











































































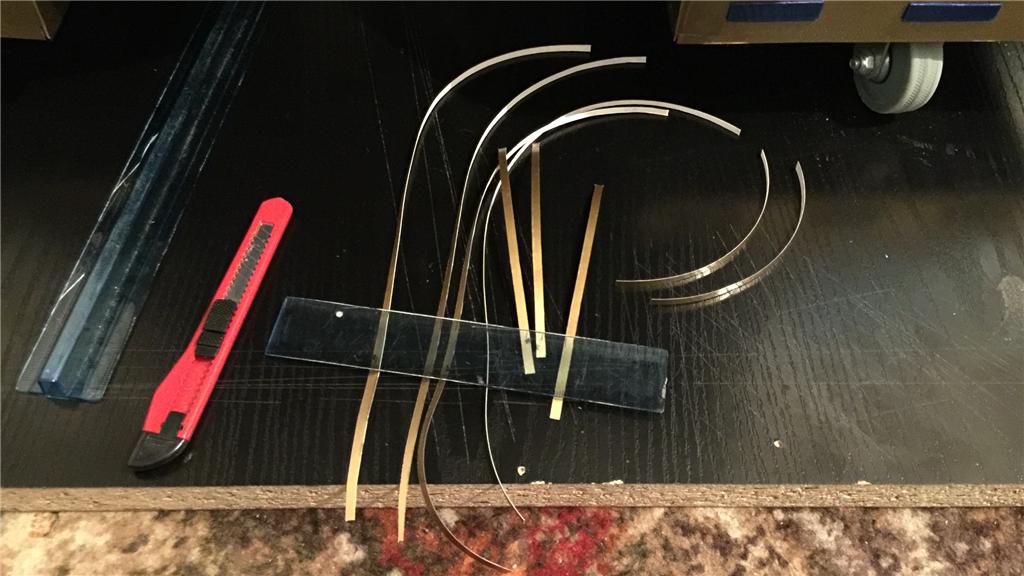



















Day 1 (4th August 2015)
So after throwing around a few ideas for a new project to sink my teeth in to, I decided to go ahead and do my own version of an Astromech Droid, rather an Astromech "Smartdroid". With K-9 being one of my all time favourite on-screen robots, R2-D2 was (and still is) just as much of an all time favourite of mine so building one of my own droids is a logical step for me. As my other robot showcases where posted when the majority of the work was done, this will be a build diary of sorts, with updates throughout the build.
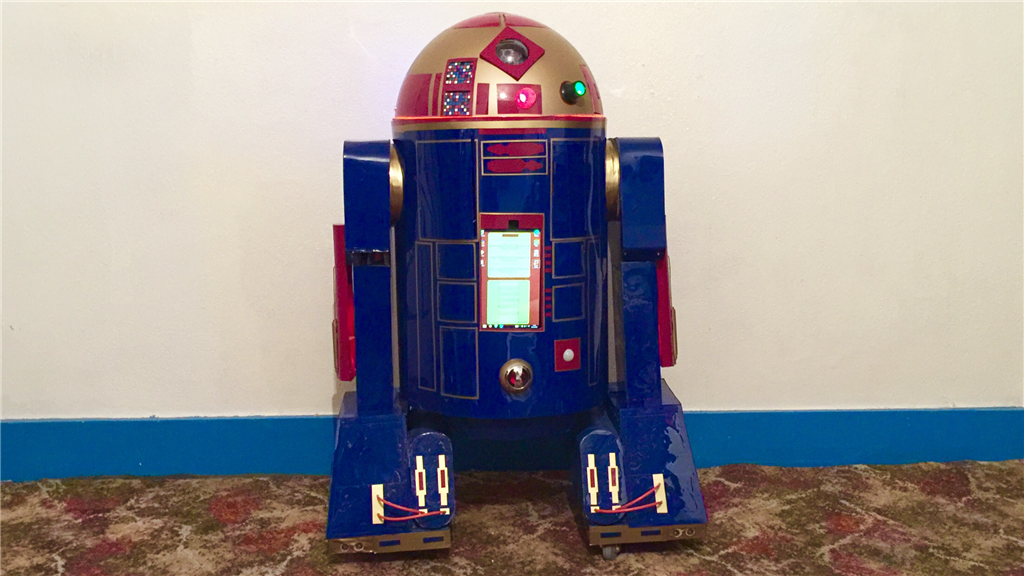
