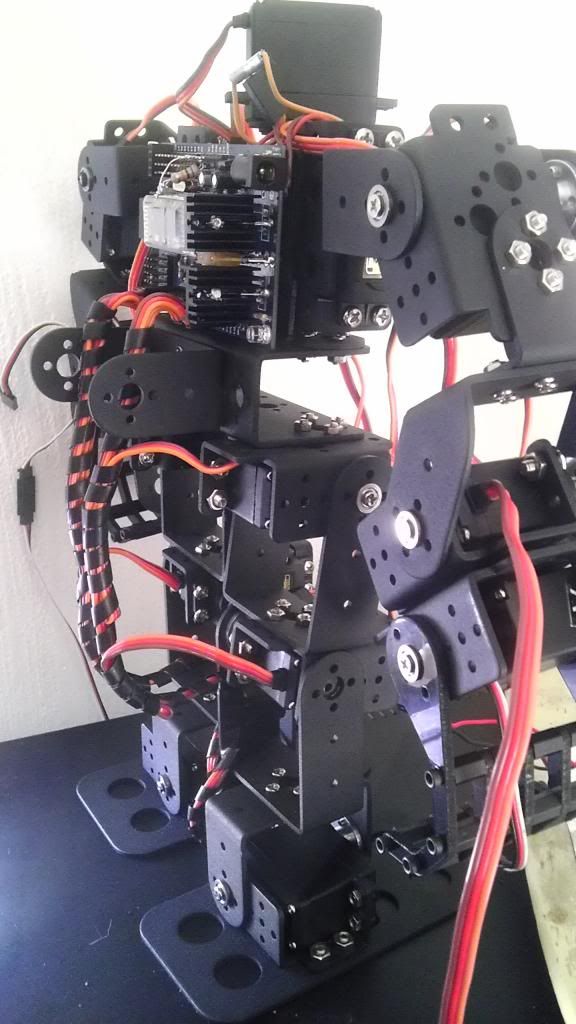
Hey everybody, its been awhile since I built a bot, and I'm back to humanoids again lol. This is a cheap 15 DOF robot kit that I found on ebay. All the kit included was powdercoated aluminum brackets, screws, and those awesome aluminum servo horns. No instructions. So, I kinda built it my own way, with a layout similar to JD. I used MG995 servos because theyre cheap, metal geared, and (supposedly) 208 oz/in of torque. only the head servo gets its power from the EZ-B, all the rest get power from a Castle Creations 10 amp regulator. It's not enough. From what I read, these servos draw 2 amps each...gonna add more regulators later. Ok, enough chit chat, watch the video and lookit the pics!





By Kenny Storm
— Last update
Discover more robots

DJ's Cyborg Snowman
Animate a snowman with ARC and an EZ-B controller using webcam motion tracking, servos and voice recognition for...

Tfitzrandolph's Custom Robot Build Wobble Frog
Wobble Frog robot toy built with EZ-Robot IoTiny, LIPO and 270 servos, controlled via Synthiam ARC scripting to create...

Kab's Ogie The Bear In Action
Ogie the talking bear with EZ Robot: HD servos for eyes/mouth/head, speech recognition, lip-sync, personality, and...

