
Discover more robots
Ezang's Mymodifiedadventurebot
Modified Adventure Bot with ultrasonic radar, camera, RGB animator and custom back wheels

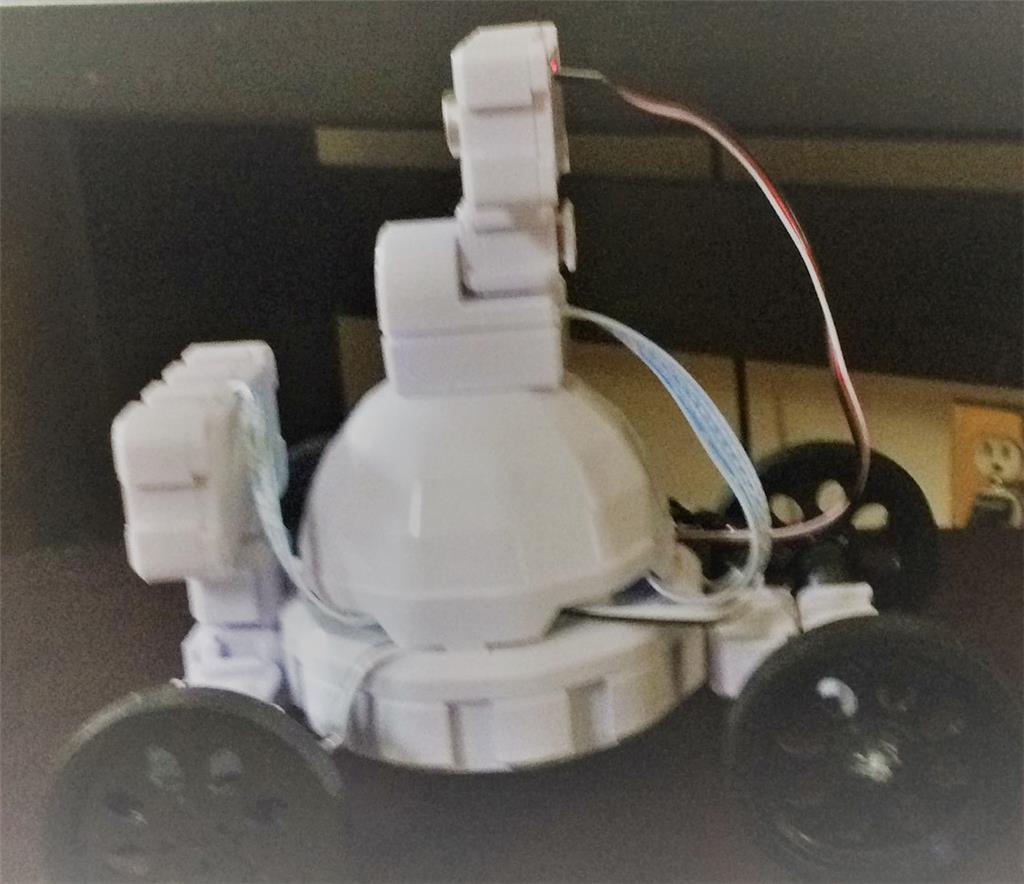
Rich's Ez-Rover Mk I
EZ-Rover MK1 autonomous rover converted with EZ-B, H-Bridge and camera; 6x AA power, IR/ultrasonic sensors for...

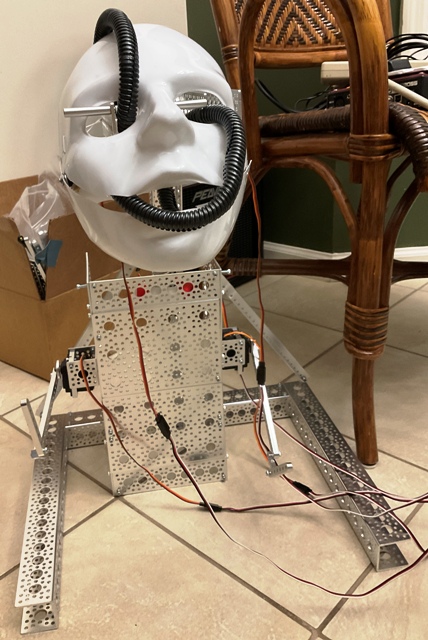
Joseph4760's Say Hello To Little Frankie
Little Frankie robot downsized to 1ft, built from mixed parts, driven by 12V motors and 11.1V LiPo, running EZ-B V3 and...

ezang
you have almost an army of metal robots.
Nomad, You might be right my friend - lol
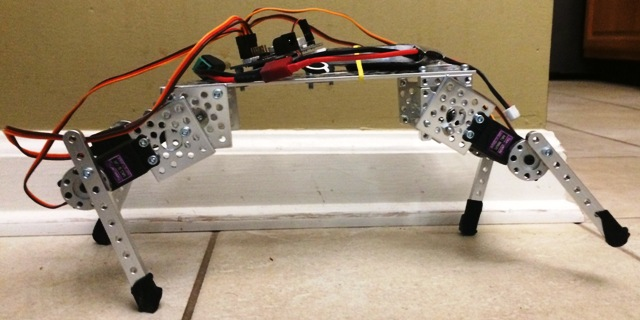
This last one was challenging, to get it to walk was a feat to overcome.. Auto-Position stuff... Distances were a litter different in the the 4 legs, had to compensate...
Thanks Jeremie for the email
Your community post was liked by 'Jeremie'.
Your hack last night was "right on"
That actually walks with only 4 servos. Pretty cool!
That is very cool. You don't almost have an army, you have a platoon of bots:)
You also may be right, lol, I trying
EzAng, That is amazing how it walks with 4 servos. I agree with merne, you have an amazing amount of robots. You are always busy with new creations. Steve S
ezang
some idea i have .if you look at your walking gait you see each paw moves about 10 cm forwart . what would be the result if you move the paw only ,excample 3 cm and little faster ?