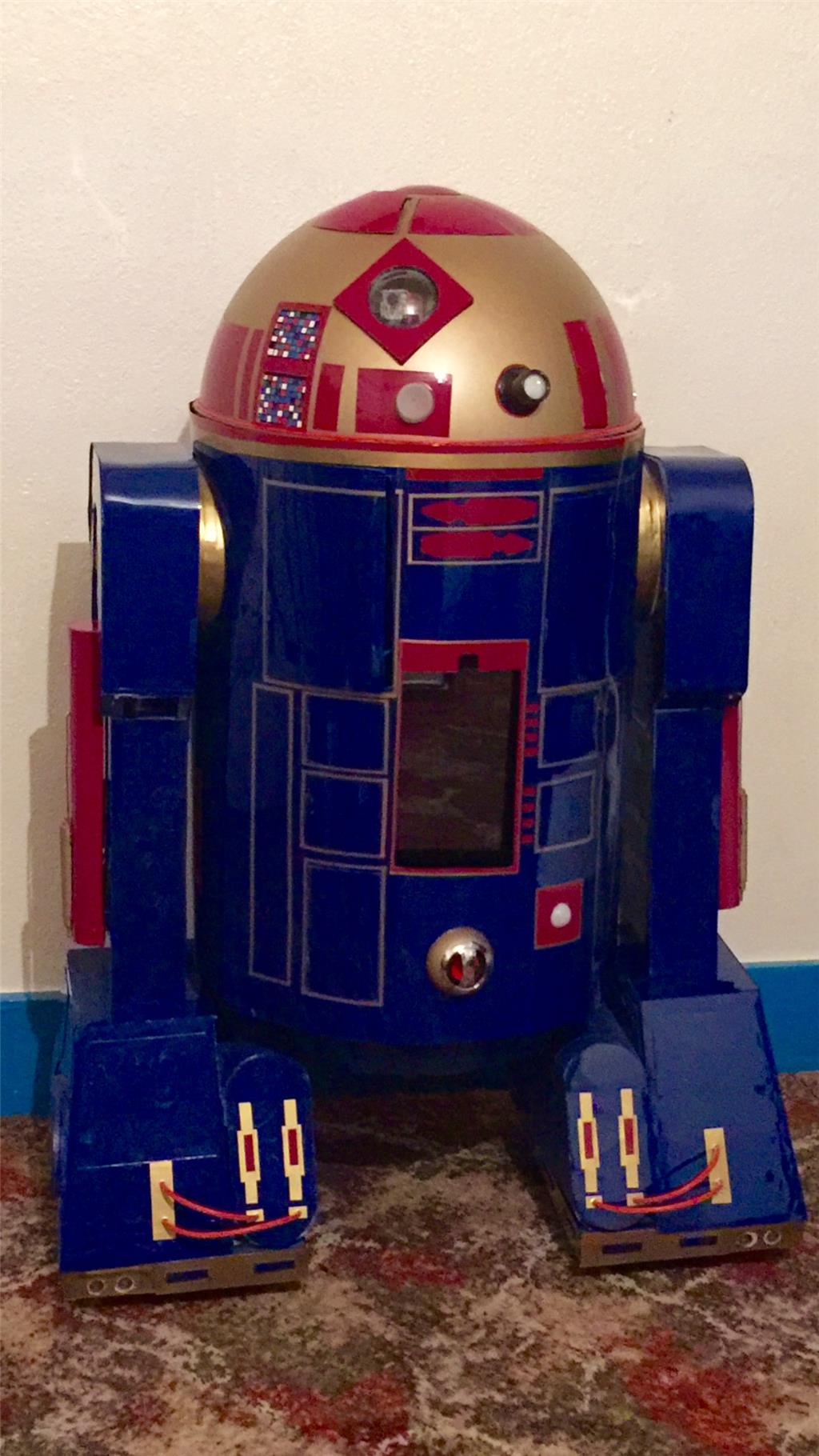
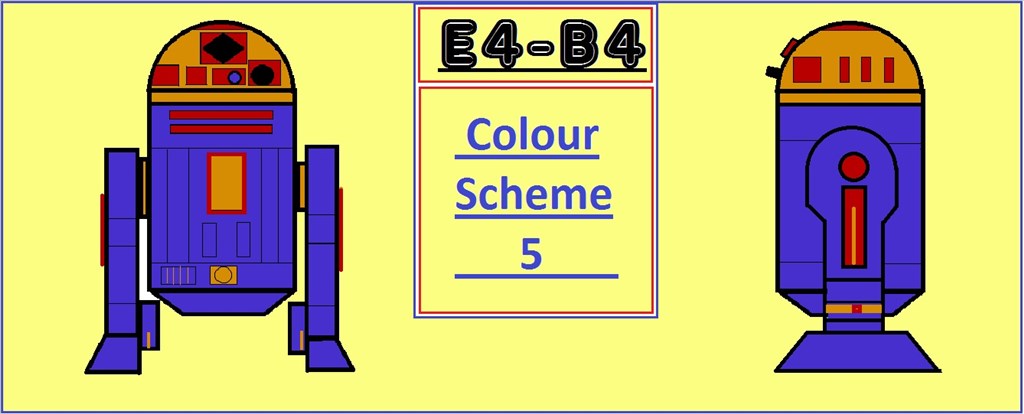
So wanting to get back to building, I had a few ideas floating around for my next BIG project and the thought about doing an R2 style robot came up a few times in the past (the blueprints I drew up that I've posted are 3 years old and was for an R/C version), and after encountering a few design issues for a large custom robot (which I will get back to one day), it was @Robot56's fantastic Astromech Droid project that was the final push for me to decide what direction I should go. There are so many great scale replica Astromech builds around that people have done, but much like my K-9 2.0 build, I want to stay away from doing an exact prop replica build