bump!
I got yer bump right here, pal:) Havent done much, gonna have to rewrite all the frames after i get my v4, so this is all I have for now.
Nice!
did you find a name yet? name (storm) maybe.
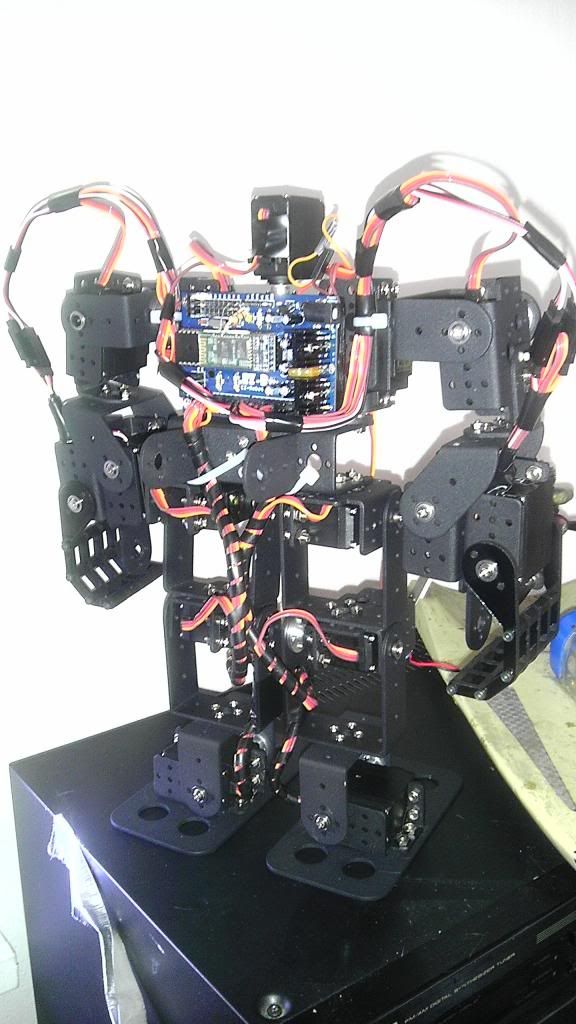
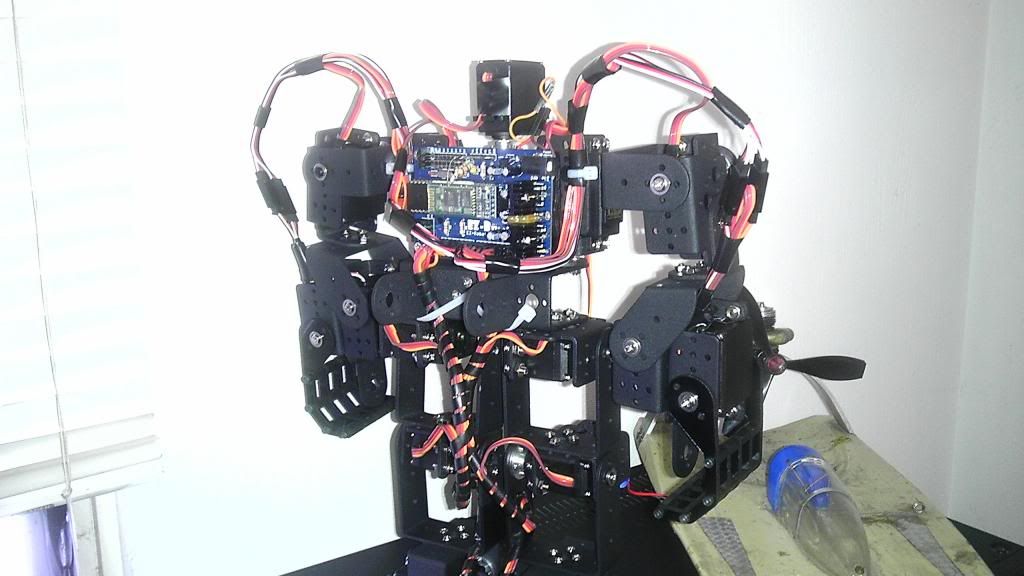
Havent used this bot in awhile, decided it was time to get some stuff done. It walks forward and backward with the new legs and i extended the arms by an inch and a half or so. Theres an accelerometer behind the battery in the chest. I wrote a script that polls the accelerometer every five seconds to check if the robot is on its face or back. If its standing, nothing happens. If its on its face or back, it stands up automatically. Heres a long walking video.
kenny
very nice walk.love it.
Nice Kenny. That looks like the way I walk after I've been sitting on the couch for a few hours.
the walking is awesome! it looks like the legs were re worked to kind of resemble the Robi robot legs. I love that lay out! you should take a look at how they mounted the head with 2 servos they get very good natural movement out of the head. ill try to post some pics.
but again awesome walking motion.
any chance you can show us how you set up the accelerometer? please.