





























































































-635353562186322812.png)




















































































































































Hi all,
I'd like to share a video I just took of my full size Lost in Space B9 robot that's controlled by two EZ-B controller boards. Right now they are controlling limited movement and voice response of a few motors, lights and sound files played from a Sparkfun MP3 Trigger board. Although I'm just starting with the animation and have more building on the actual robot the result (mostly thanks to the EZ Robot controller board) is shocking. Please have a look at this (4 minute) You Tube vid and enjoy.
Please excuse some Technical camera lighting and sound issues. This is the first time I'd made and posted a vid online.
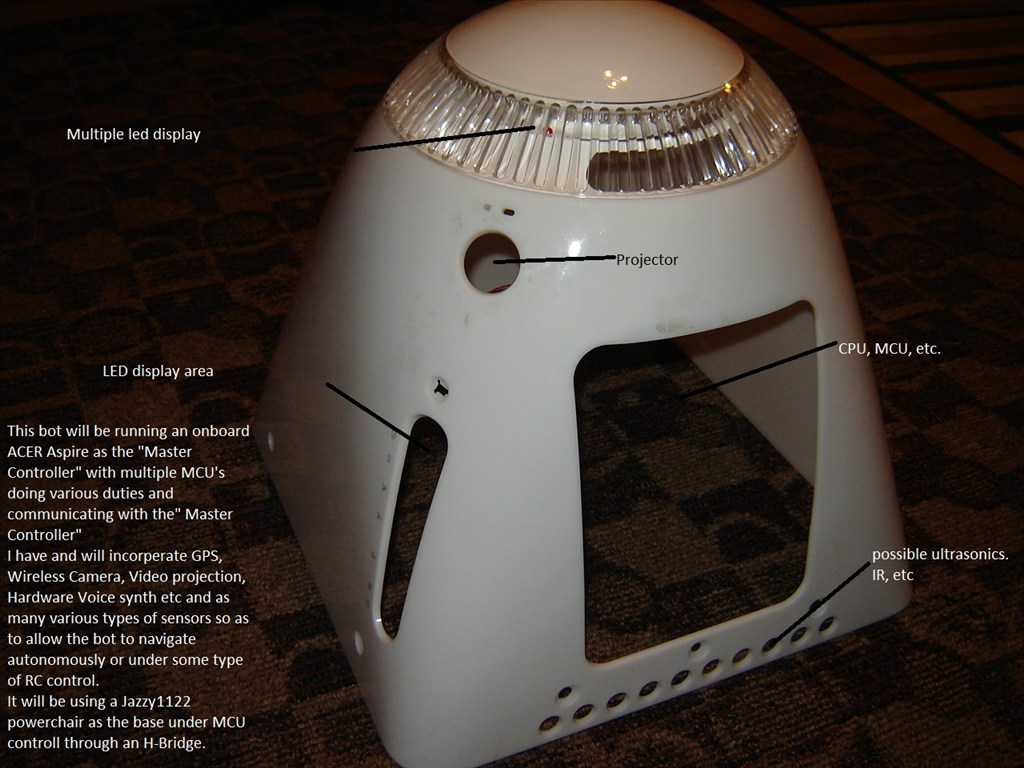
EDIT 8/2/13: Just realized I have no good pictures of how my B9 will look when complete. Here's one of the actual TV robots from the 60's TZ show Lost in Space and one recent shot of where I'm at with my build over 1 1/2 year after I started. Enjoy:



Thanks, Dave Schulpius
Discover more robots
Perry's Scratch
Putt's Bigmack


I thought you all may enjoy watching a video I took of the AutoTune process of the Kangaroo X2 that is controlling the speed and position of my Arm Rail System motor.
Very informative. I have to look deeper into these motor controllers, very very cool auto set up. Thanks for that!
Great demonstration. It was nice to see the controllers setup in action, and you described how they work very well indeed. I may have to invest in these for a future project.
Thanks for doing the video.
As always, thanks for sharing.. One more arm to go, then another tune and soon he comes to life, with two arms !
Best regards,
Ron R
Thanks guys. Yes, it's fun to watch but a little stressful wondering if I'll get a successful autotune. If there's any issues with wiring, connections, feedback control or power supplied the tune will fail. That's a good thing but sometimes it's hard to figure out what the issue is. There are error codes that flash on the led but that's less than helpful at times. I make sure I have all wires properly sized for the load, connections tight and a power supply able to supply enough amps to the motor being tuned. I've had my best luck with high resolution encoders but a good pot works good too. Once you get past the easy learning curve and your system is set up properly the Sabertooth / Kangaroo is very solid and easy to use. Not only are the position and speed commands easy to send through the Uart ports but I can get feedback information from the Roo if needed. I talked DE support into sending me a Bata version of the kangaroo software that has ramping for postion control. Man, does that work great. Smooth starts and stops. In my case this completely elements any need for feedback from the Roo to manually code a ramping script. I find the right setting is about 3/4 of top motor speed in the acceleration box of the All Controls tab in the DEScribe software. This Bata version may be released by now, I don't know. Either way this is some really cool stuff.
Dave,
The Kangaroo looks like it has some hefty heat sinks on it. I was wondering: with all the stuff packed into B9, will you be adding some cooling fans, or do you think there's enough ventilation in the torso to keep things at an acceptable temperature?
Totally amazing as always!
When I saw the heatsinks I thought I was going to have heat problems. However I've cruelly tested the motors I'm instaling and have never felt much warmth being generated from the Sabertooth controllers. The heatsinks barely change temperature when the motors are moving.
The B9 already has good ventilation from the bottom torso vents and up through the neon opening. With no cooling fans and the robot running all functions I have installed so far I can't detect any heat buildup.
Now once I have the arms installed and running that may be different. I'm installing a Mean Well power supply dedicated just to power both arms. It's able to supply 83 amps and has a heat sink inside it that is 3" high and about 12" long. When both arms are constantly moving they will be topping out at about 60 amps total so the heat may start building. However the arms wont be moving around all the time. Only once in awhile and then really only to pose and move around a little and then retract. So I may still have no issues with heat.
I'm getting closer to the first full arm test while installed on the robot. I haven't got a video yet but here's a few pics of the cable management system that will guide all the wires in and out of the arm while still supplying control and power to the DC elbow motor and the arm servos:
And here's a shot of the 83 mp power plant and twin Sabertooth/Kangaroo's that will be powering and controlling the arms.
I'm getting very excited as I'm getting very close to full power up and movement of the B9 arm. Although I've had each part working and moving on it's own I've never had everything mounted together on the robot and working as one. It's also a little flustrating as it seems to be taking forever. There's only so many hours in a day.