and do a custom build with custom paint job (as seen in the blueprints) while still keeping with the overall original design.
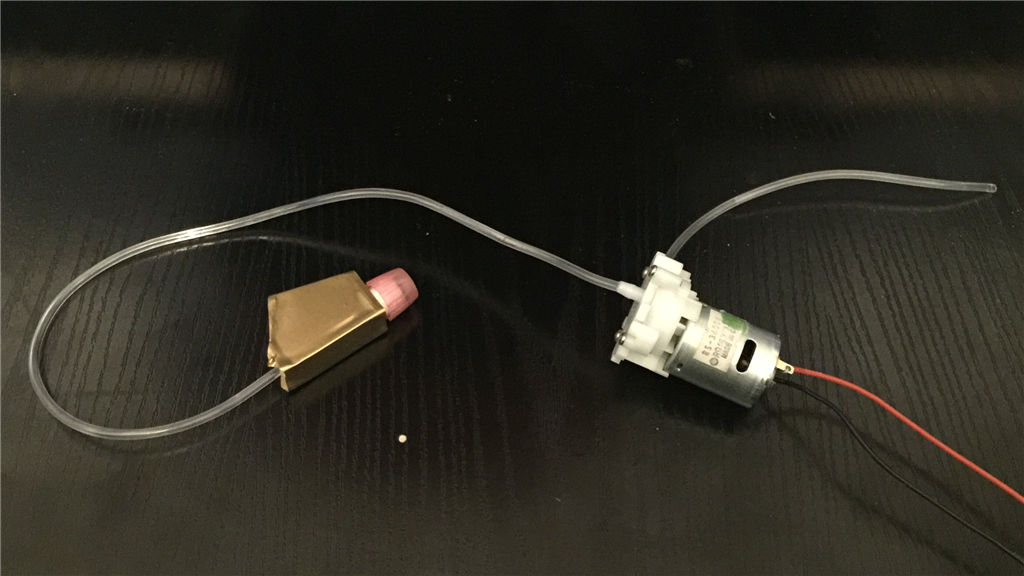
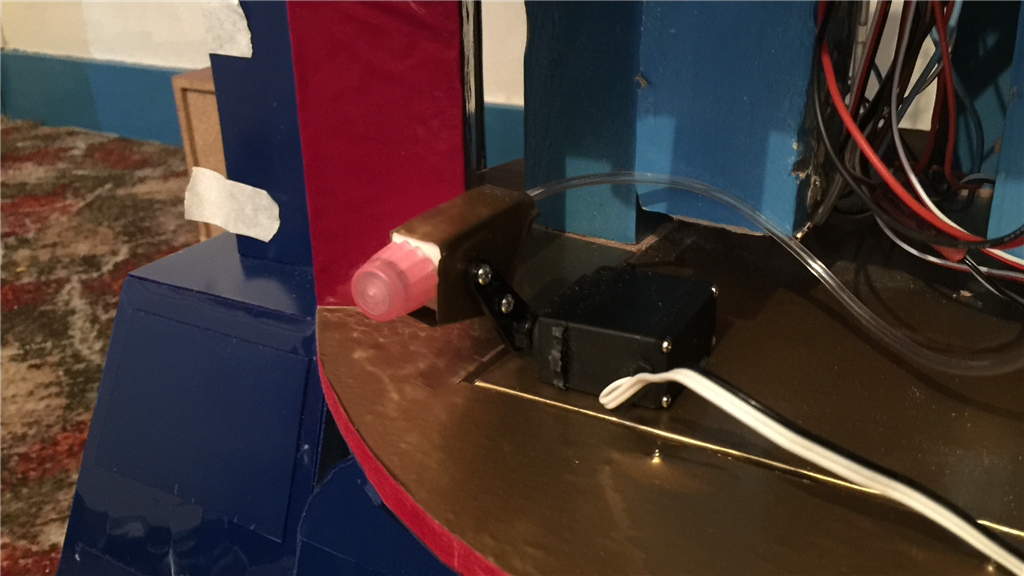
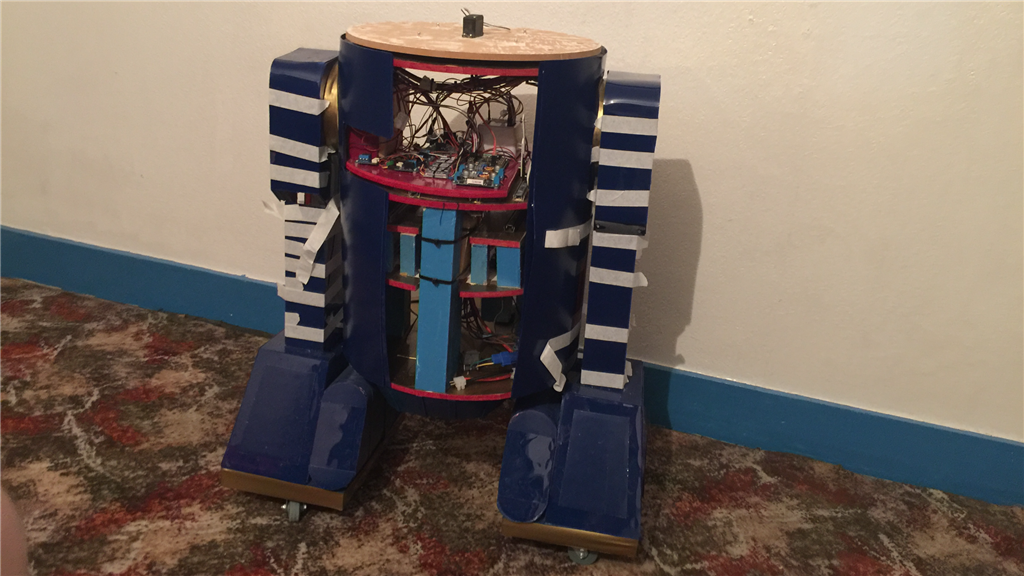
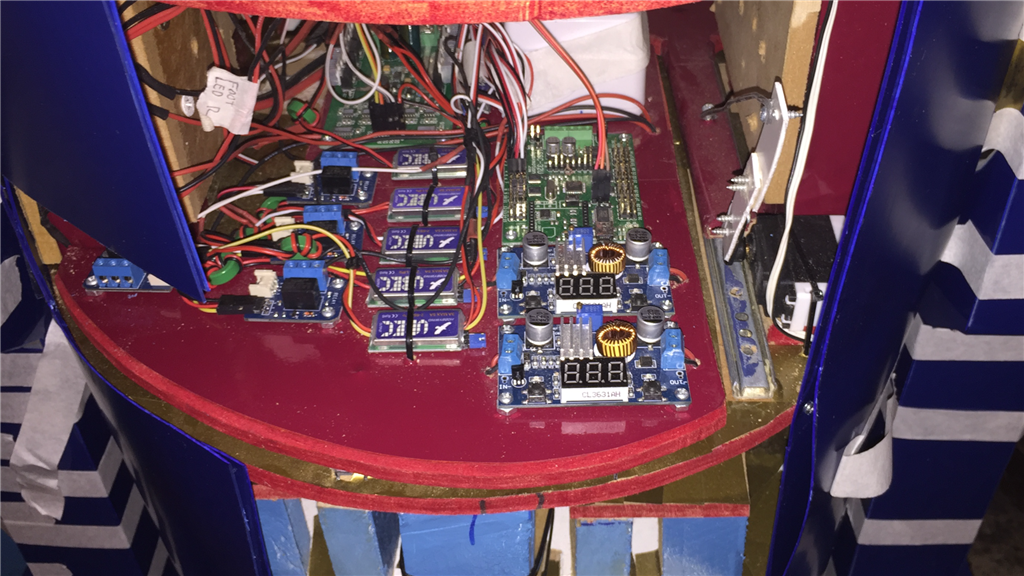
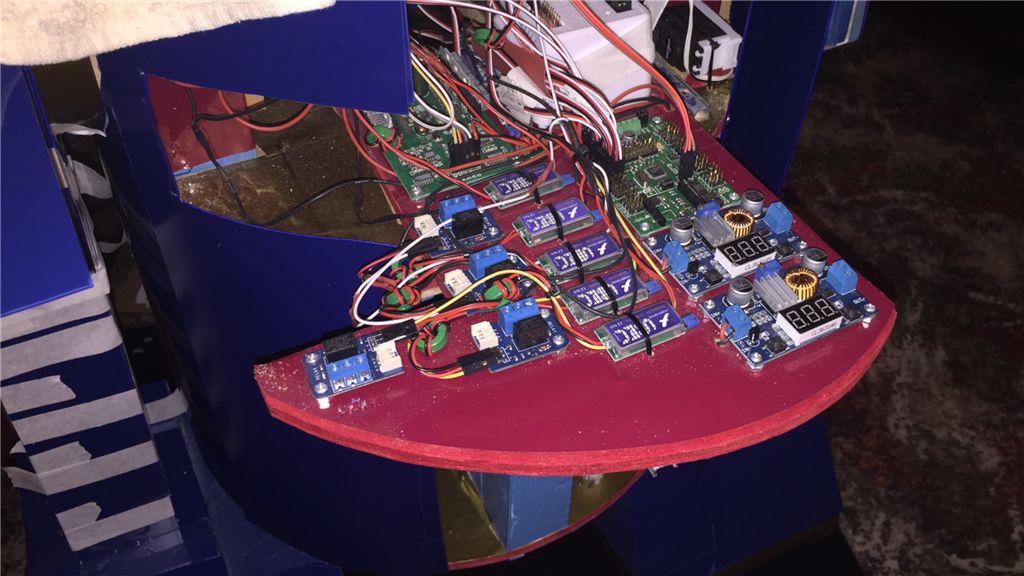
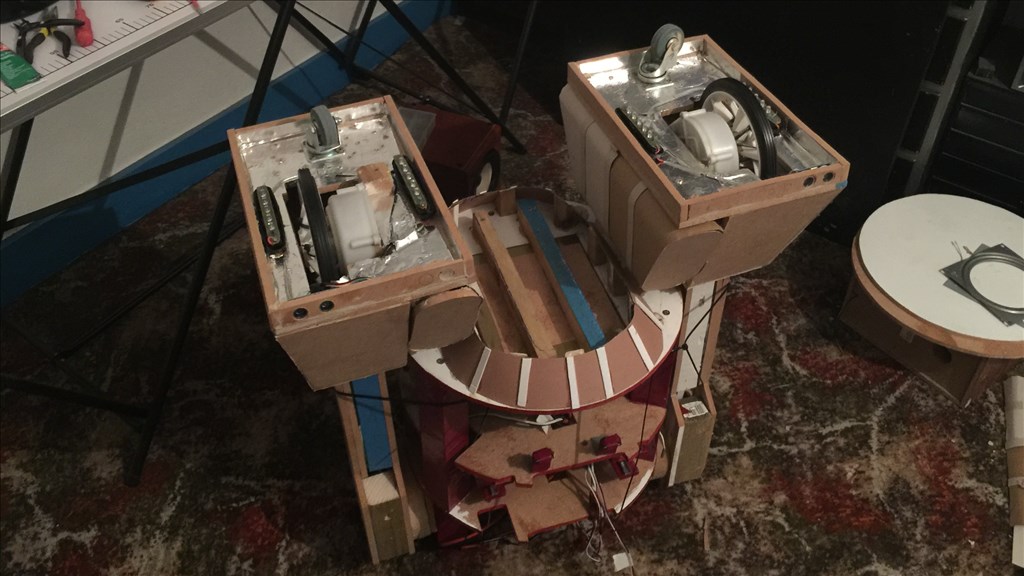
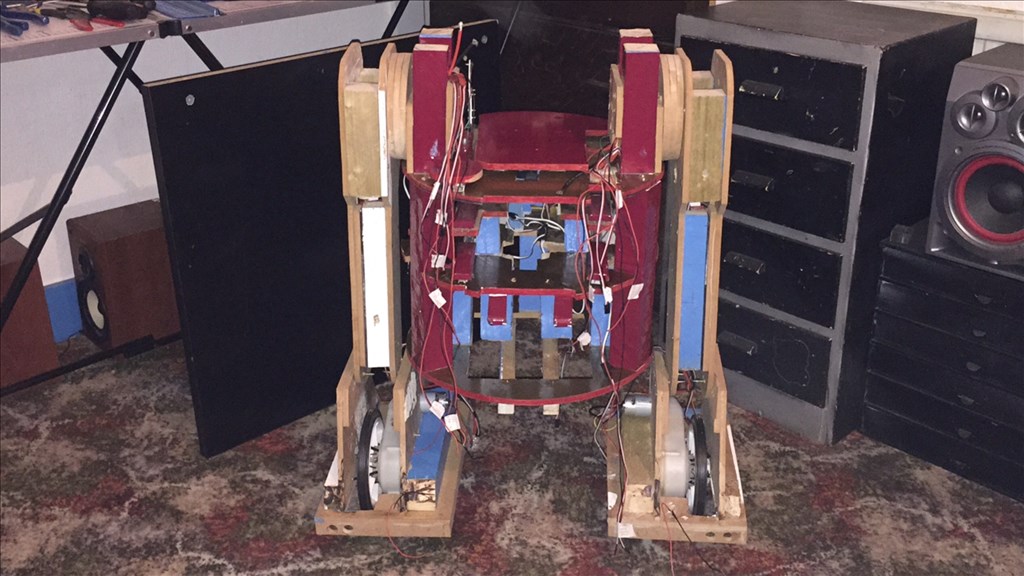
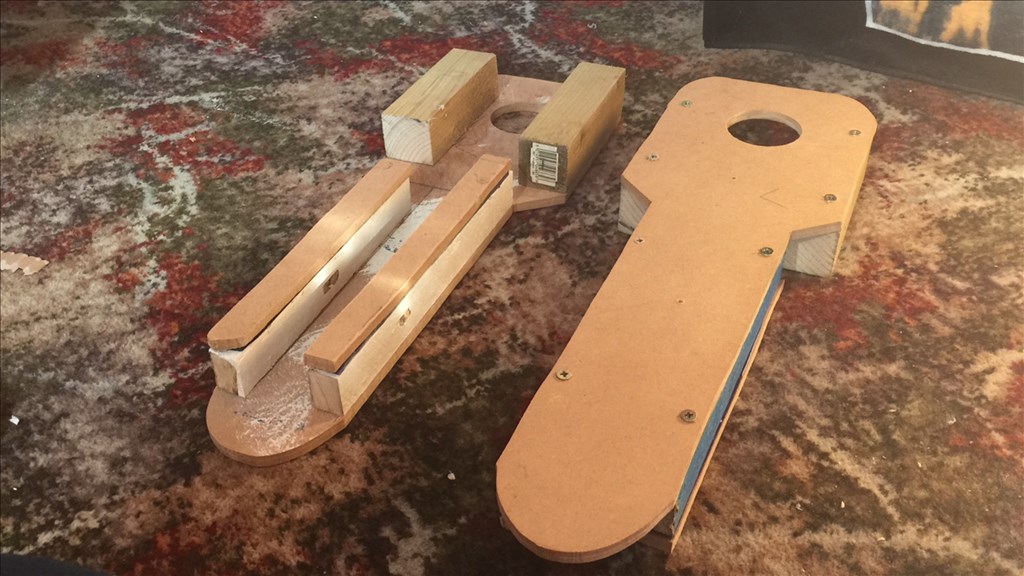
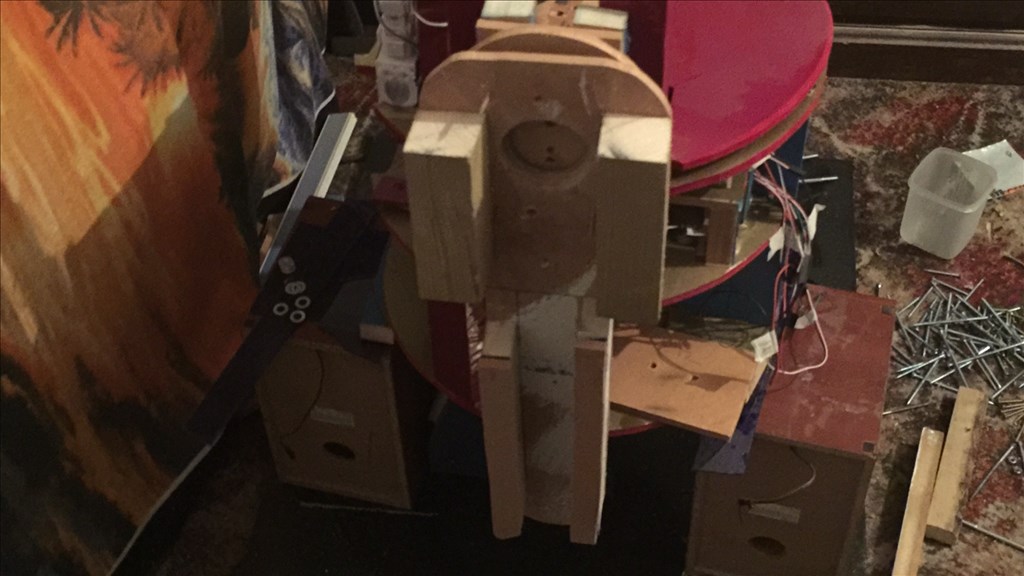
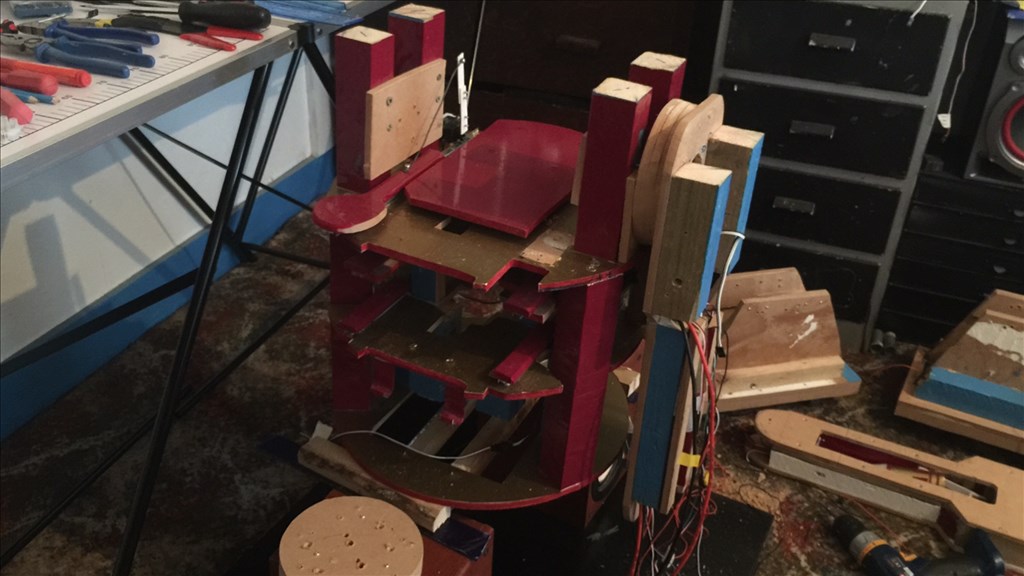
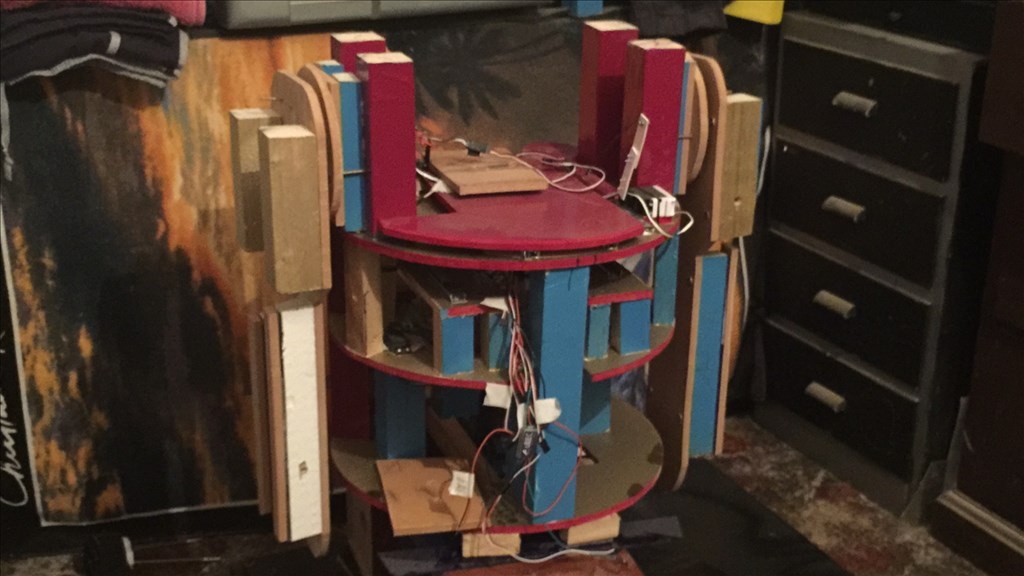
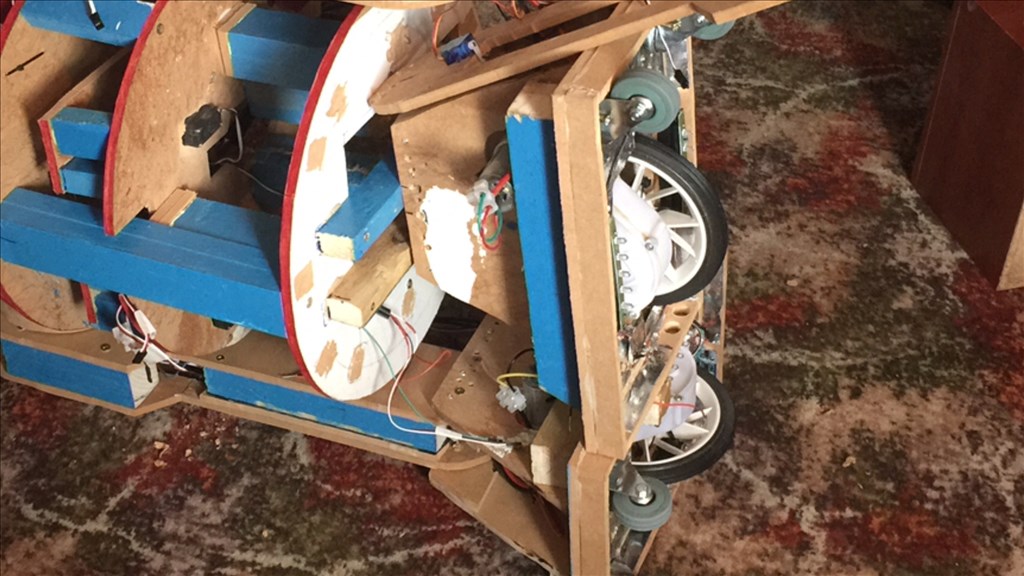
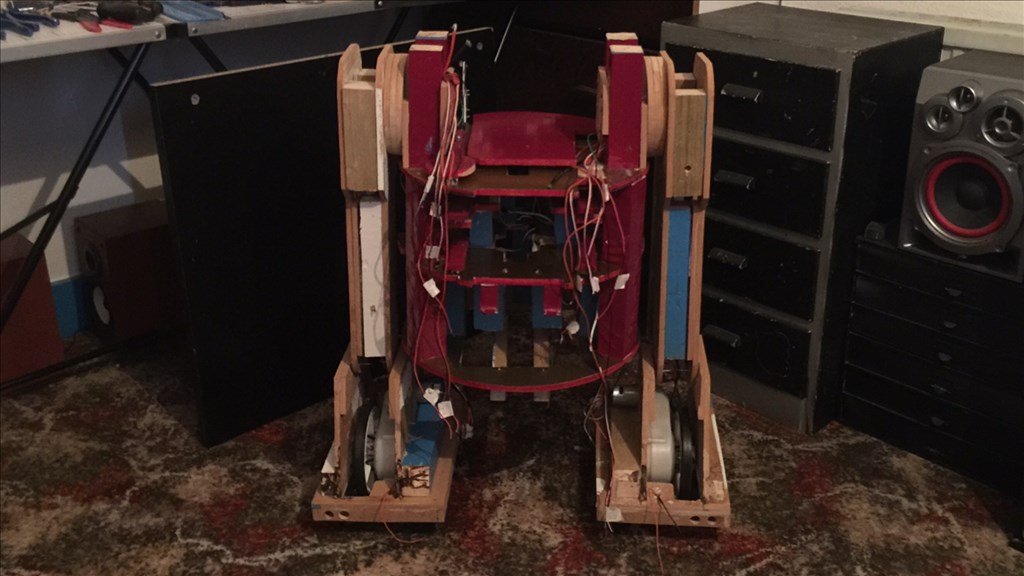
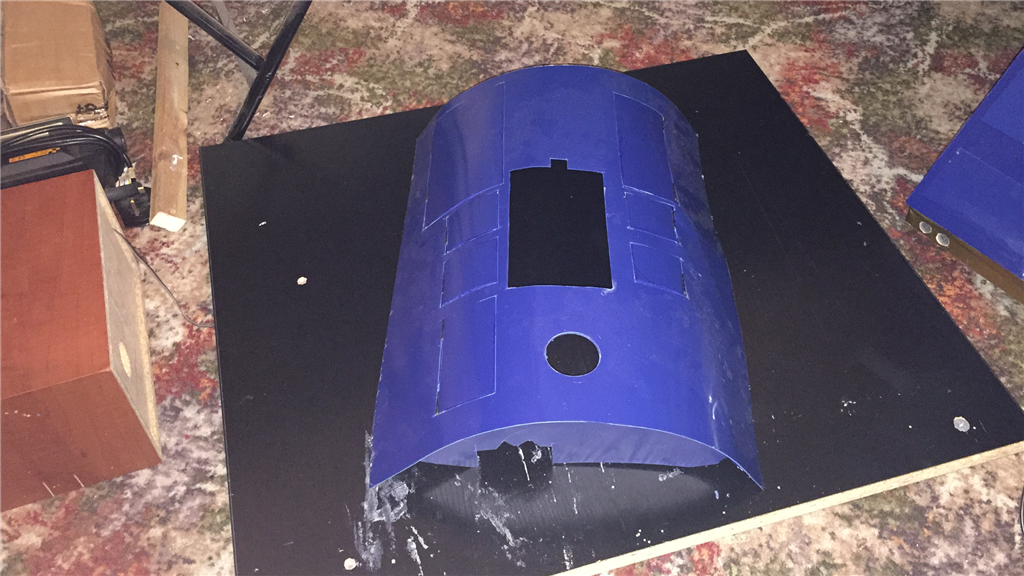
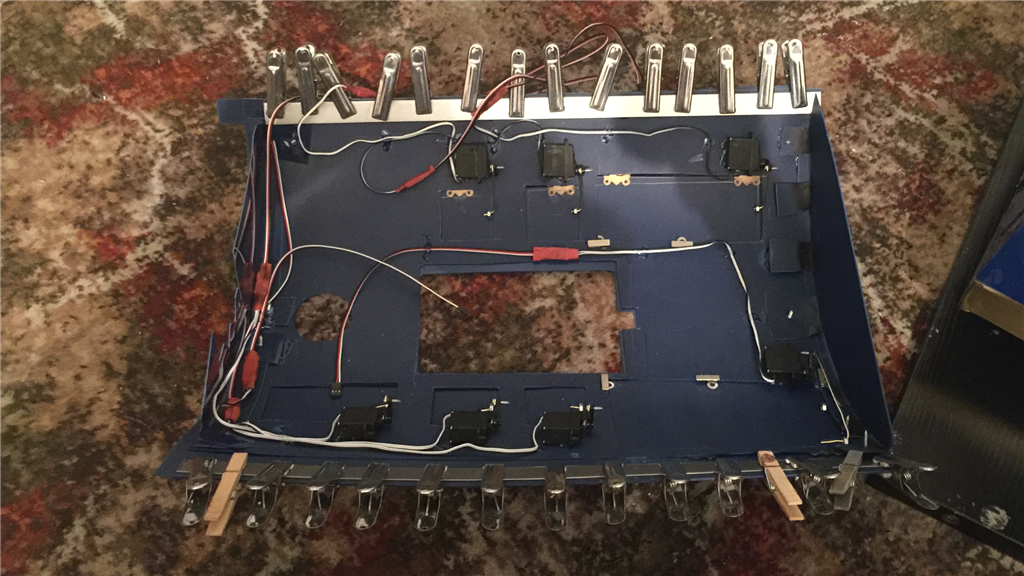
