


















































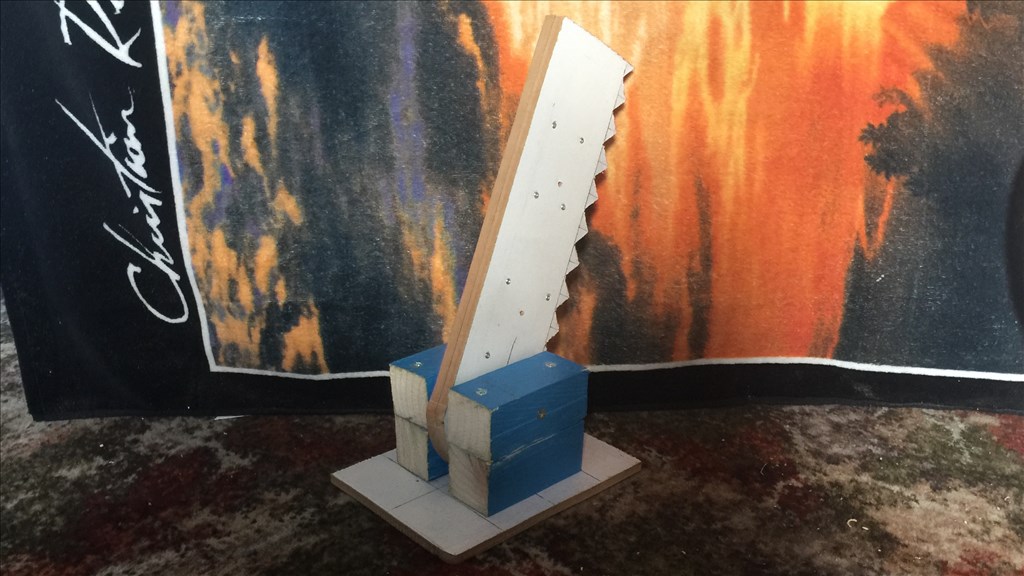











































Day 1 (4th August 2015)
So after throwing around a few ideas for a new project to sink my teeth in to, I decided to go ahead and do my own version of an Astromech Droid, rather an Astromech "Smartdroid". With K-9 being one of my all time favourite on-screen robots, R2-D2 was (and still is) just as much of an all time favourite of mine so building one of my own droids is a logical step for me. As my other robot showcases where posted when the majority of the work was done, this will be a build diary of sorts, with updates throughout the build.
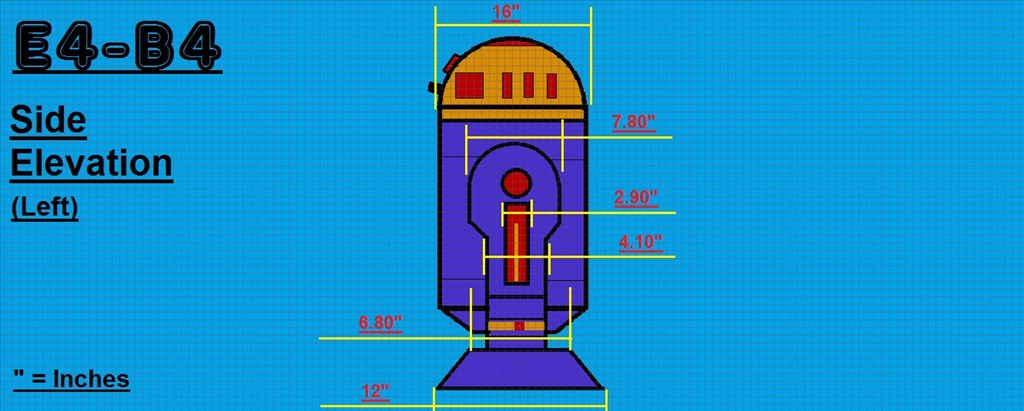
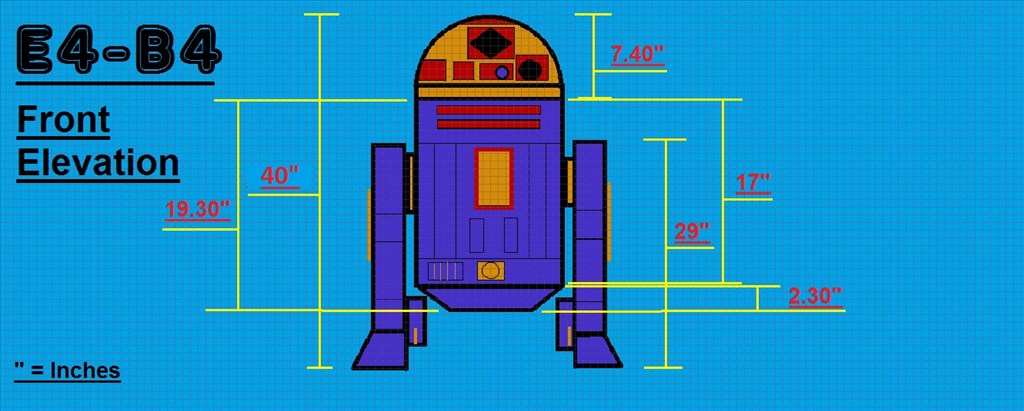
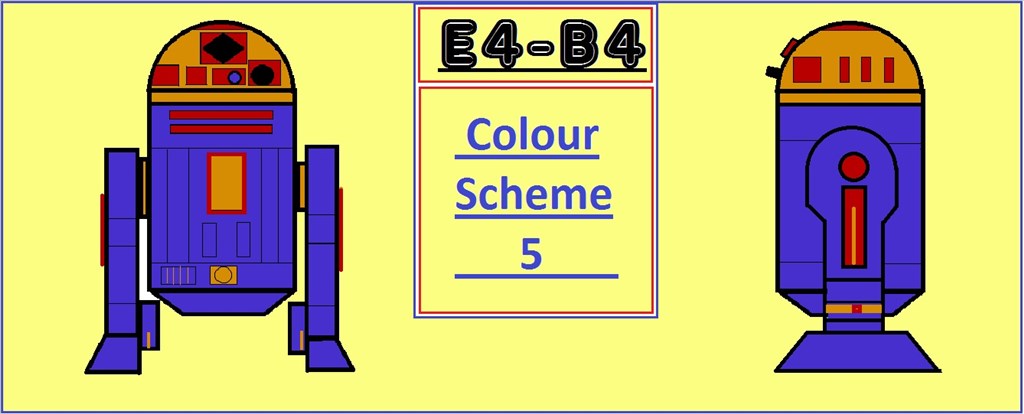
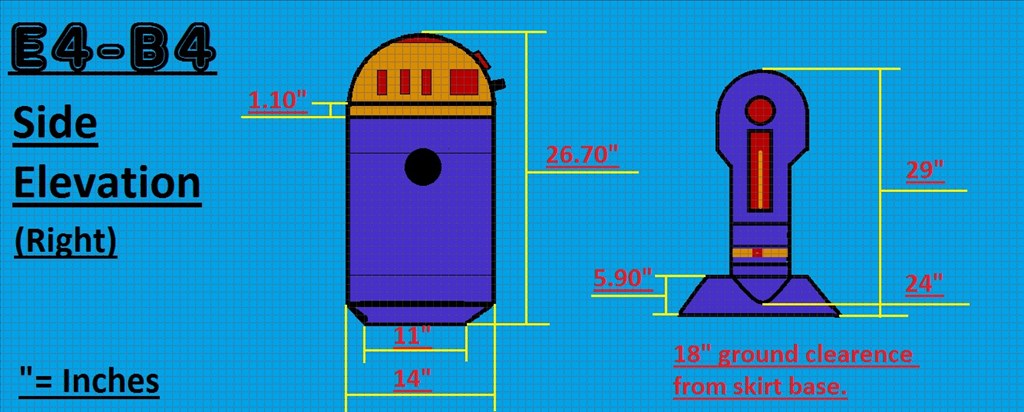
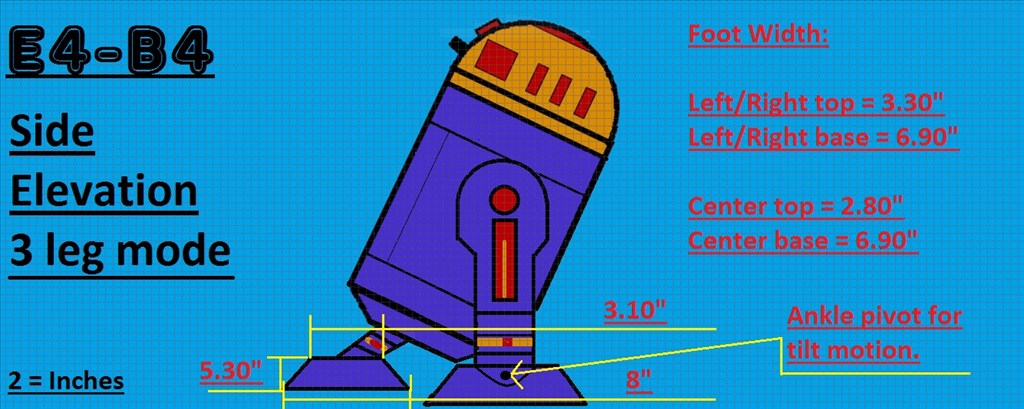
So wanting to get back to building, I had a few ideas floating around for my