Discover more robots
Ezang's New Creation - Mr. Roman
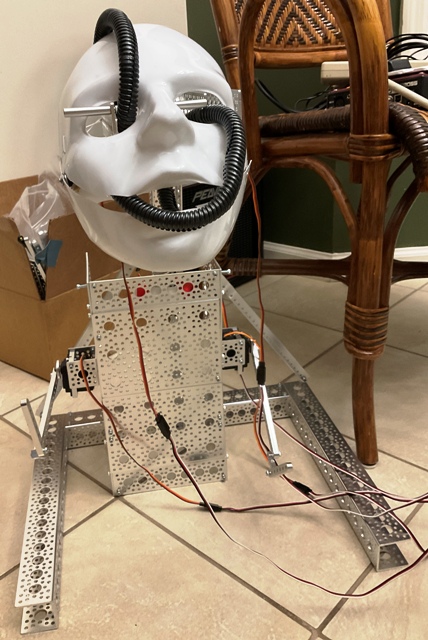
New Arduino creation Mr. Roman features moving eyes and mouth, with more enhancements coming.

Csa459's Ok Guys Wet And Dry Vac For Robot Start With
Repurpose an old wet/dry vac shell with an EZ-B kit-ideal starter for a planned build after Christmas, prepping parts...

Bhouston's Bob's Inmoov
InMoov robot running on EZ-Robot: project recaps, links to original builds and ongoing updates

ezang
you have almost an army of metal robots.
Nomad, You might be right my friend - lol
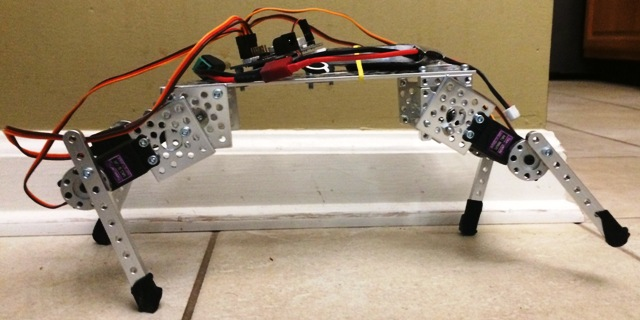
This last one was challenging, to get it to walk was a feat to overcome.. Auto-Position stuff... Distances were a litter different in the the 4 legs, had to compensate...
Thanks Jeremie for the email
Your community post was liked by 'Jeremie'.
Your hack last night was "right on"
That actually walks with only 4 servos. Pretty cool!
That is very cool. You don't almost have an army, you have a platoon of bots:)
You also may be right, lol, I trying
EzAng, That is amazing how it walks with 4 servos. I agree with merne, you have an amazing amount of robots. You are always busy with new creations. Steve S
ezang
some idea i have .if you look at your walking gait you see each paw moves about 10 cm forwart . what would be the result if you move the paw only ,excample 3 cm and little faster ?