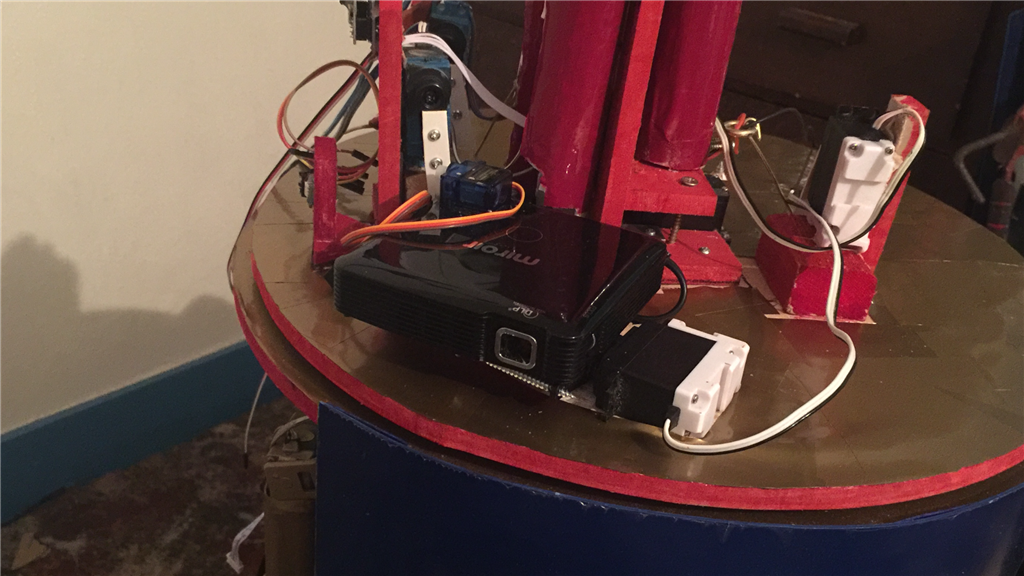
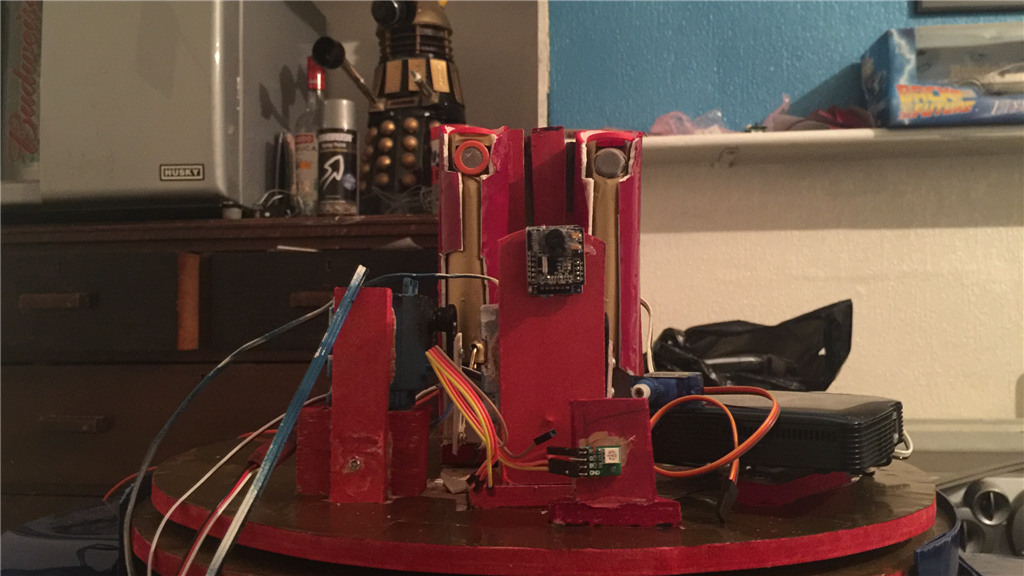
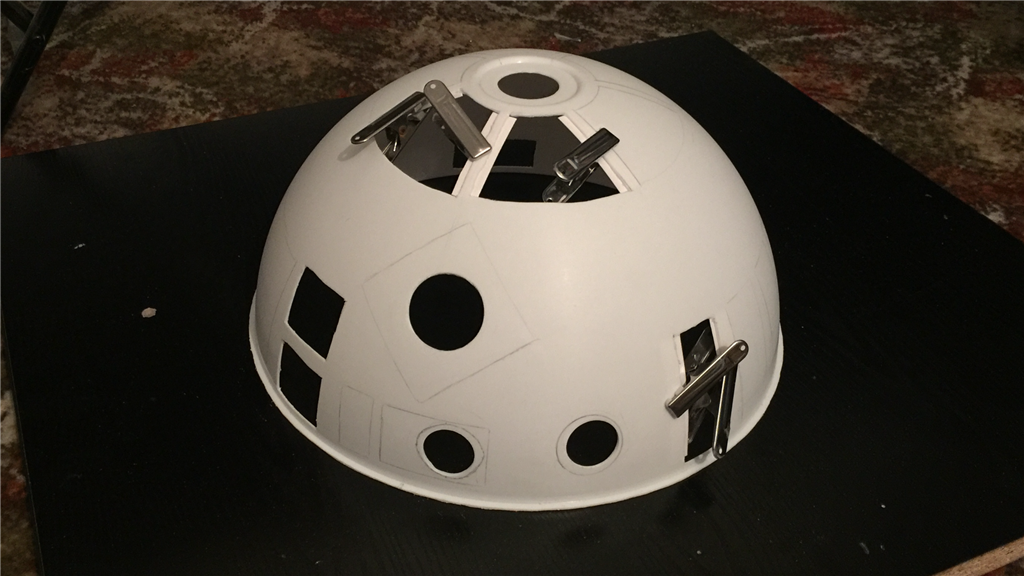
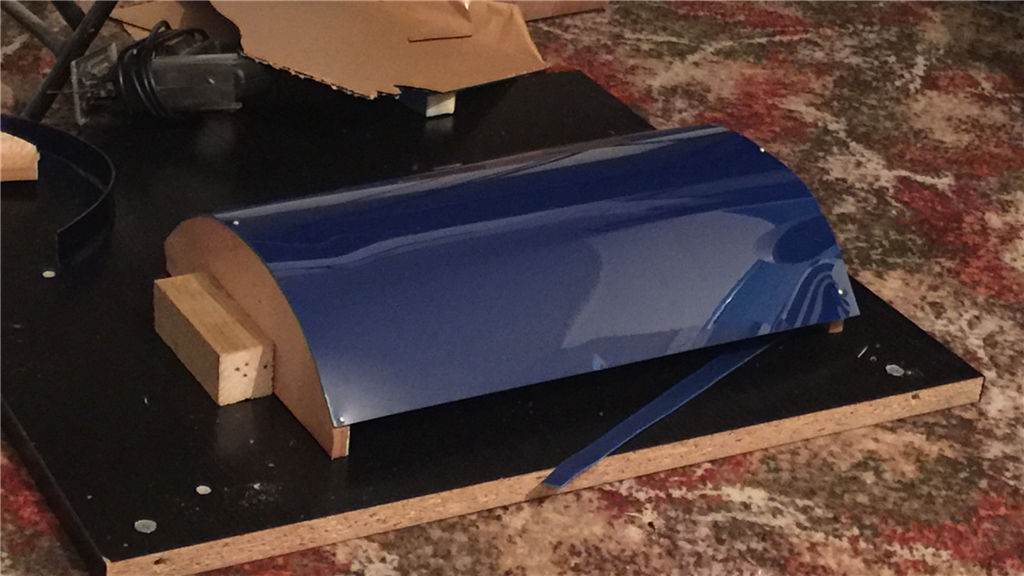
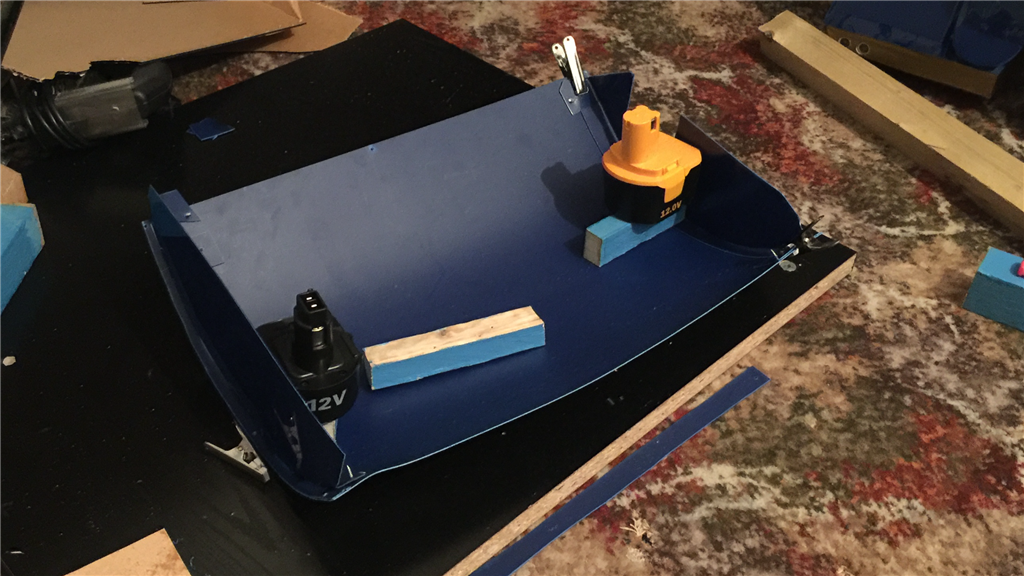
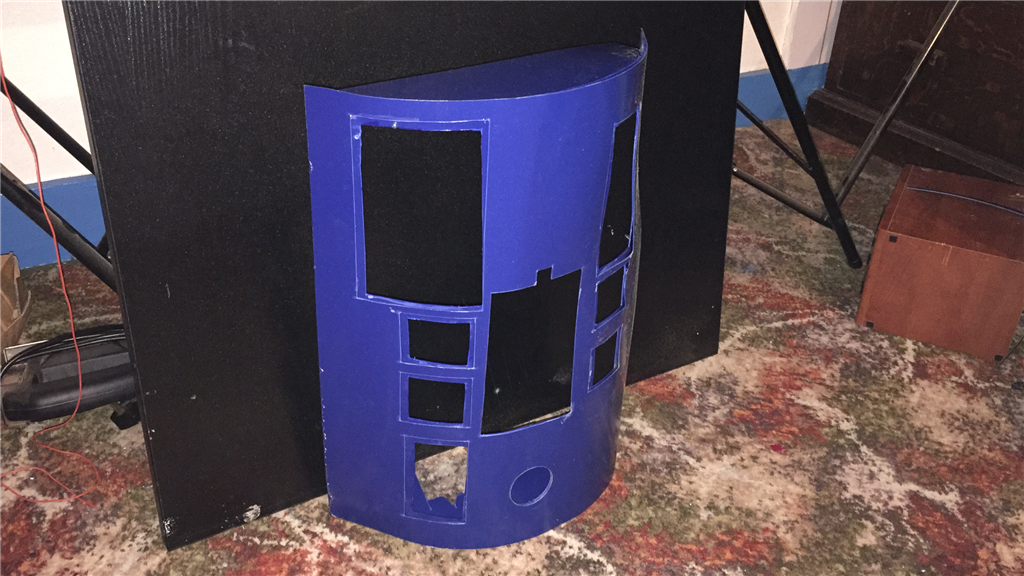
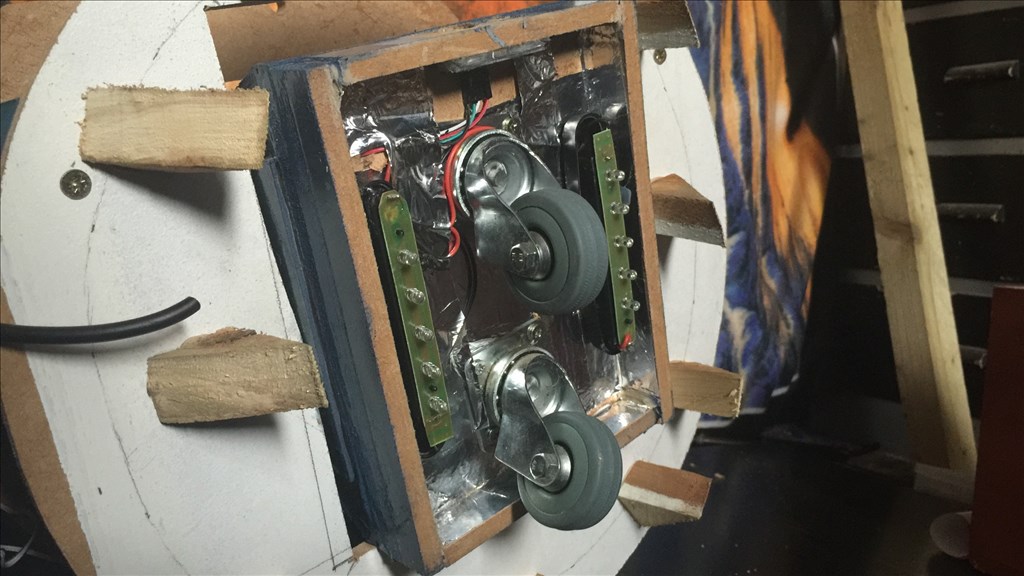
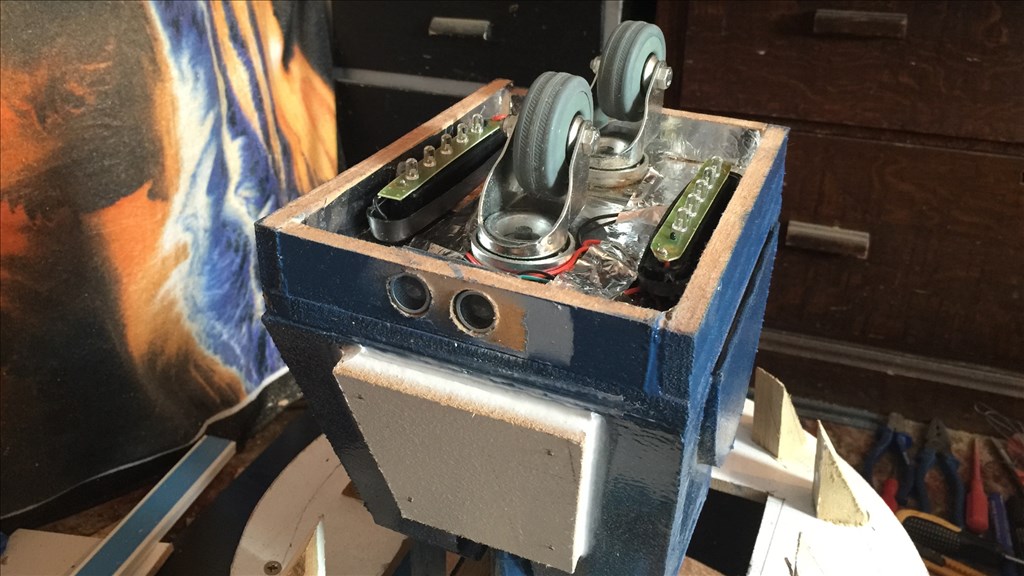
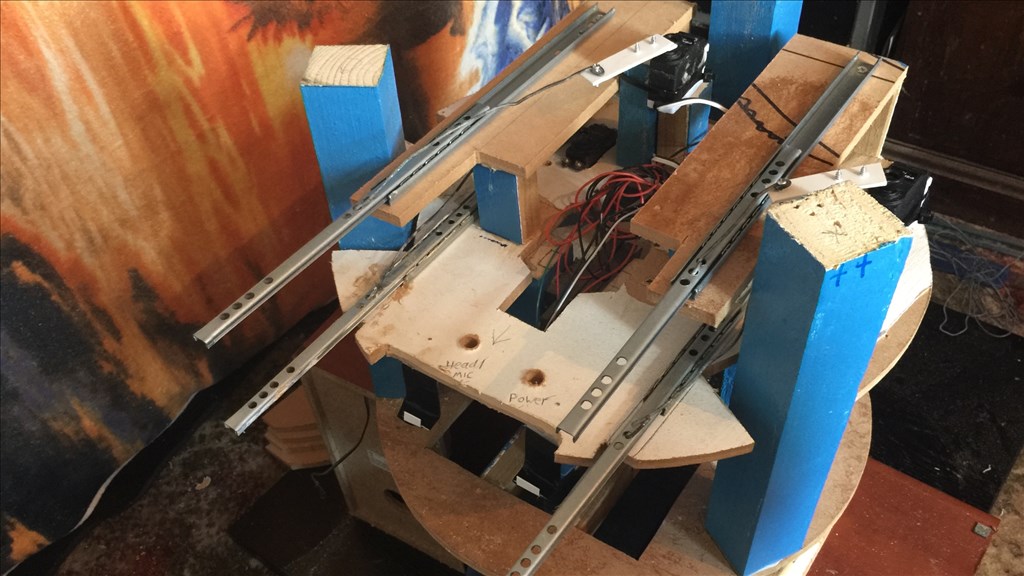
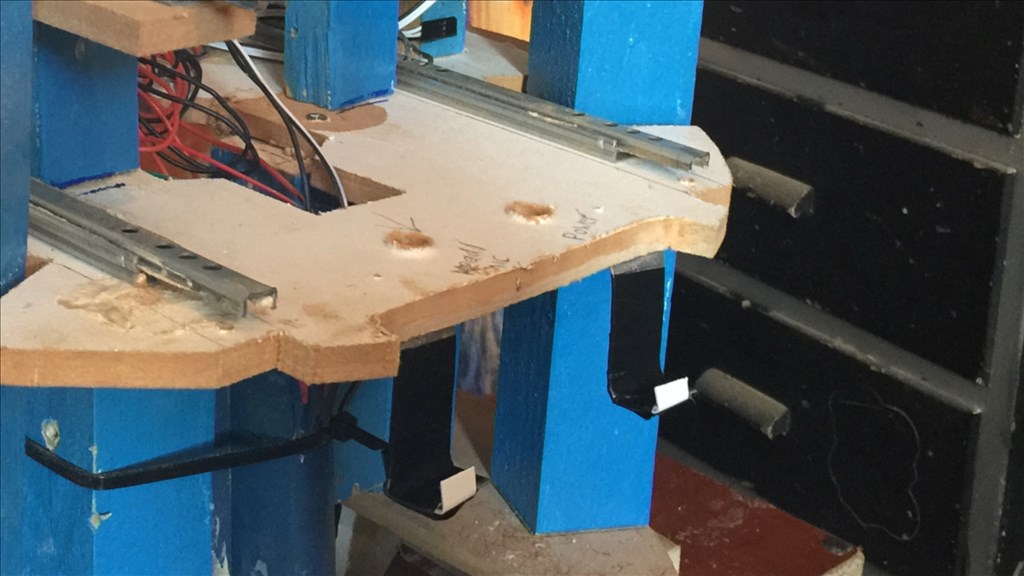
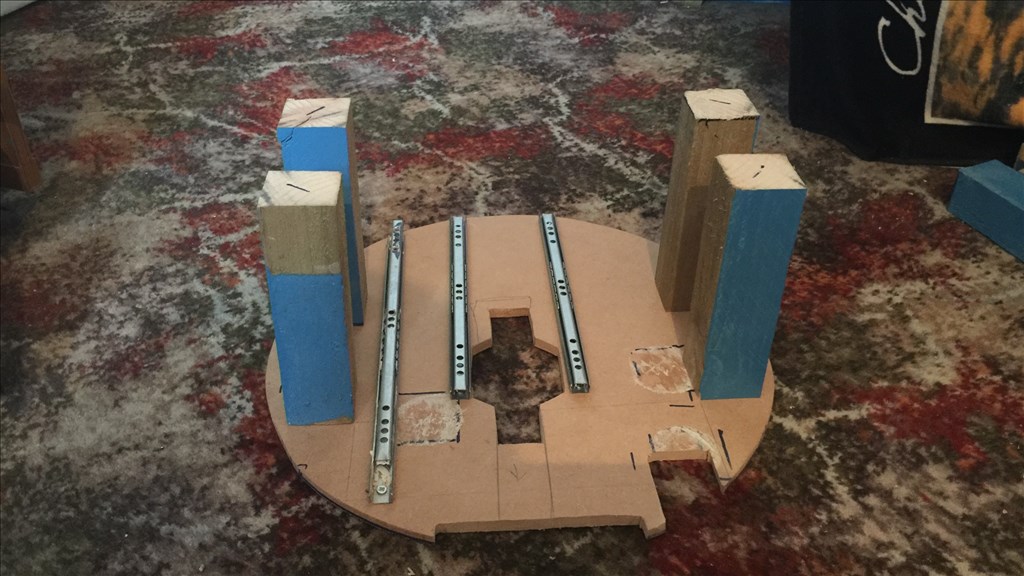
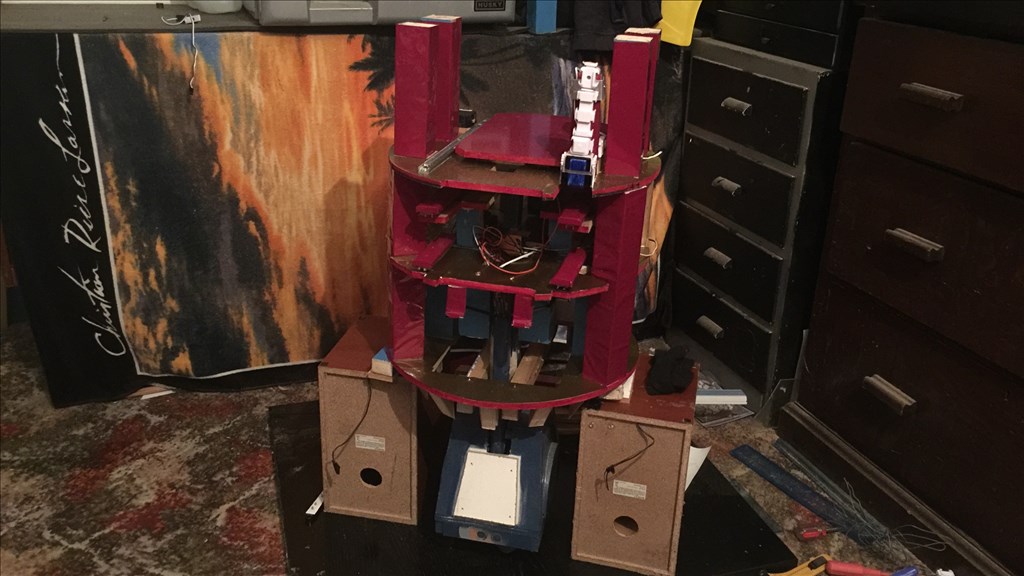
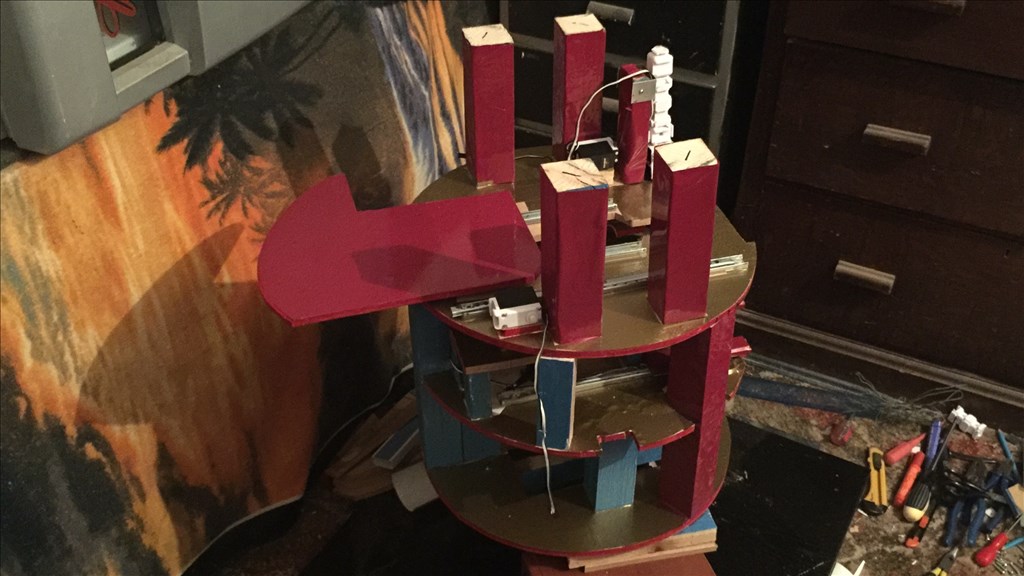
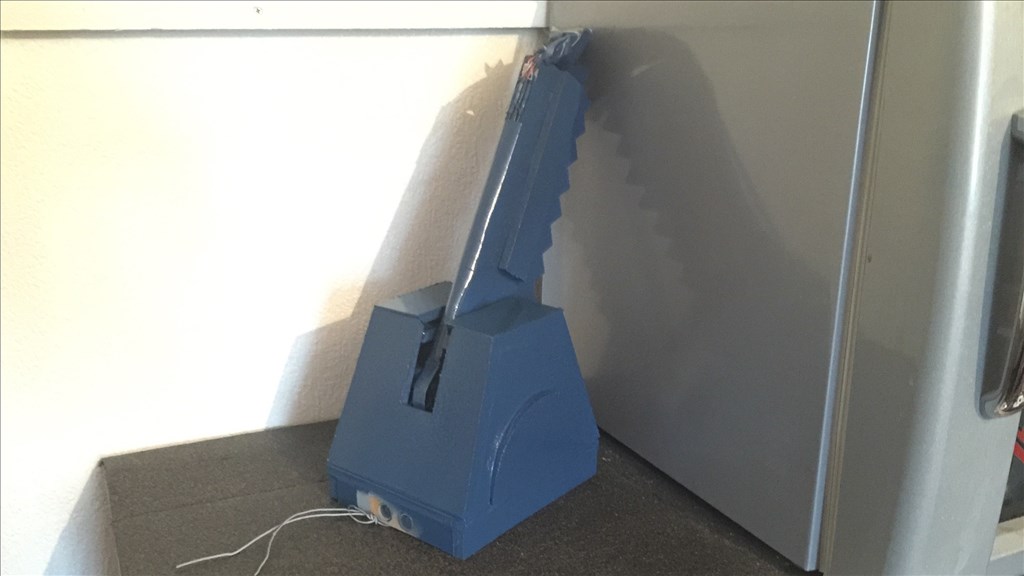
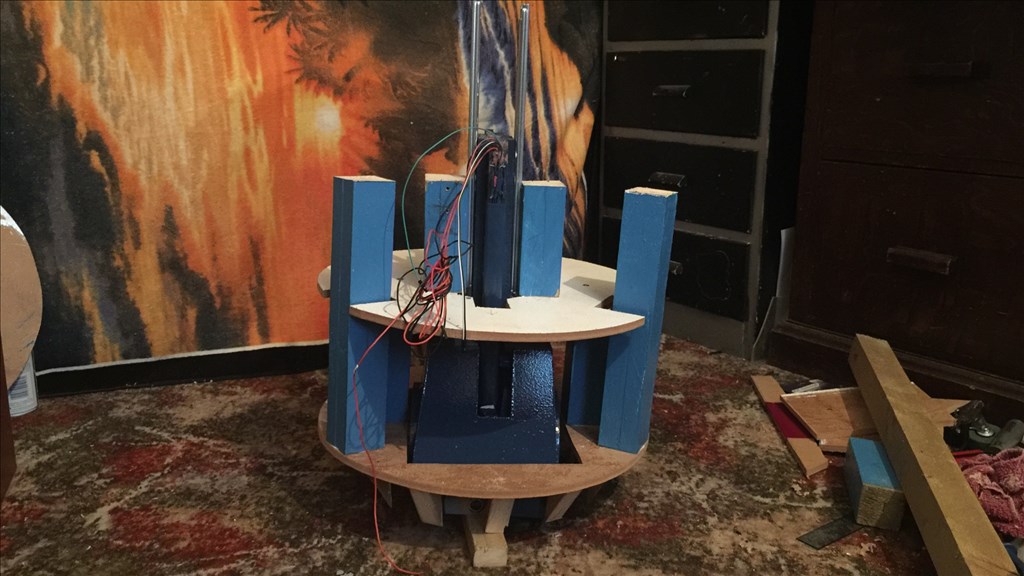
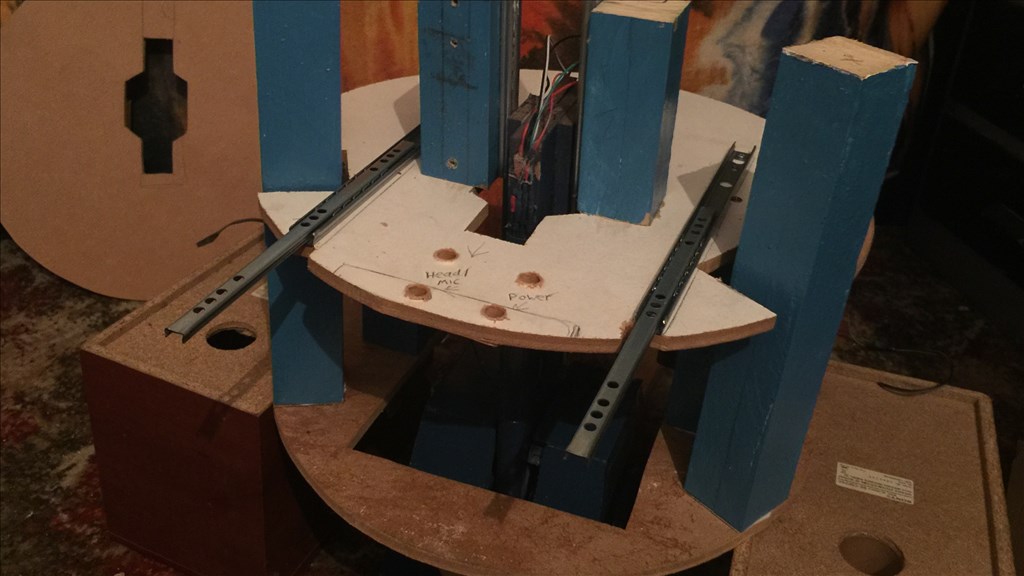
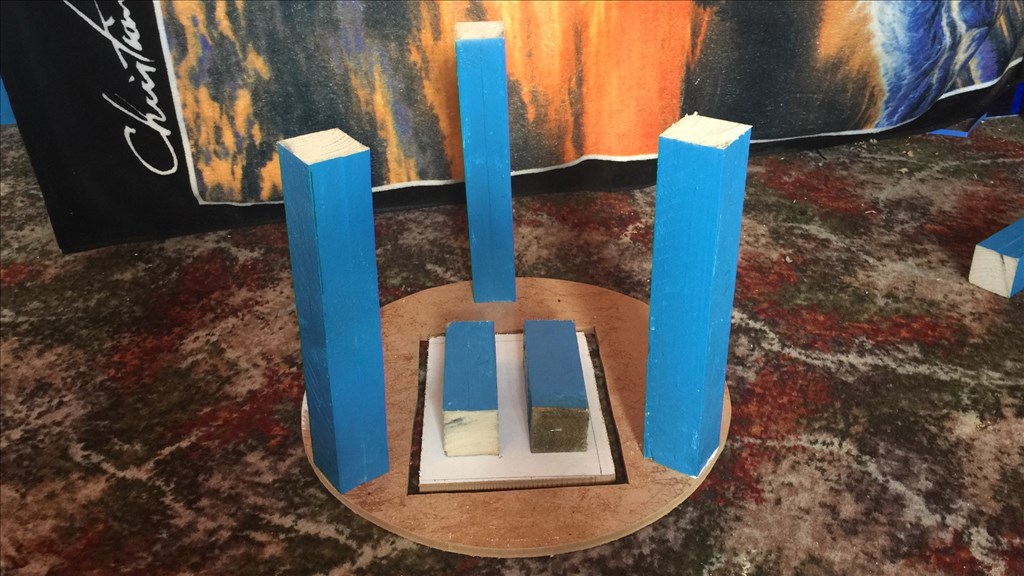
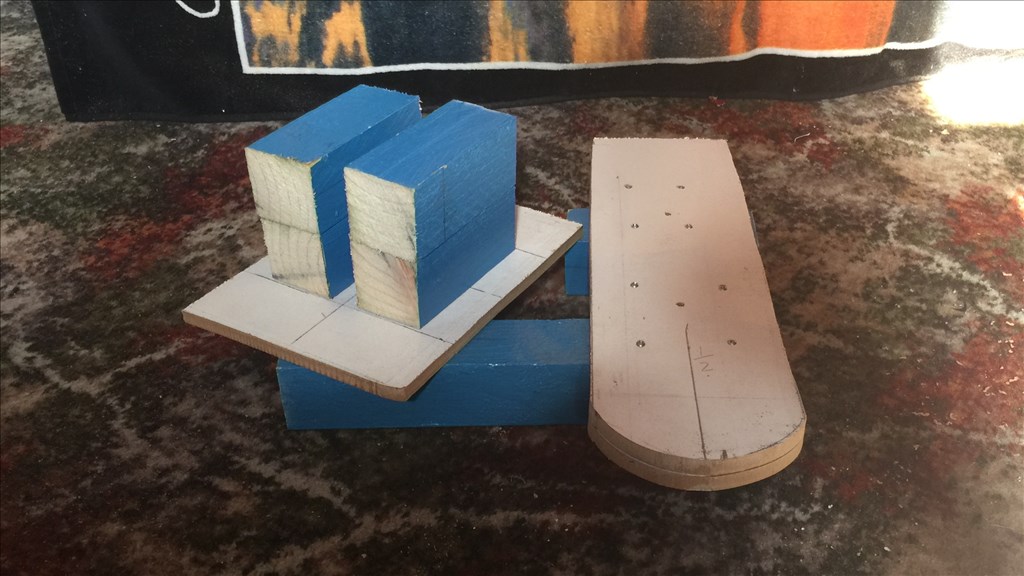