next BIG project and the thought about doing an R2 style robot came up a few times in the past (the blueprints I drew up that I've posted are 3 years old and was for an R/C version), and after encountering a few design issues for a large custom robot (which I will get back to one day), it was @Robot56's fantastic Astromech Droid project that was the final push for me to decide what direction I should go. There are so many great scale replica Astromech builds around that people have done, but much like my K-9 2.0 build, I want to stay away from doing an exact prop replica build and do a custom build with custom paint job (as seen in the blueprints) while still keeping with the overall original design.
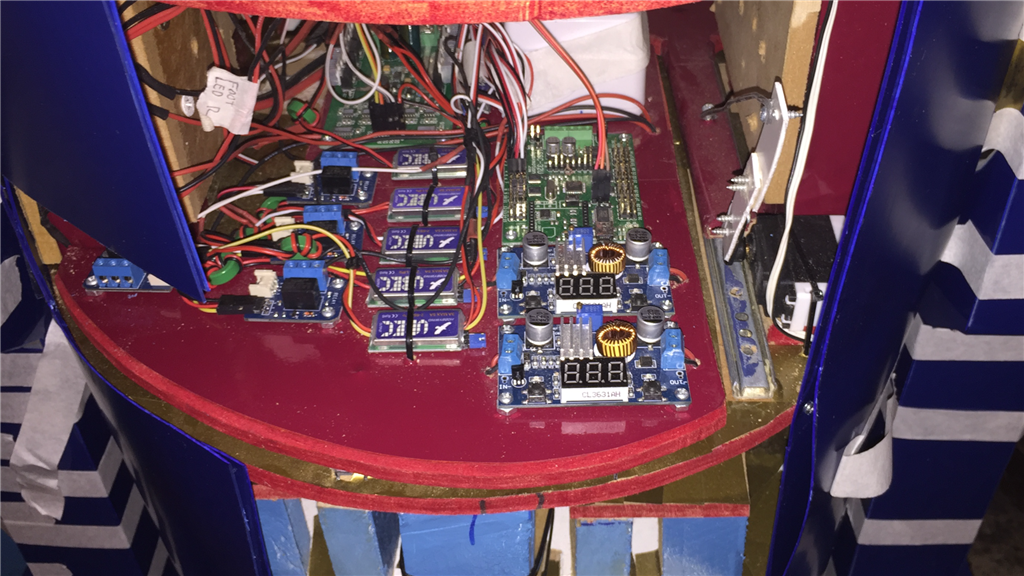
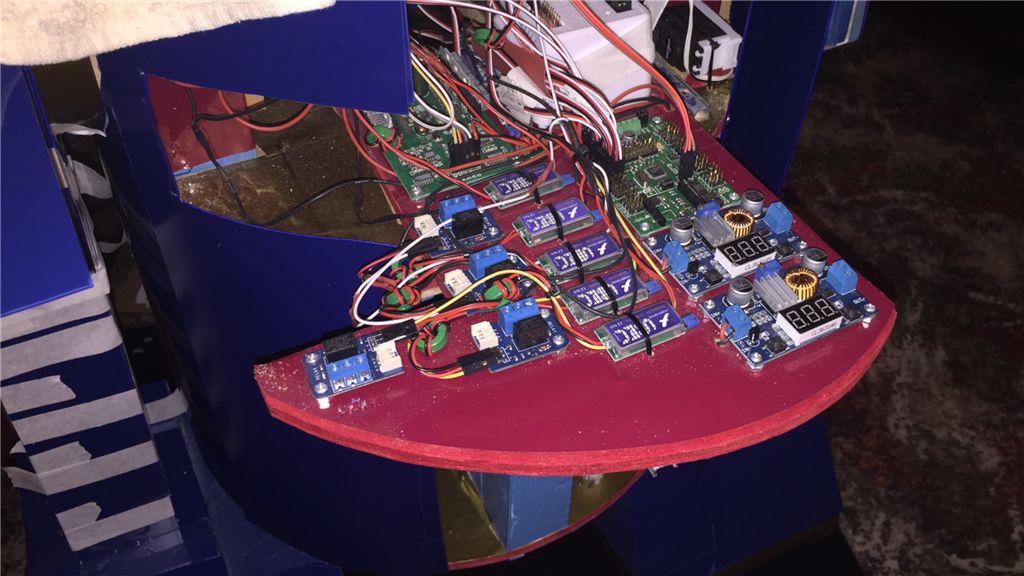
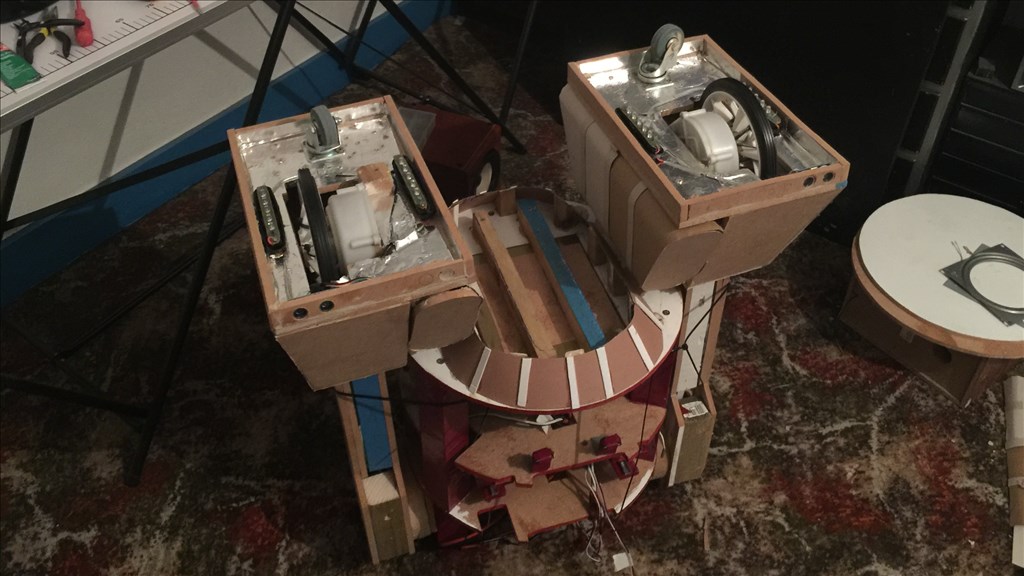
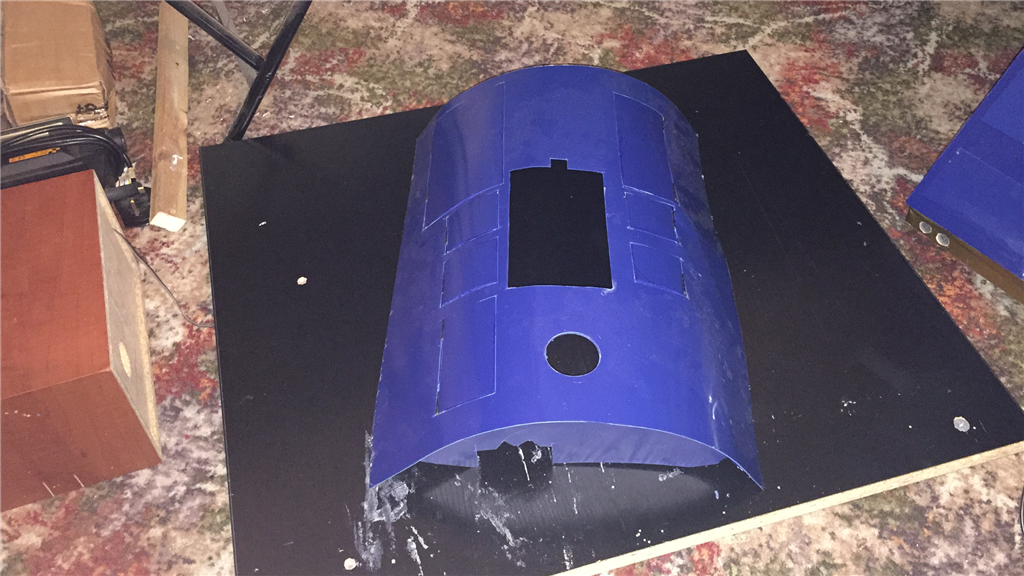
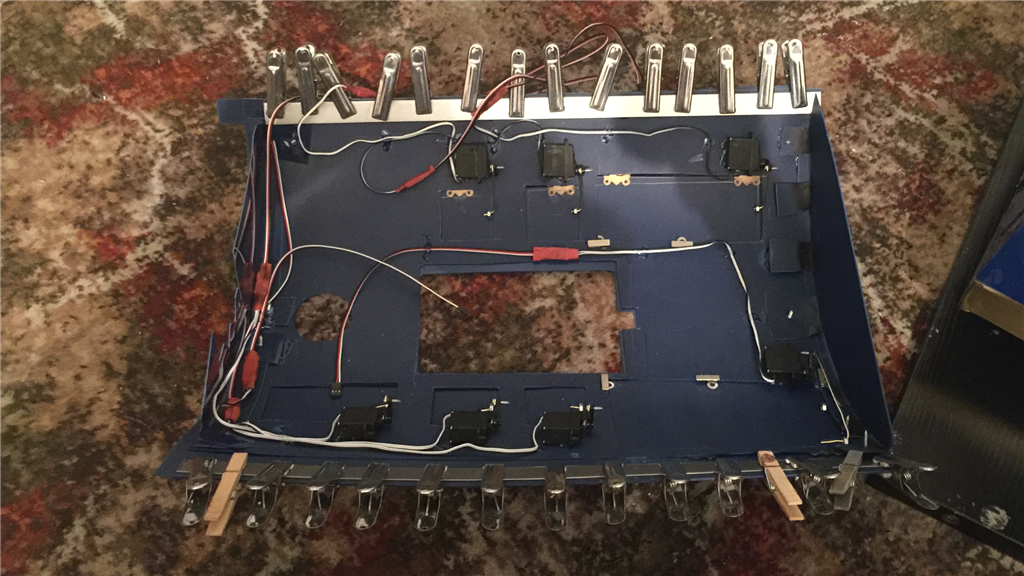
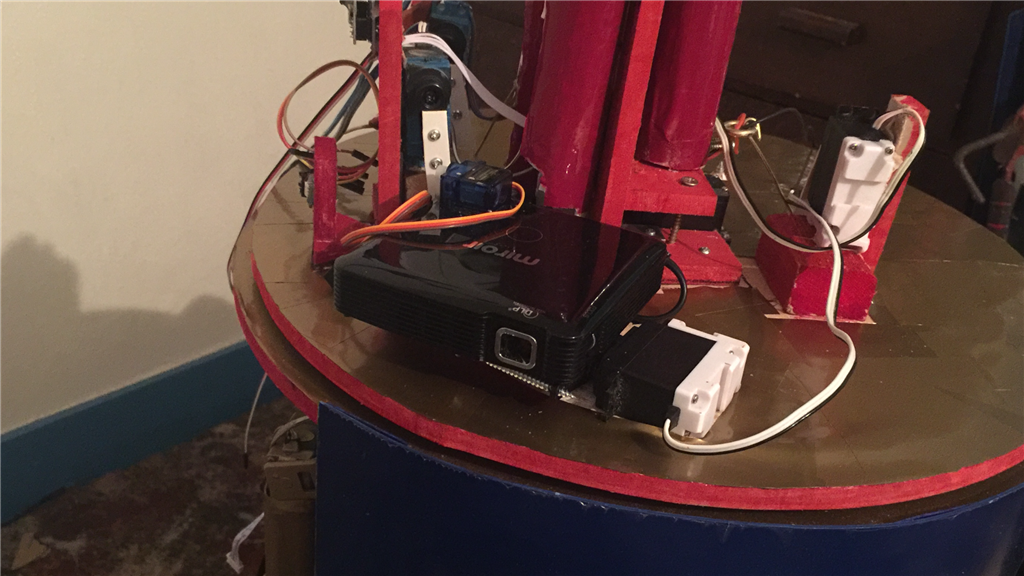