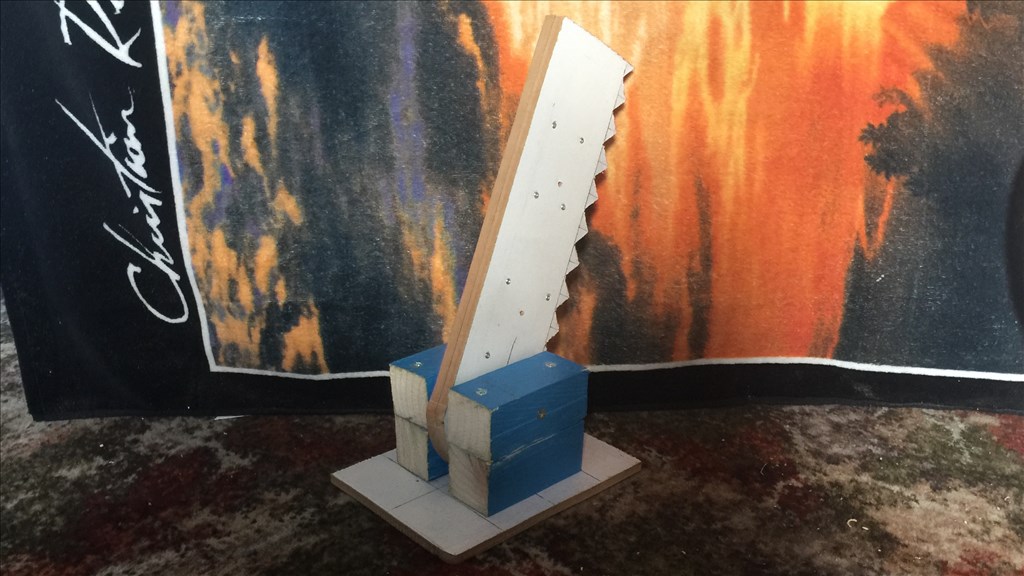
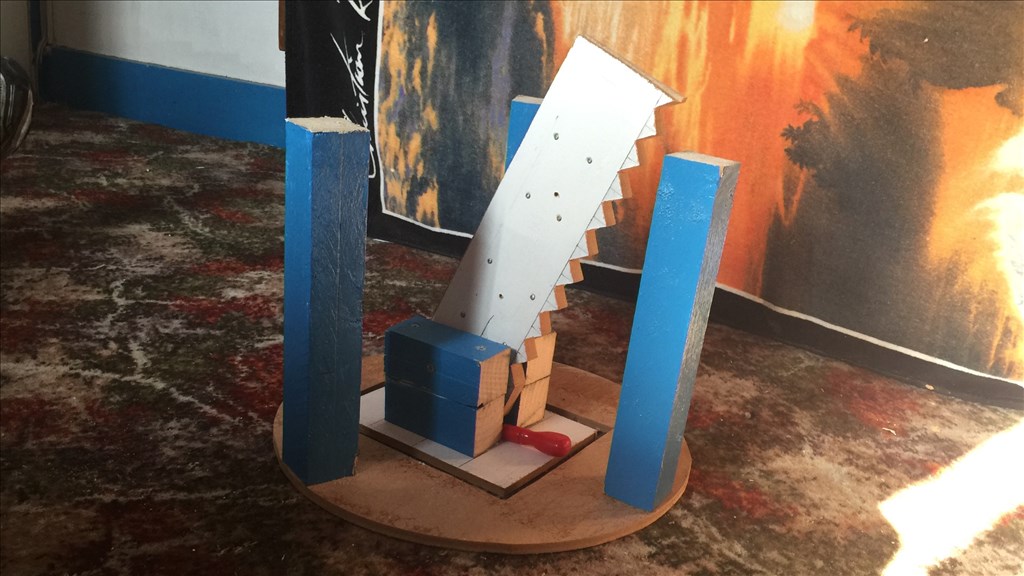
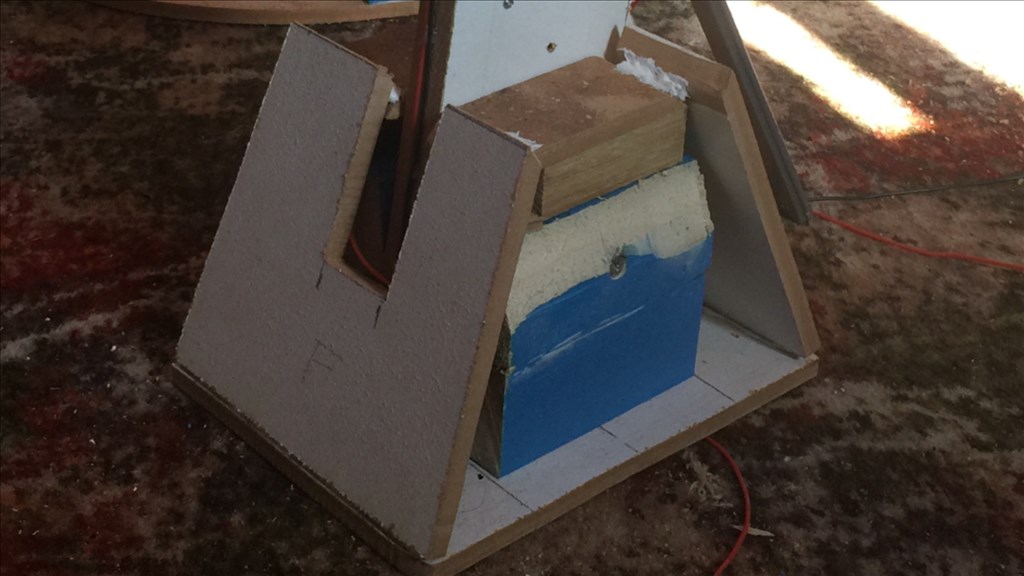
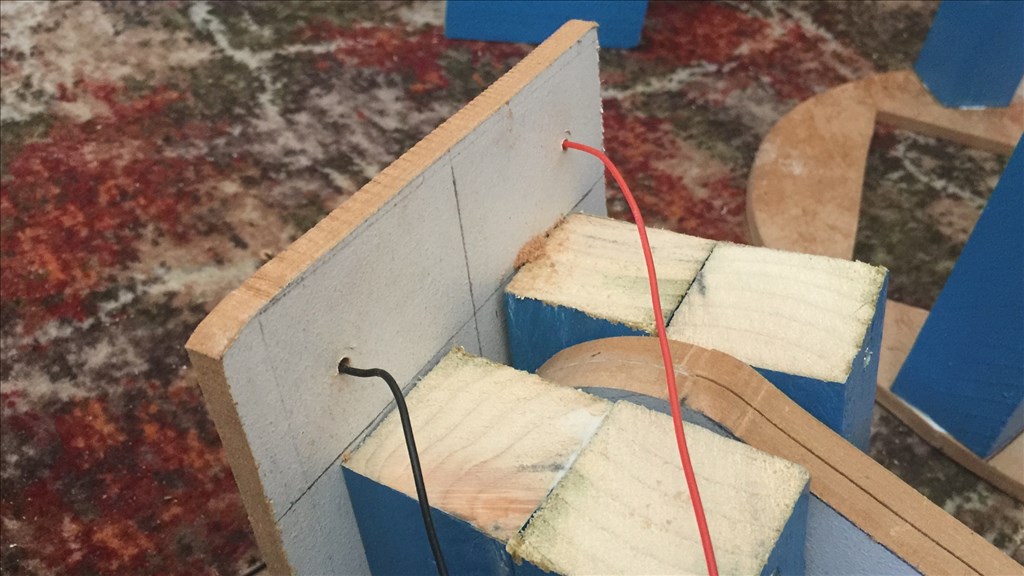
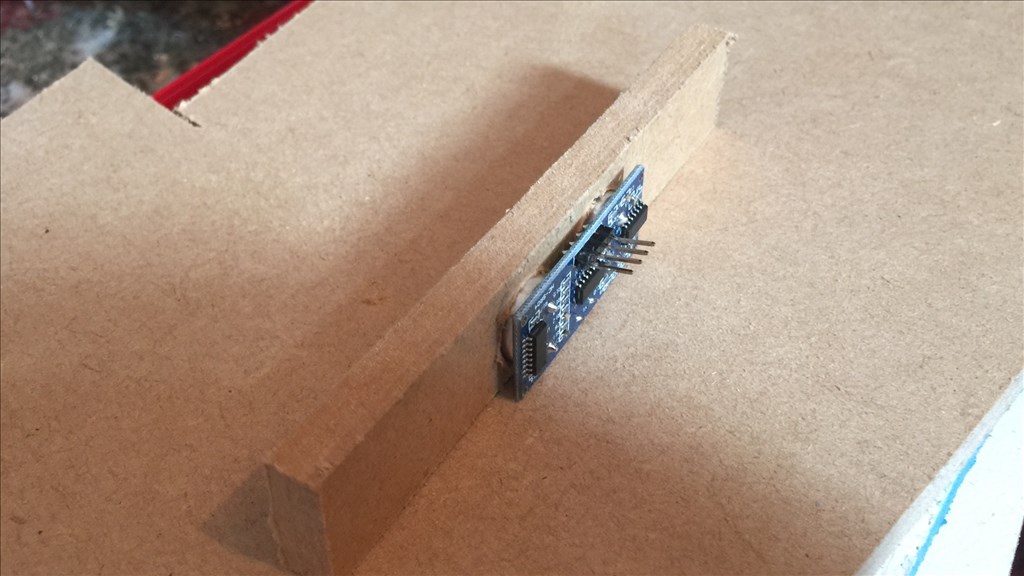
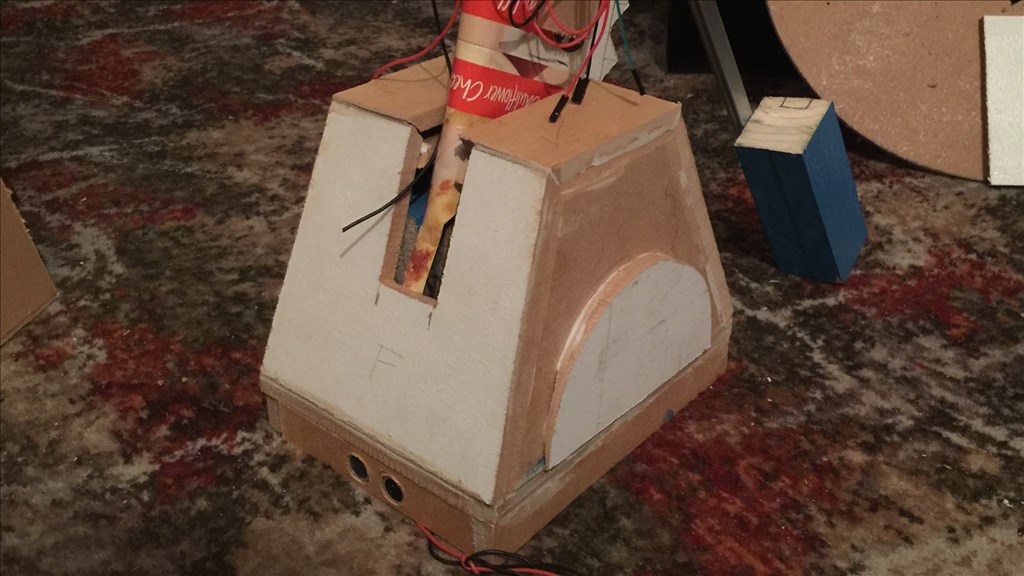
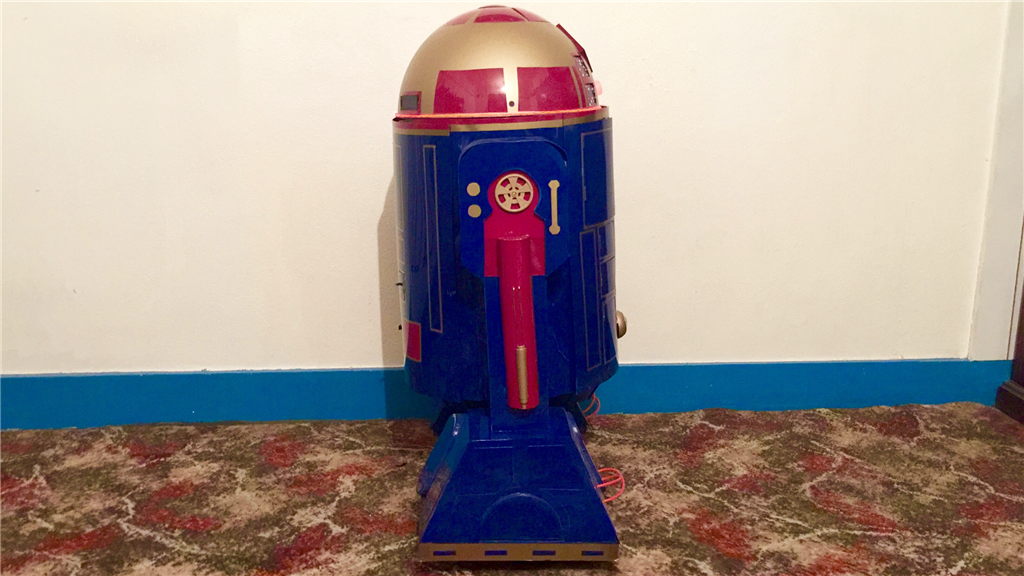
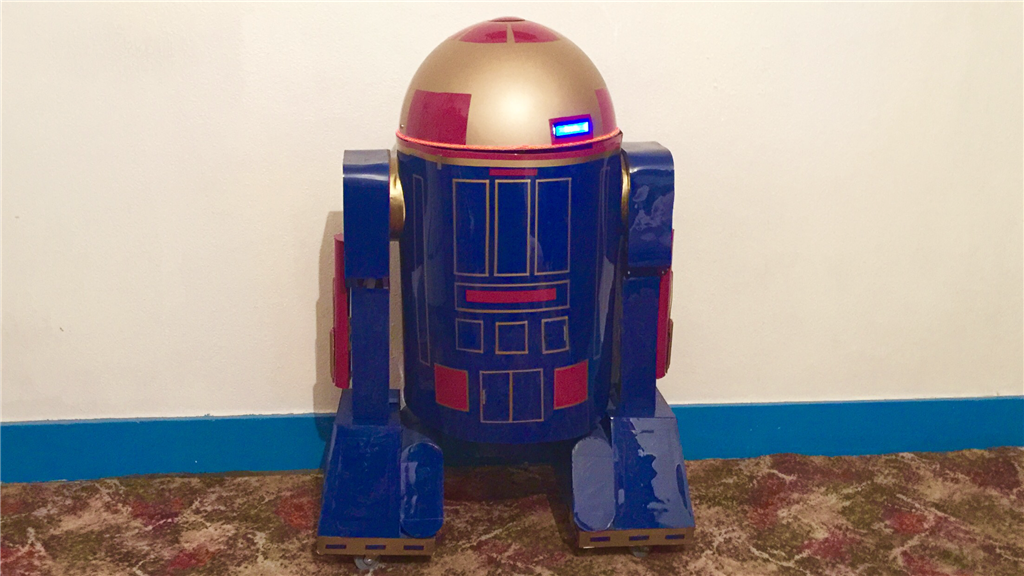
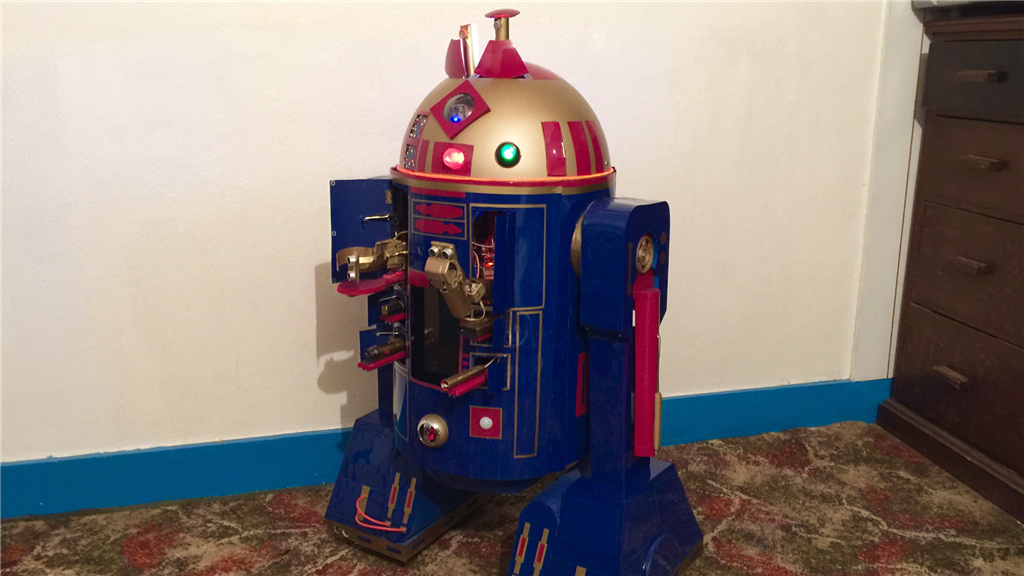
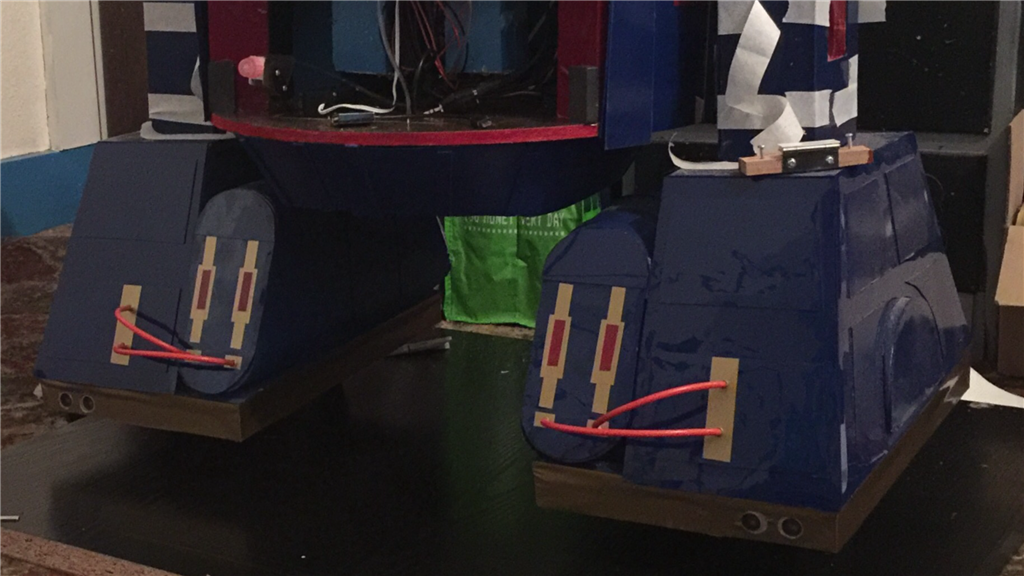
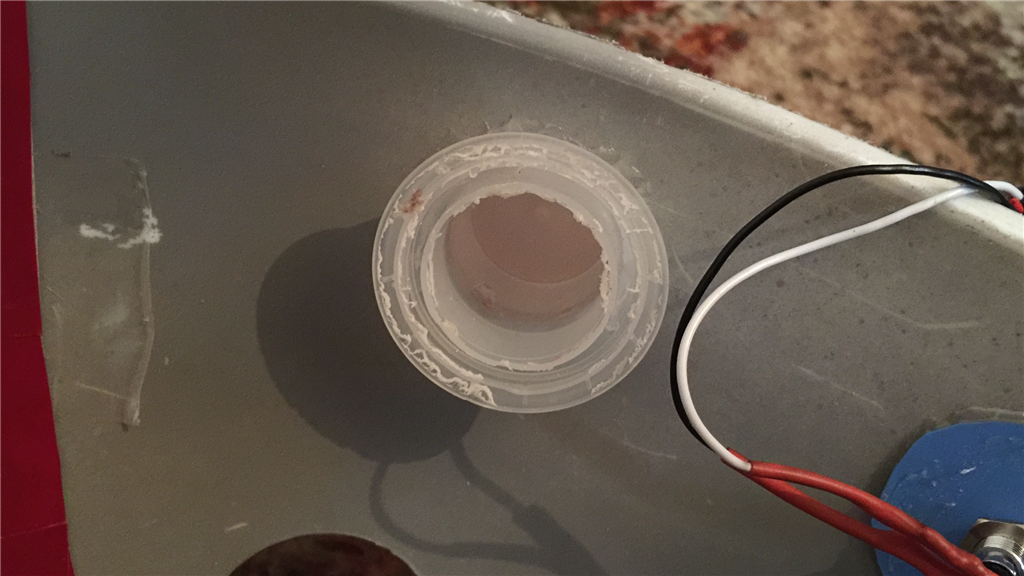
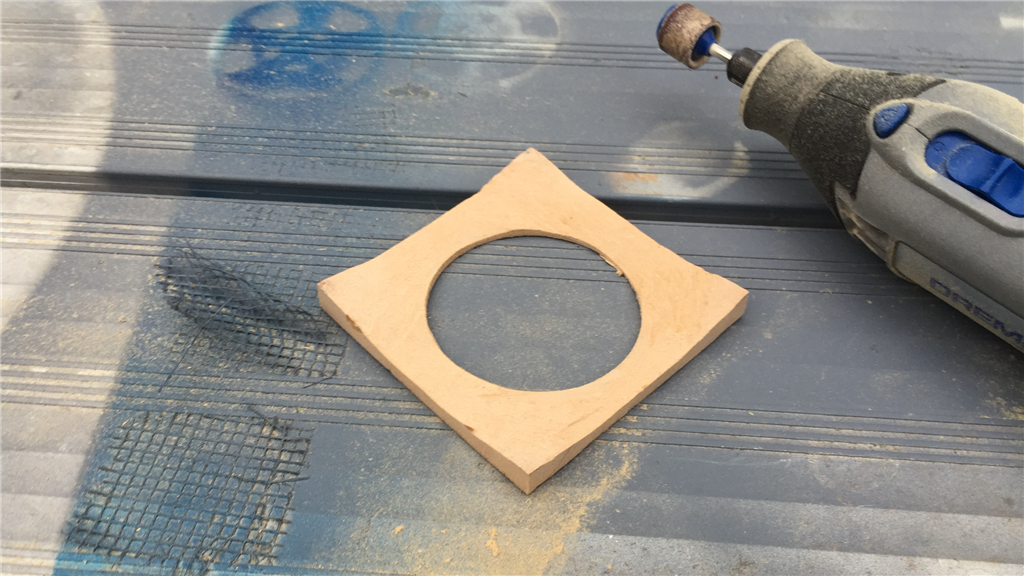
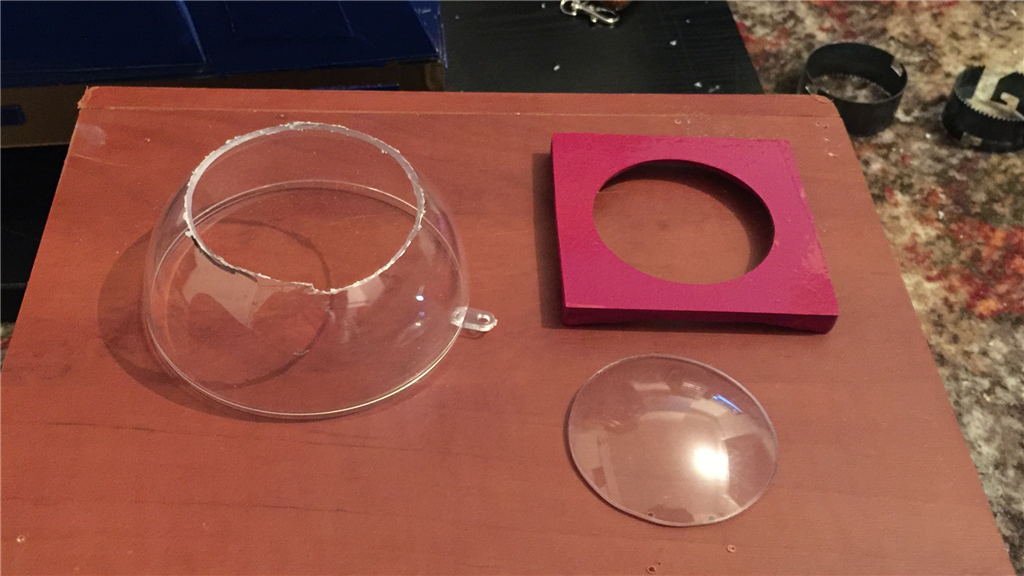
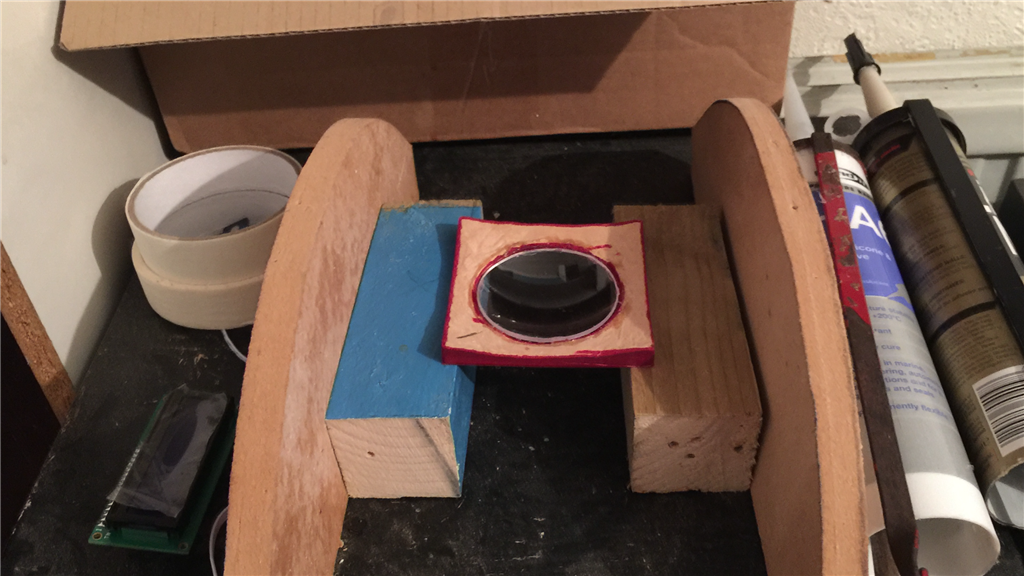
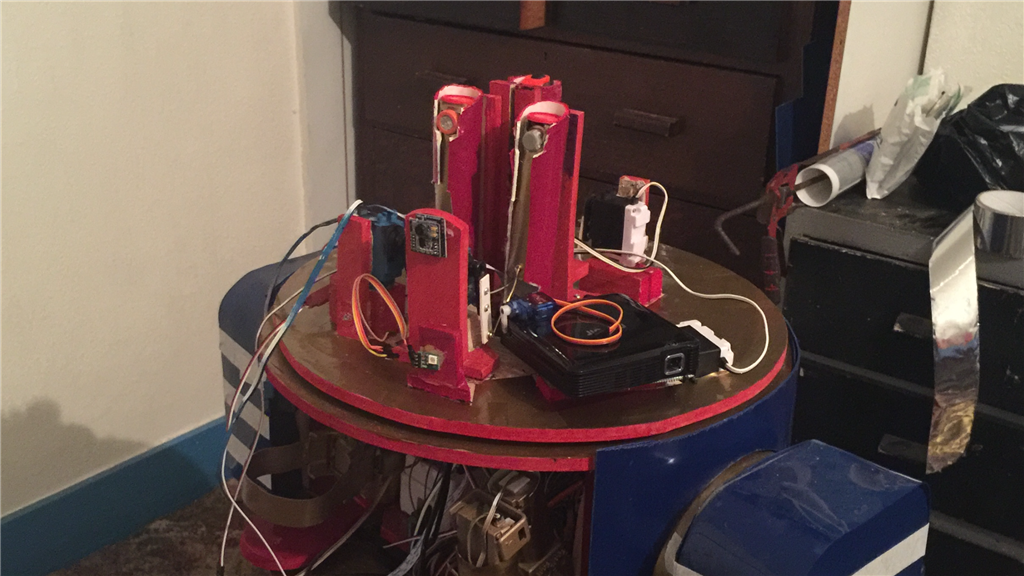
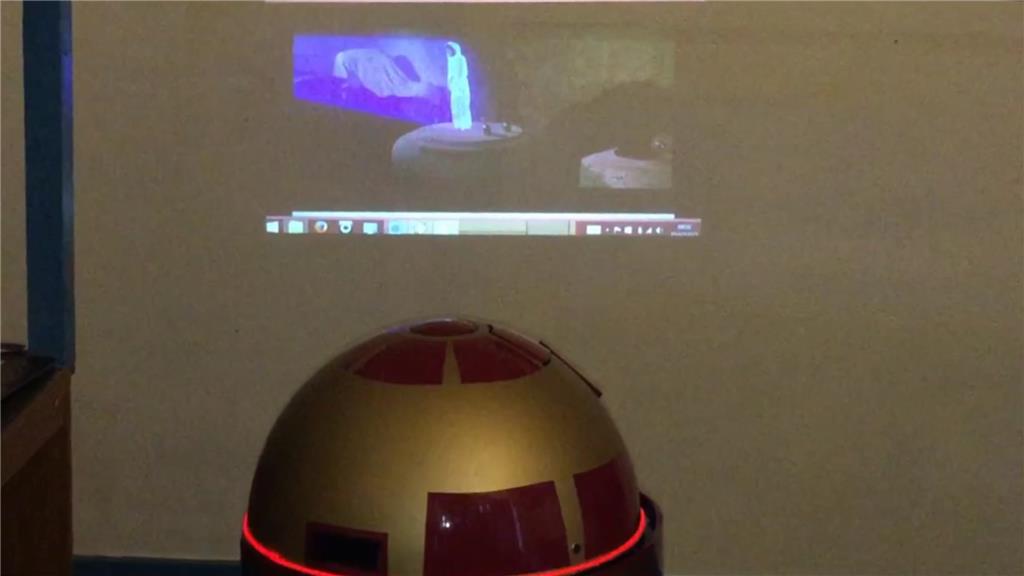
So what's with the name E4-B4 (Eiifor-Befour)? Well its kinda based on the EZ-B 4, of which this little'ish guy will have two of them. One master v4 to control motor controllers, ping sensors, v4 soundboard, camera and sensors, while the 2nd slave v4 will be used for all of the servos used as well as additional sensors. E4 will be mainly built using MDF with a plastic covering, and movement will be powered by 12v 30 watt gearbox/motors for the drive system. The "burtt acoustic signaller" and system ventilation vents on R2-D2's chest area (the two silver square'ish panels) will be replaced on E4 with a tablet PC, and the Optical Holographic Projector in R2's head will be something similar to what E4 will have, using a portable projector like the Aiptek or the Pico Genie, so no holograms... yet.