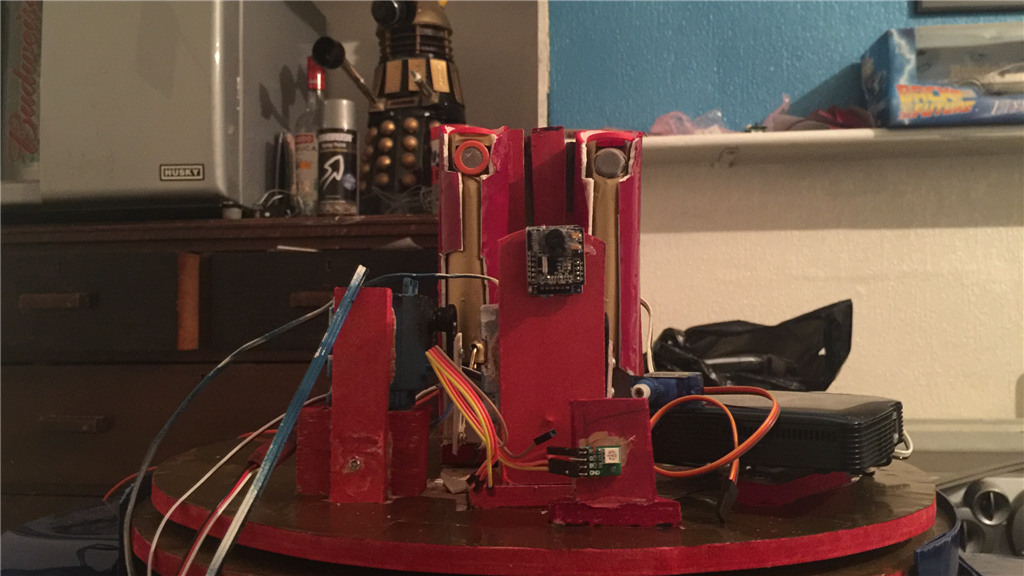
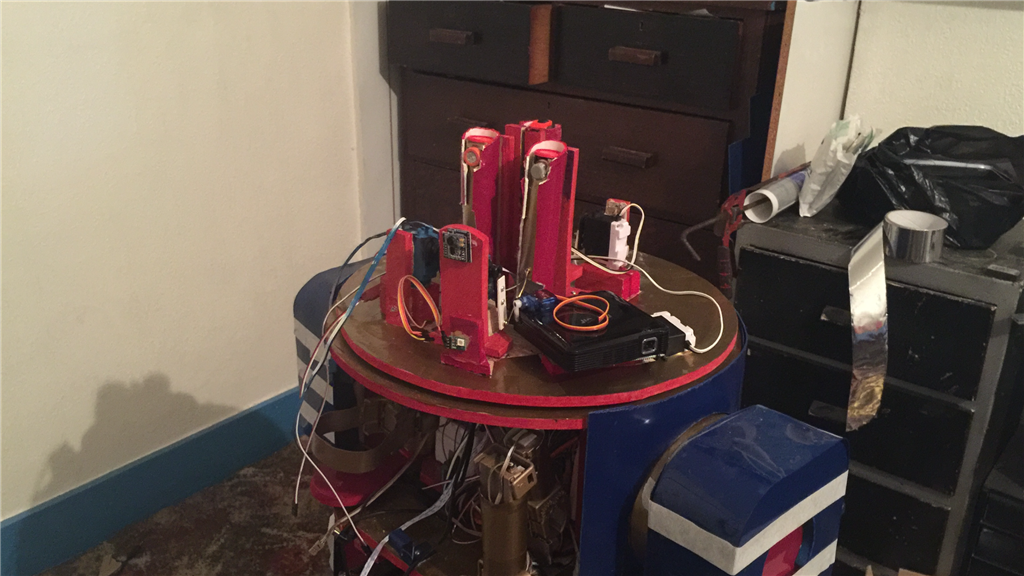
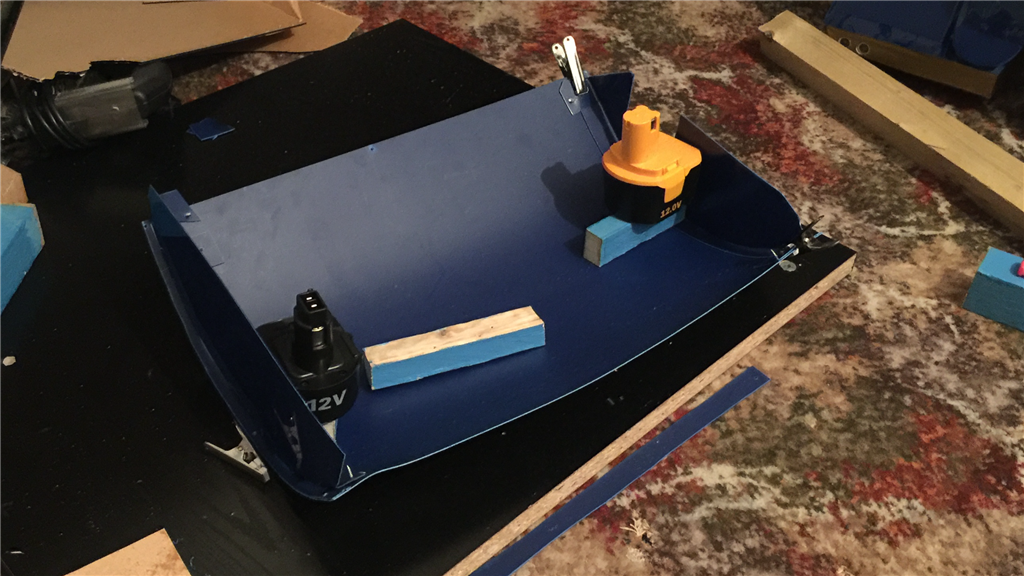
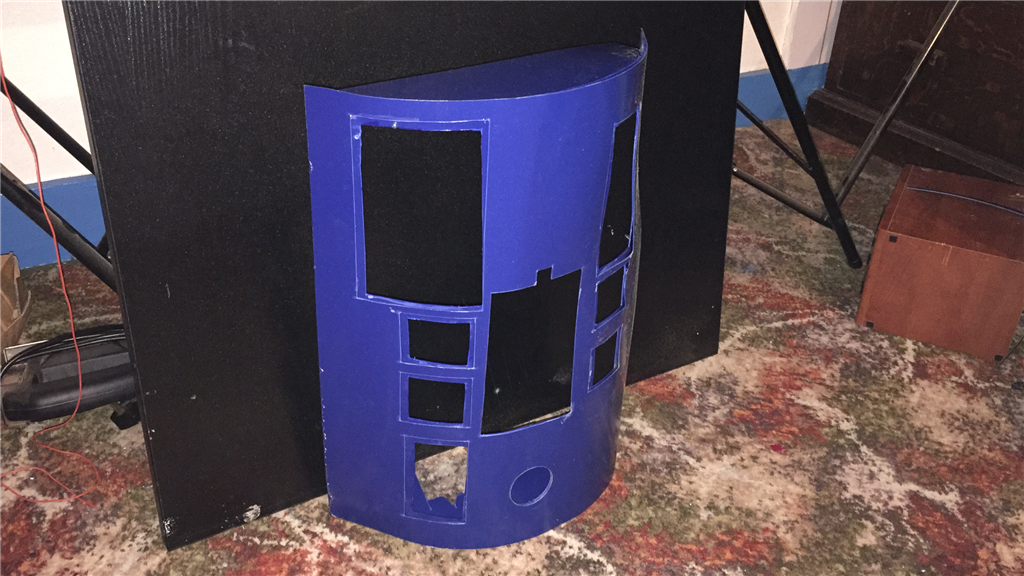
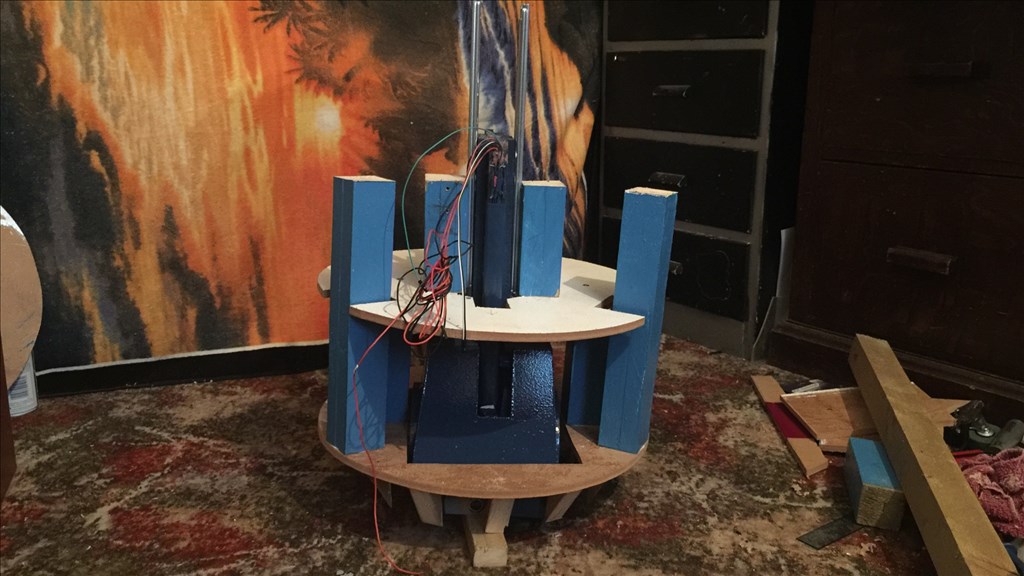
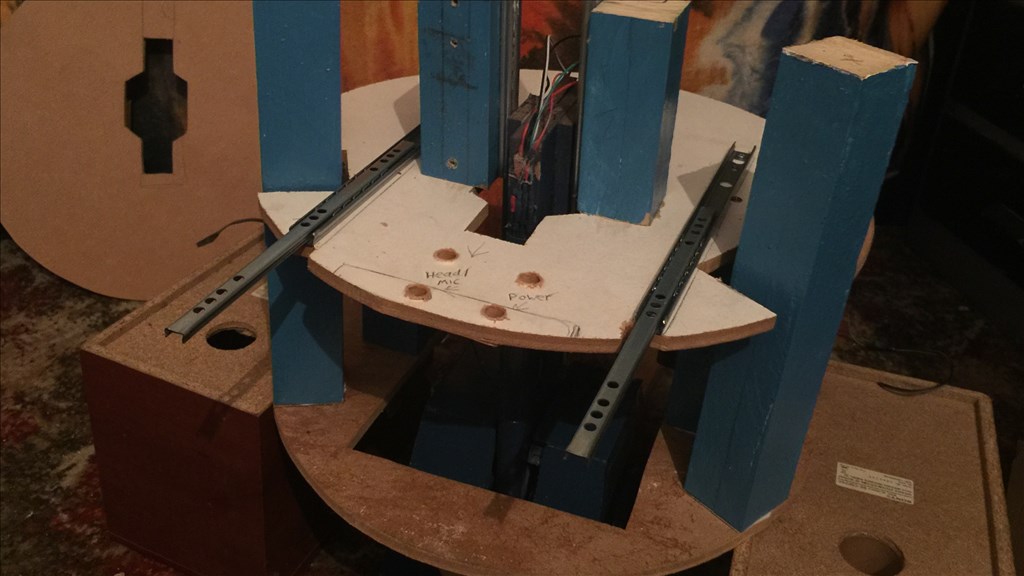
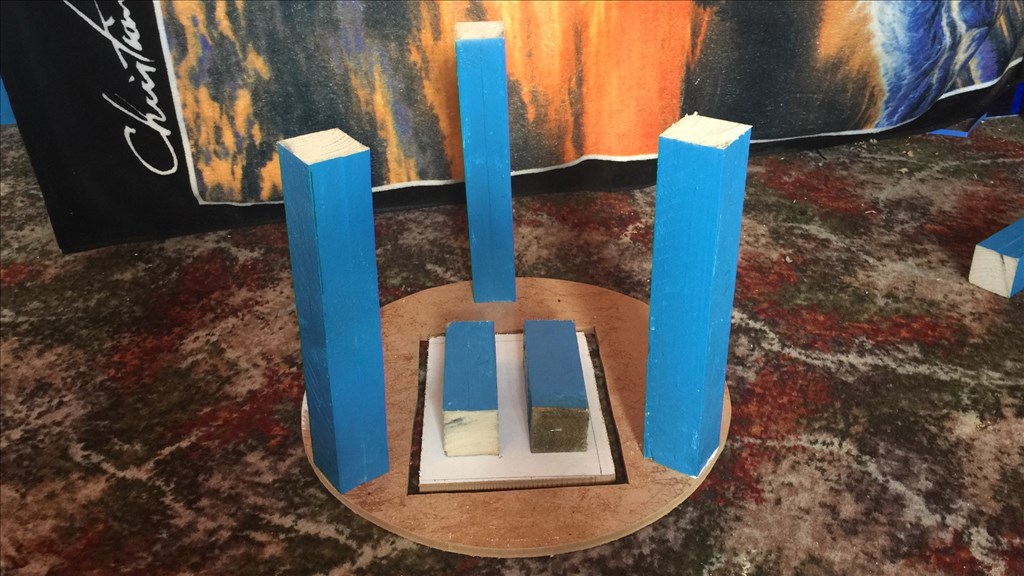
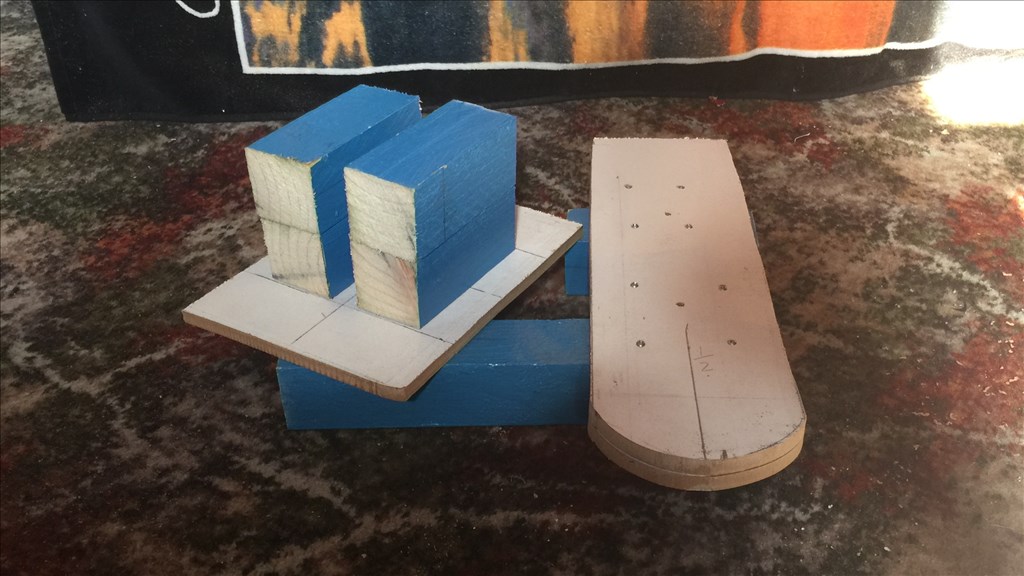