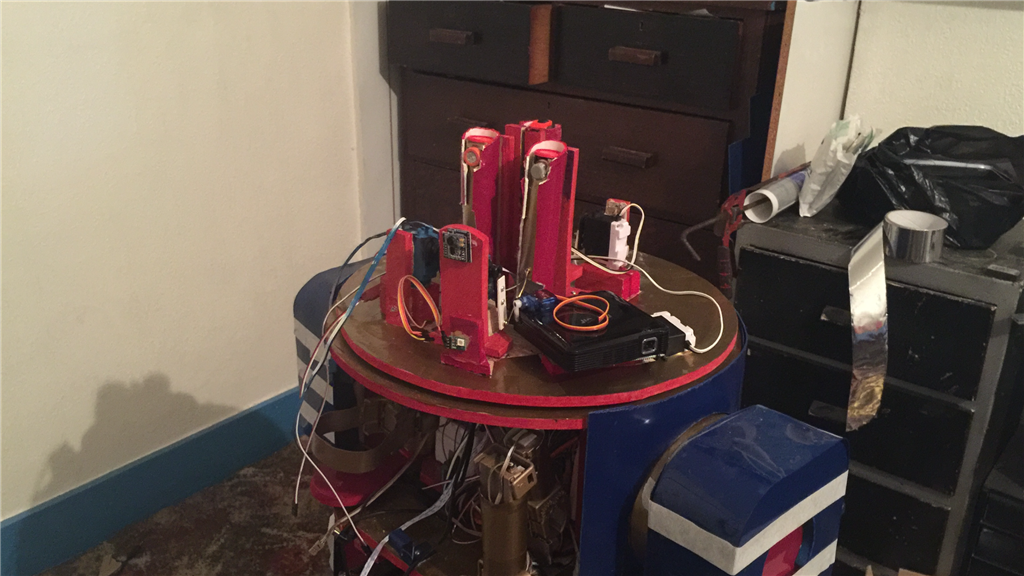
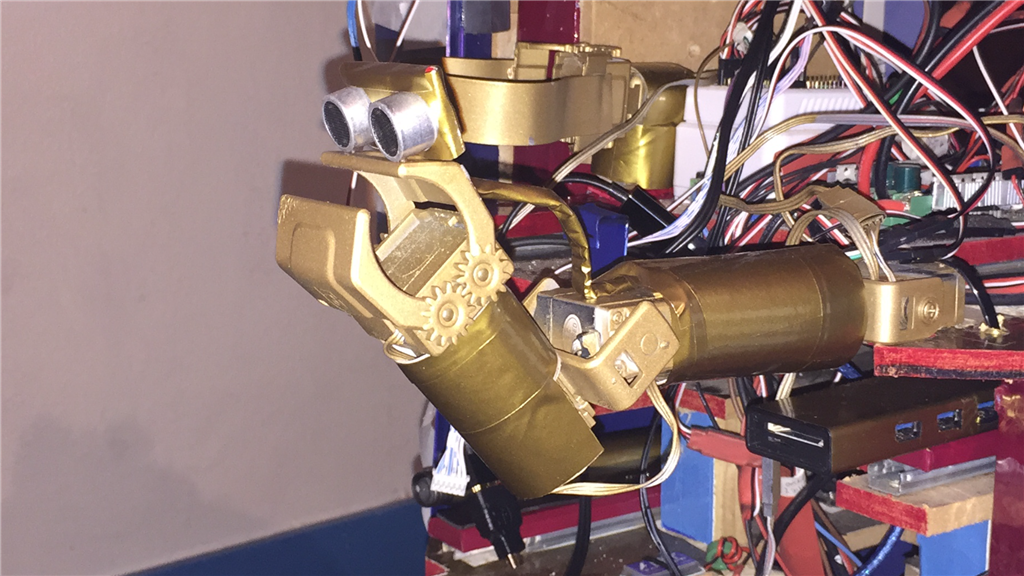
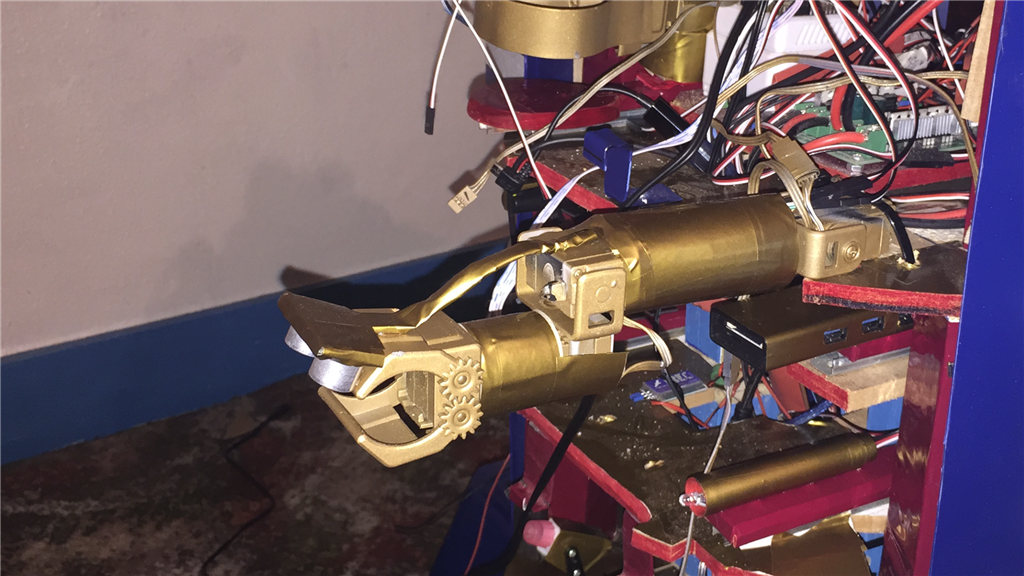
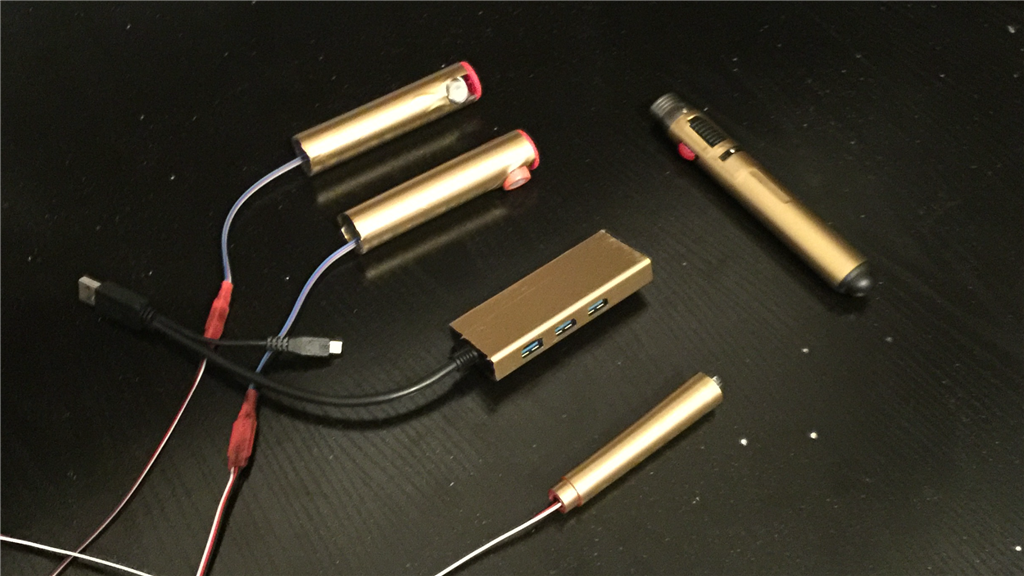
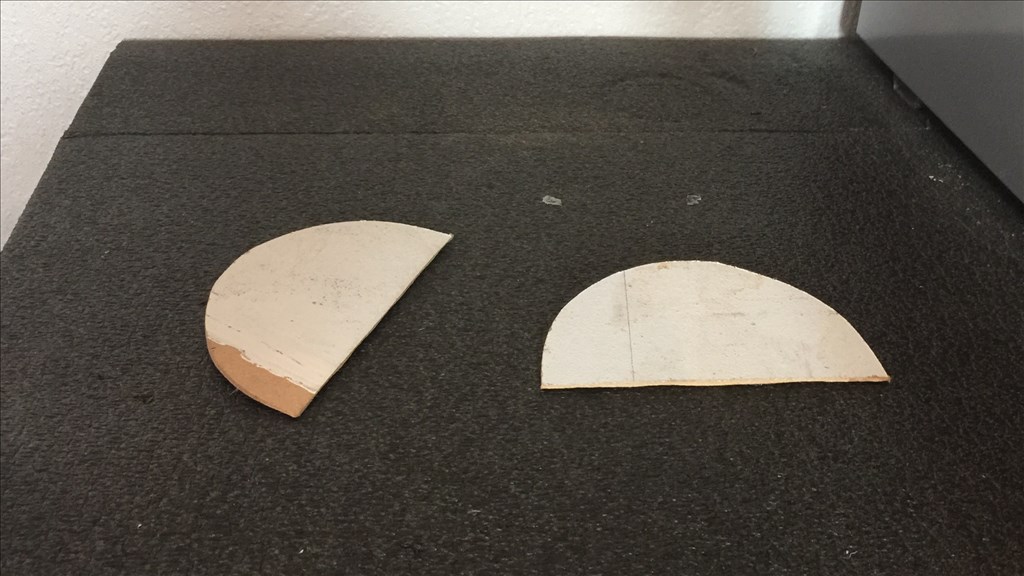
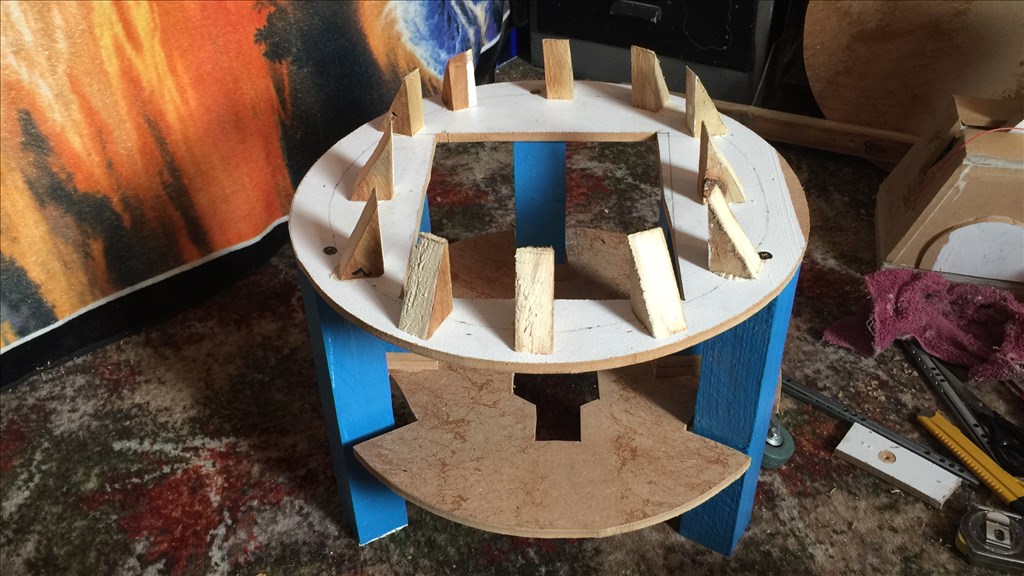
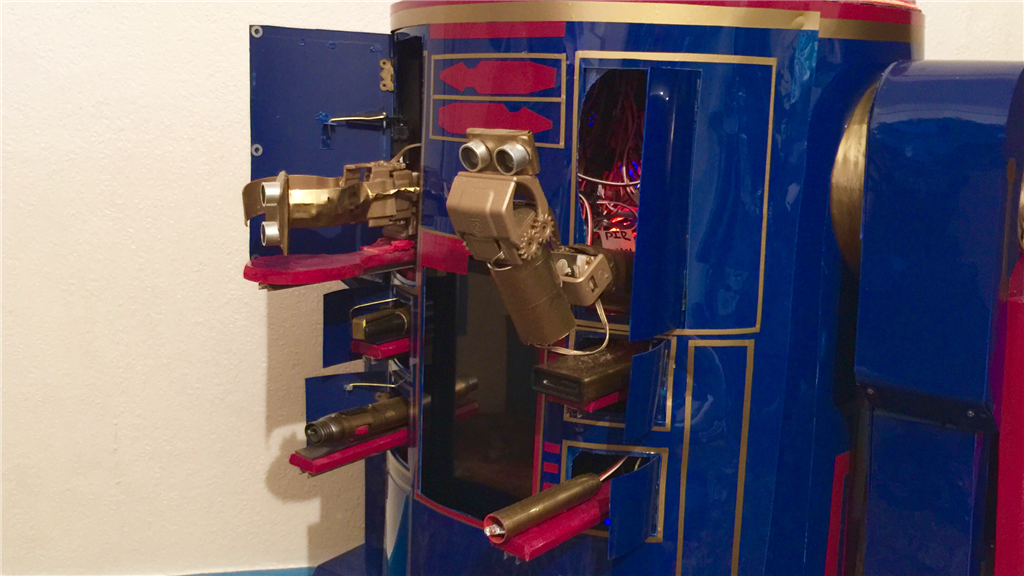
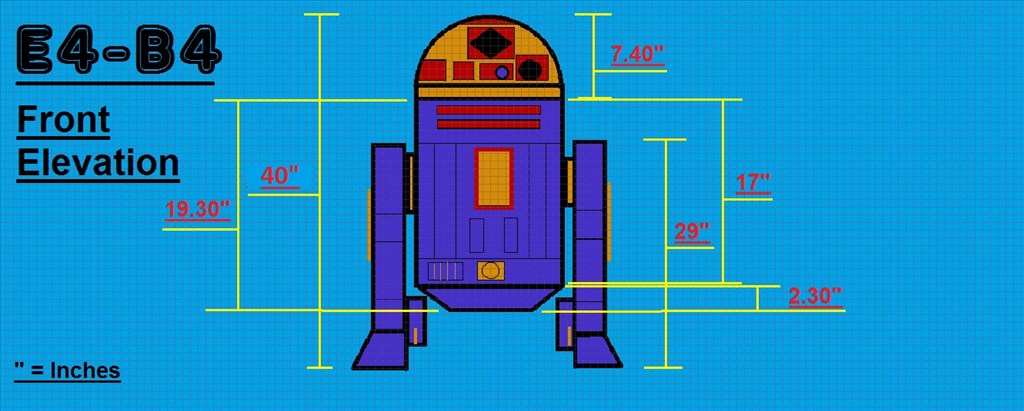
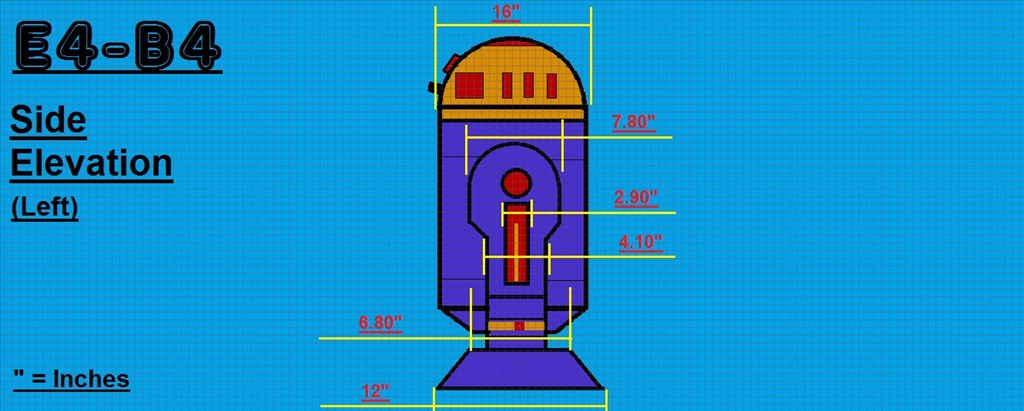
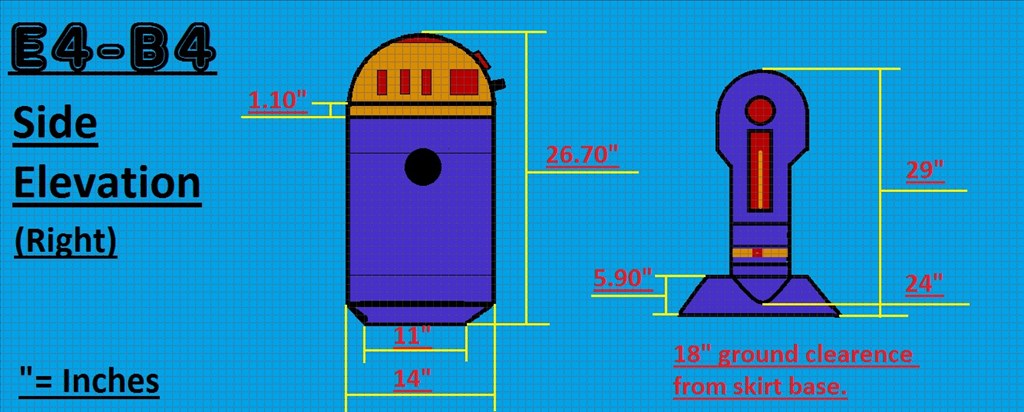
The dimensions will be slightly smaller than the original prob, but not by much so E4 will be plenty big enough. I'm intending to fit a few useful tools that he will be able to deploy, and of course have the fully rotating head which will have all kinds of bells and whistles. I have some of the MDF sheets and 2x4 wood lengths for the frame already, and the motors and head dome (lampshade) should be with me sometime this week, so it will be power tools at the ready. I'm in no rush to finish this project, but I am aiming to have E4-B4 pretty much finished by this December.
I will posting lots of photos and few videos throughout the build process, so I hope anyone reading will find this build dairy interesting and enjoyable. And as always, I'd love to hear your thoughts and suggestions (especially on the colour scheme). Anyway thanks for reading, and let the build begin...
Steve.
Discover more robots
Fisha's Wall-E Wall-E From Poland - Tribute To My Newborn...

Jdebay's Garden-Bot Aka Gb Robot


Okay, I've just watched the video for the 6th time and enjoyed it every time. This R2 is so great. You put it together in record time and from odds and ends you had around, which is simply amazing. The finished product looks and functions very nice to say the least. Like everyone else, I very much look forward to more videos. Maybe you can eventually do something with the K9 and R2 in an interacting mode. They could play rock-paper-scissors or some such with each other maybe. That, or plot world domination. Gotta watch these guys. I caught my JD, "Skippy", trying to buy a Fembot on Ebay the other day. Should have never gotten him that subscription to Playbot.
Sorry to hear about your back problems. That must make it all the more difficult to do a job like this. I would say I know how it is, but truth is, I don't. I've never even had so much as a headache in my life. The usual bumps and bruises and colds, etc, all transitory, but nothing chronic. Unless you count the shrapnel in my knee. But that only bothers me if I bump it and I'm very careful not to do that. I admire anyone who can accomplish the things they want to do in spite of such problems. Hang in there.
I'd be happy to contribute to this project if you'd like. No doubt this has been quite a drain on your income. Buy you a Sabertooth or whatever. Just give me a Paypal name or whatever and you shall have it. Also, let me know if you need software help.
Take care of yourself and happy holidays. Skippy says happy holidays too. Wait. Skippy has a question ... What is it? No, he won't send you a fembot either. No, you can't write to him yourself. Nevermind.
@WBS.
Great to hear from you, and thank you for your kind words. Yes this guy was a labour of love so to speak, but I'm pleased with the way he's turned out. I admit that I lost a little motivation half way through, but thanks to the guys here, they gave me the push I needed to crack on.
I have to say, your offer is very gracious indeed, and thank you soooo much for that as it would be helpful. But in all honesty, I can't with good conscious accept the offer, not for a DIY robot project, so will respectfully decline. I just wouldn't feel right about it, but I am truly very grateful to you in any case. If I do need any help with software however, I'll be sure to give you a shout.
I'm really pleased that you enjoyed the video, and E4 passes his regards on to Skippy (I think we should keep these guys apart. Who knows what mischief they would get up to, lol). I would like to get E4 and K-9 working together, maybe for an Xmas video, but I have trouble getting two EZ-B's running at the same time in client mode. Anyway, thanks again WBS, and I'm pleased you like the newest member of the family.
To any Sabertooth users, in regards to the Sabertooth controller, I have a question which I just need to be sure of.
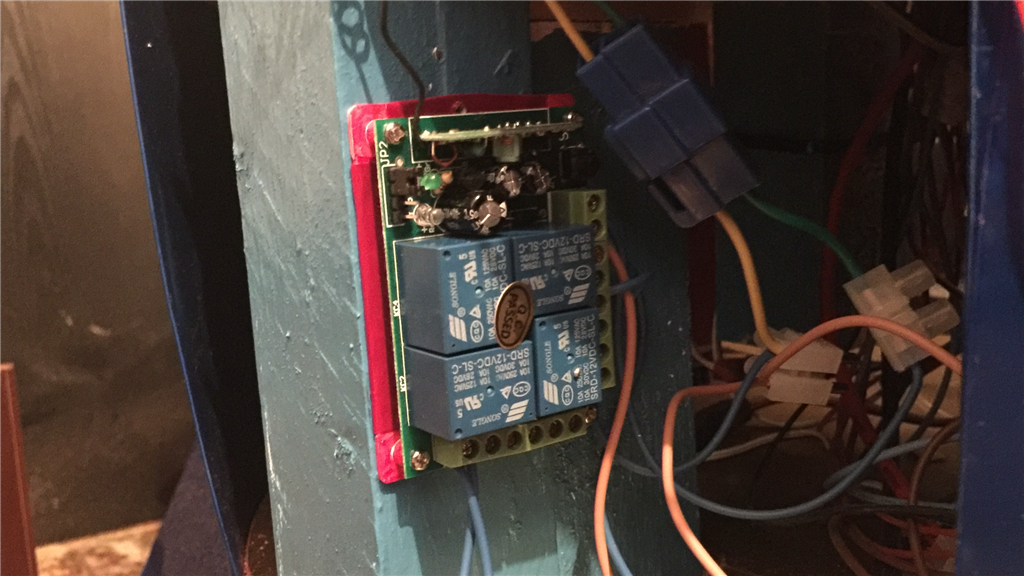
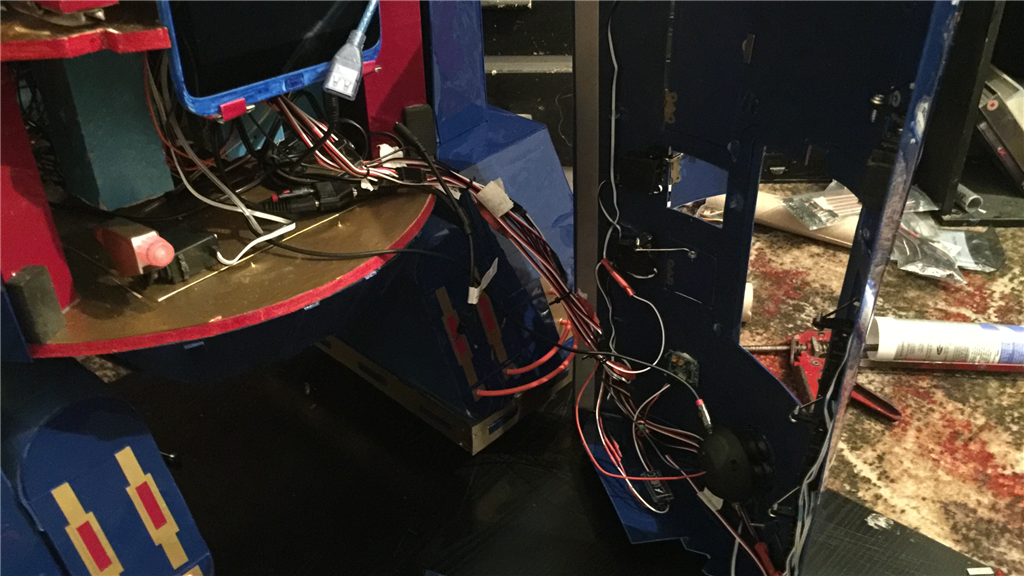
Currently, the motor controller I'm using works well, but it has one flaw which is that when I power the robot on, the motor controller springs in to life and starts turning the motors at full pelt until an EZ-B connection is made, and a "motors stop"'init script is run. So because of this, both the EZ-B and motor controller are wired to a 2 channel remote relay control. I power up and connect the EZ-B first, and when the connection is made and Init script run, I power on the motor controller. But as I mentioned, I've run in to a problem (I figured out that it's the Remote relay that's giving me the issues). Even when I make sure the motor controller is switched off before I shut down the other systems, it can be 50/50 whether the motors turn at full pelt again when I power on the EZ-B. I think the relay is tripping which is causing the motors to turn when they shouldn't. E4-B4 has already slammed in to a wall because of this, but luckily he didn't suffer any damage, (although he did take a chunk out of the skirting board).
So the question is, does a Sabertooth controller work the same way and need a separate power On/Off switch where as when power is turned on, the motors would turn so it would need to be switched on after the EZ-B is powered on and "STOP" an Init script run, or does it work like the L298 where you can power the controller on before the EZ-Bs connection is made, and the motors will already be in a "STOPPED" state? I think I know the answer from what I've read elsewhere, but I'd like to be sure.
Thanks.
very nice
Hi Steve,
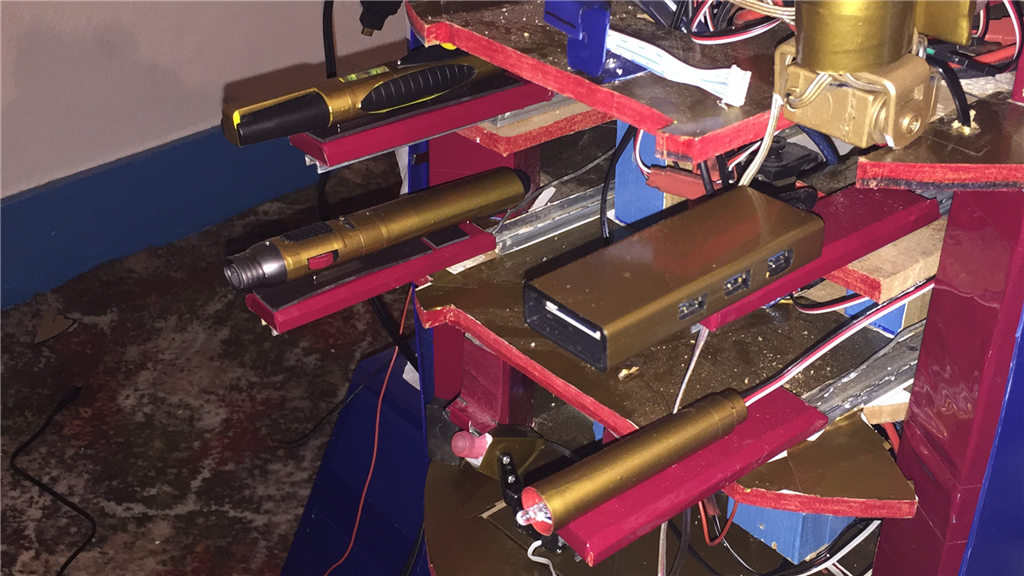
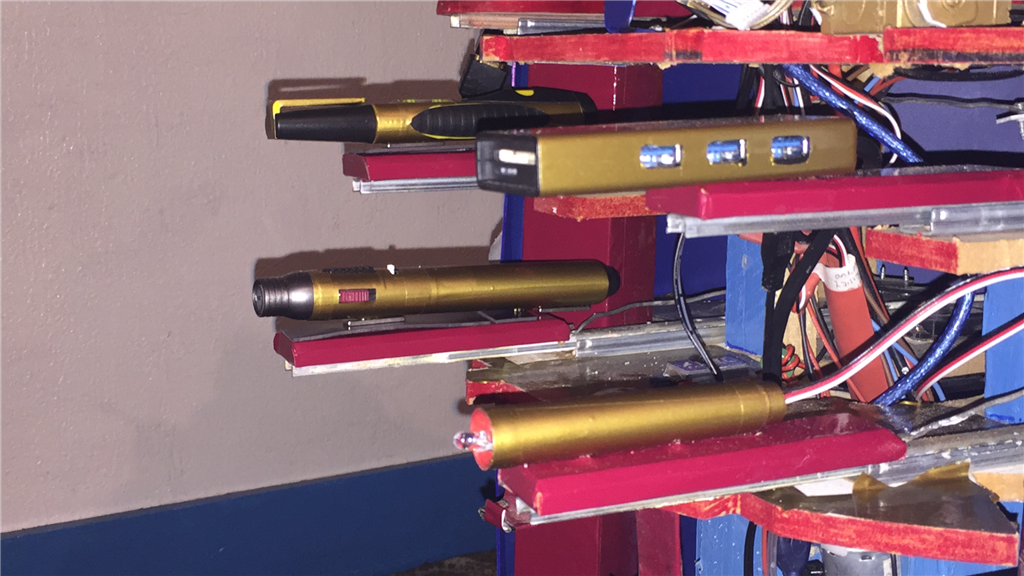
LOL ,, I am impressed with the Very Functional and Important Accessories which were shown on the first operational video. LOL,,,, LOL
All I can say is, it was really great to watch the progression of the build of this fine project, and thanks for the sharing of it by you with all of us.
I look forward to your programming updates. Thanks and we look forward to more on E4-B4 and K9.
Ron R
Cheers guys. Yeah, you can see that when building E4, I had two of my favourite subject matters going hand in hand with the design... science fiction, and beer, (hey, it works for soft drinks too kids,lol).
On your Sabertooth question, I have never had an issue with having to turn on or off the Sabertooth before or after the EZ-B. The Sabertooth operates off of a serial connection. If that serial connection isn't present, I suspect that the Sabertooth stops. I do things a bit differently by using an arduino to drive the Sabertooth (completely unnecessary for your robot) so I couldn't tell you if the V4 would send some garbage to the Sabertooth that could trigger an action but I seriously doubt it. I haven't seen anything that would indicate that this would be an issue.
Because the Sabertooth uses serial, both devices would have to be powered up (in either order) and then the serial connection established. I can tell you that if I push the button to restart the arduino that I am using, the Sabertooth stops the motors and I haven't programmed anything specifically to do this.
There are different modes on the sabortooth. I use simple serial mode for the most part. It is very easy to use. I don't know if other modes could cause an issue or not.
@David.
Okay, that makes sense and is good to know. Thanks. I know Dave S has experience with this, and I believe he has his Sanertooths hooked up directly to an EZ-B, so hopefully he will chime in as well.
Thanks again.
Okay, problem found, and resolved.
It was indeed a faulty relay on the remote receiver. Both channel relays are supposed to be N/O (normally open), but after removing the receiver and testing it with an LED, the one the motor controller was connected to was a N/C (normally closed) relay, so a manufacturing fault there.
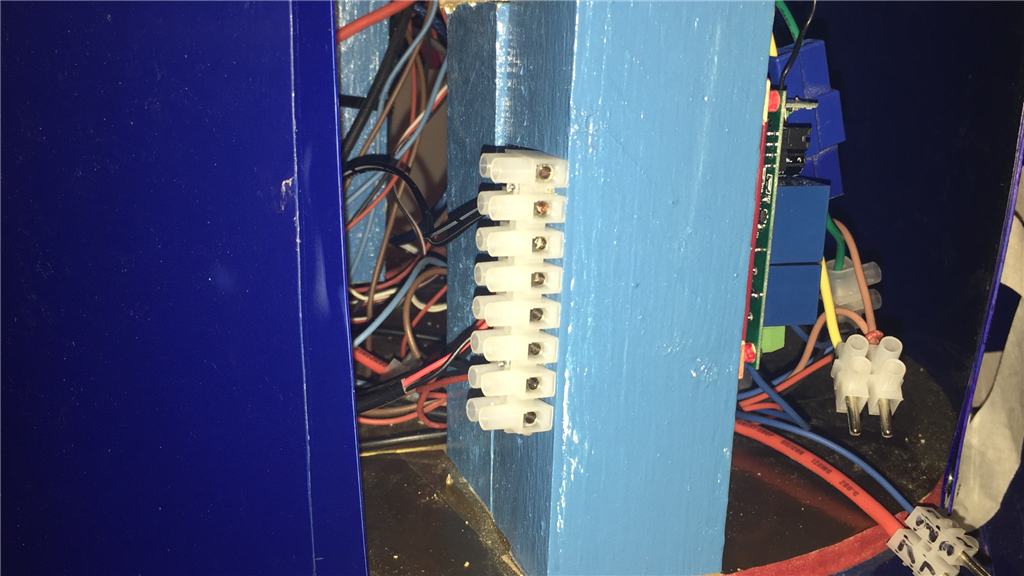
Luckily I have a 4 channel receiver which I was going to use for something else, so hooked it up, and it works great. I still think I will go the Sabertooth route, but at least there's no rush for it now so I'll get one after Xmas (Just need to get some filler to repair that skirting board, lol).