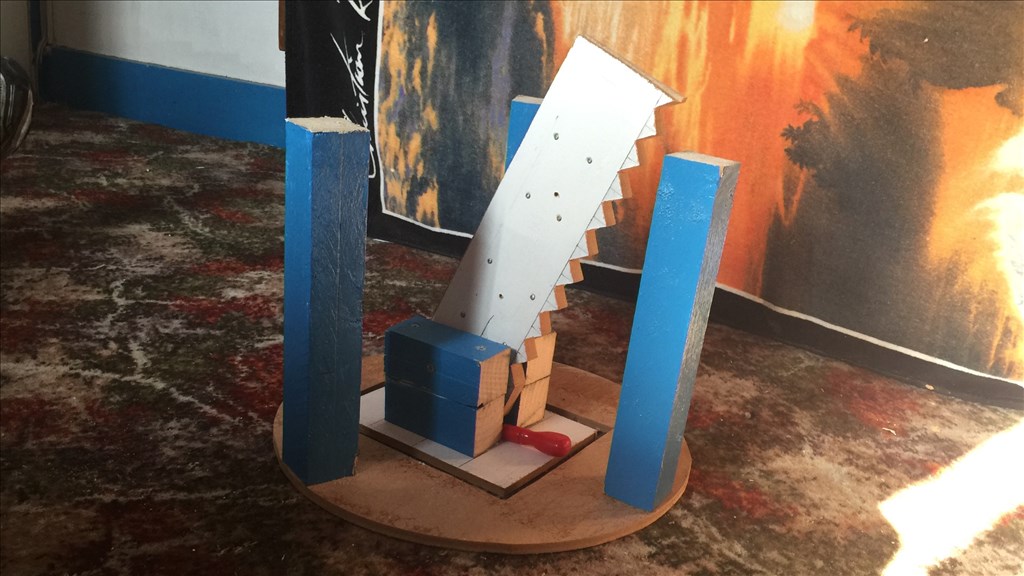
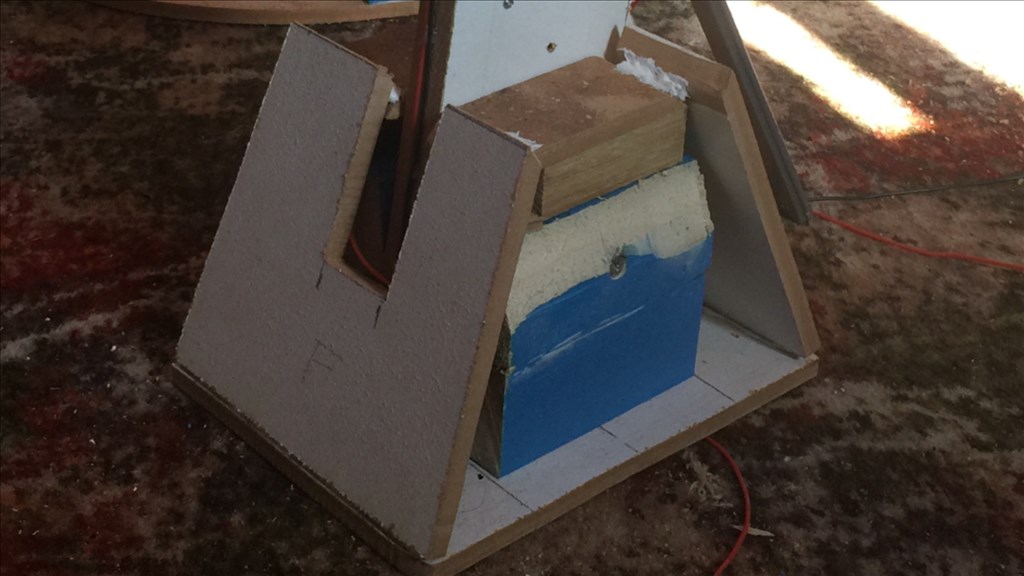
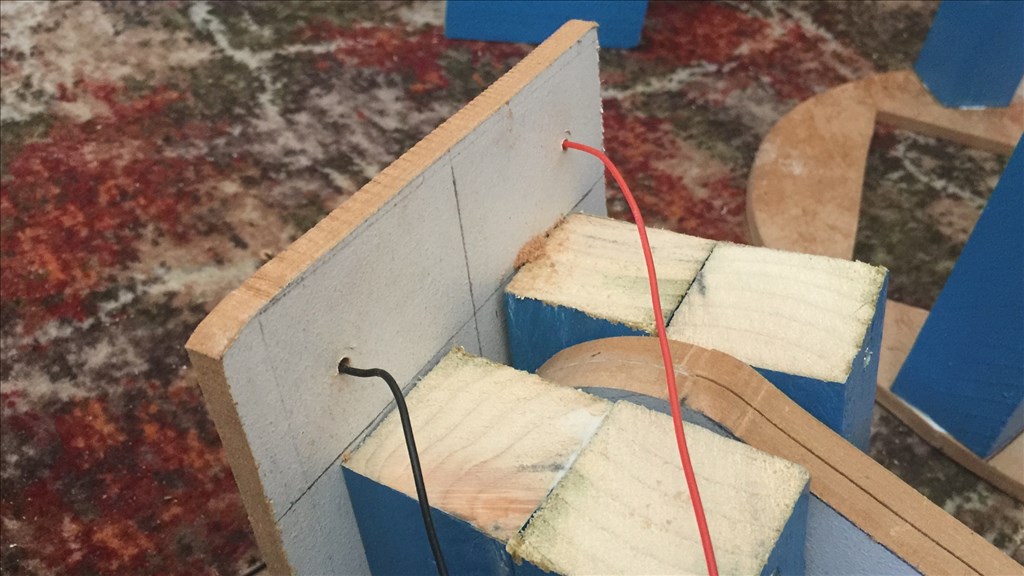
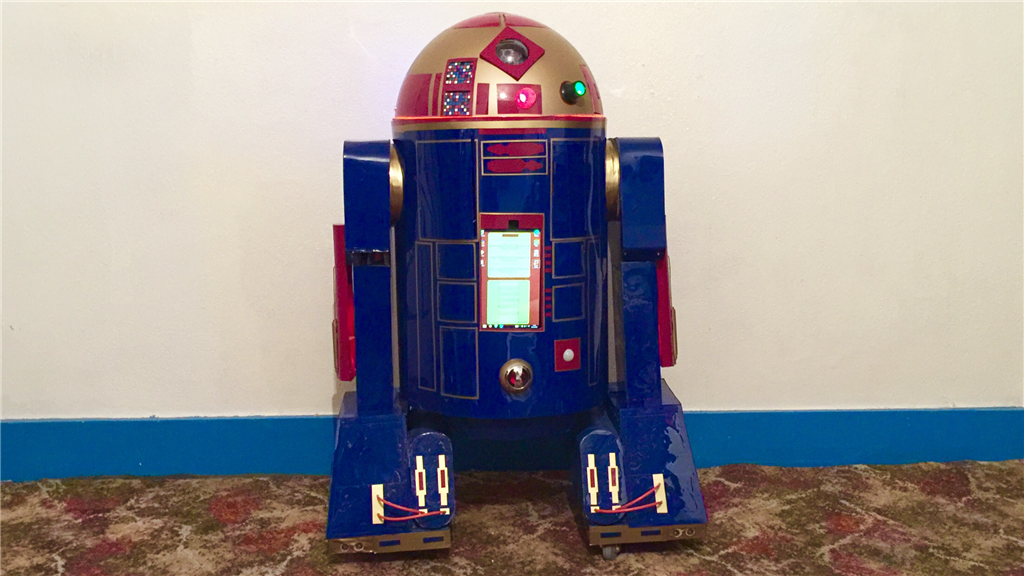
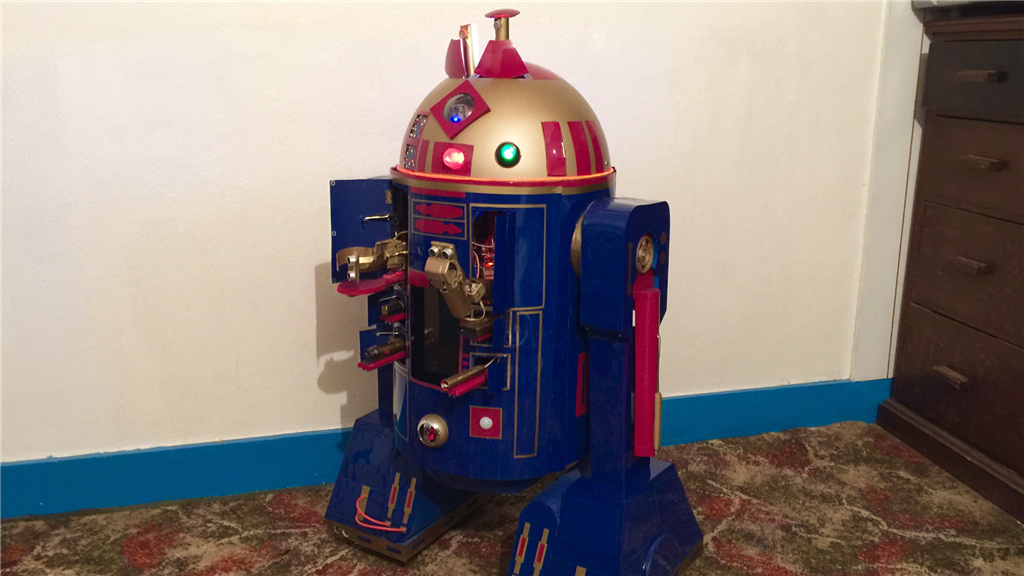
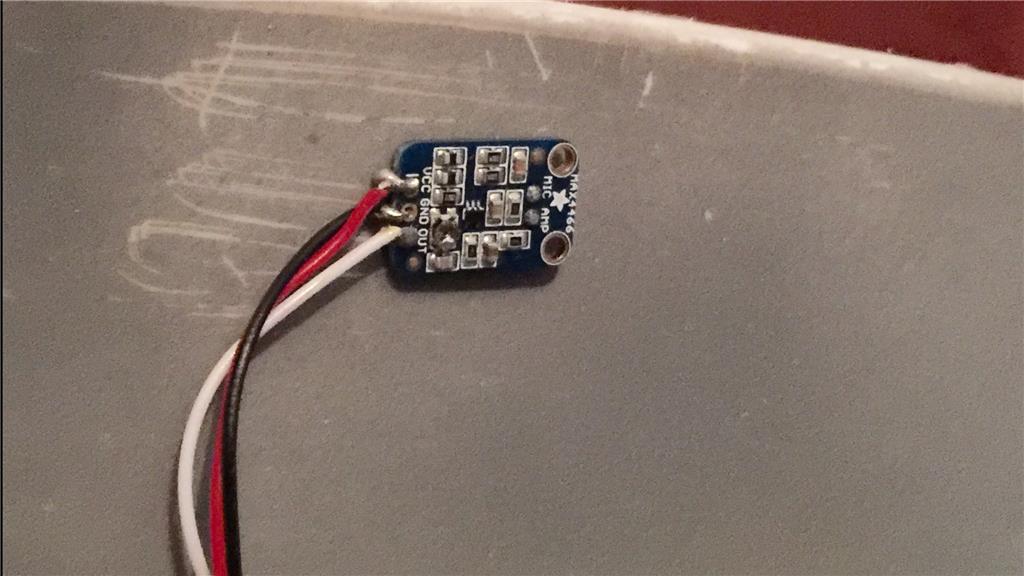
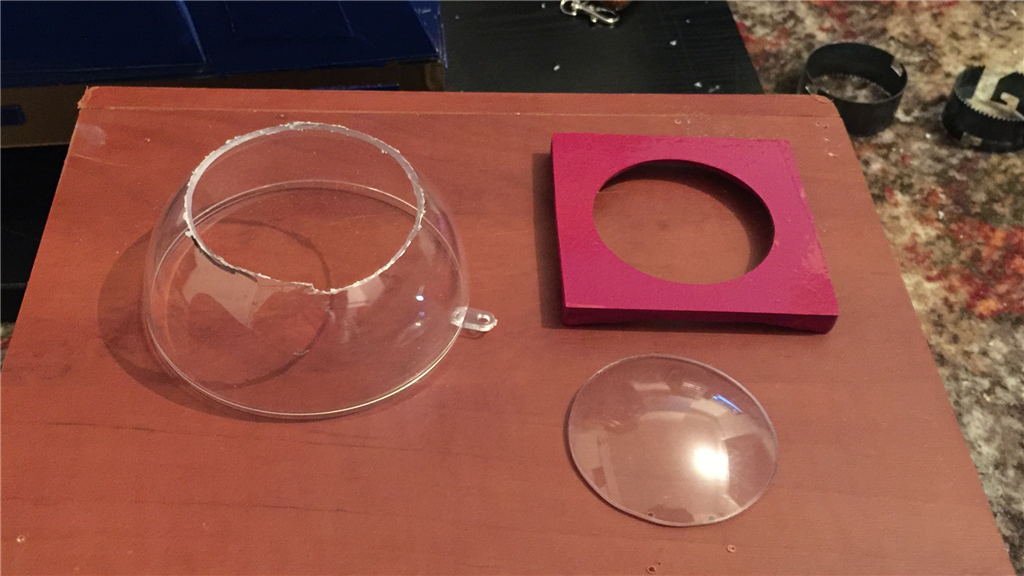
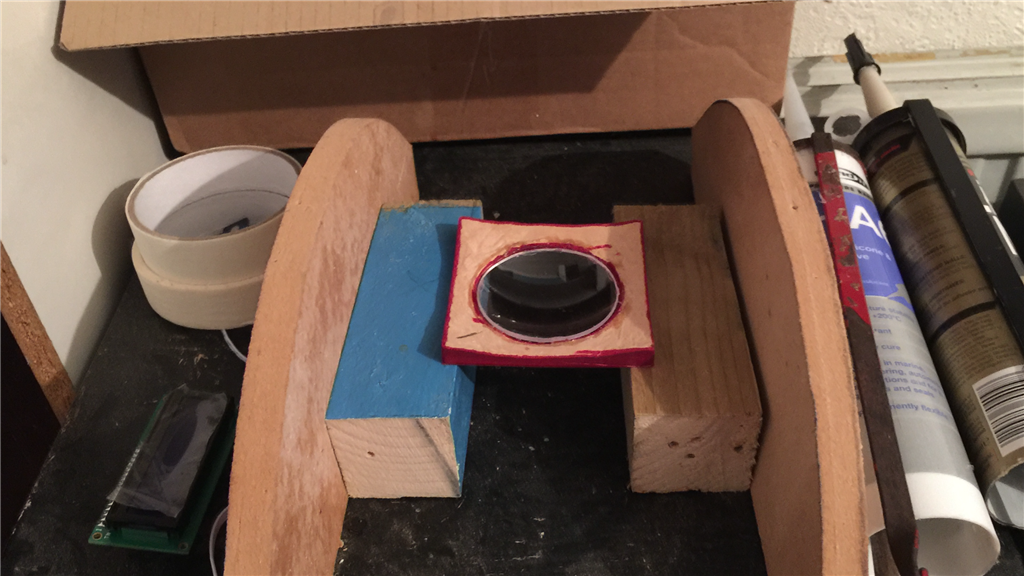
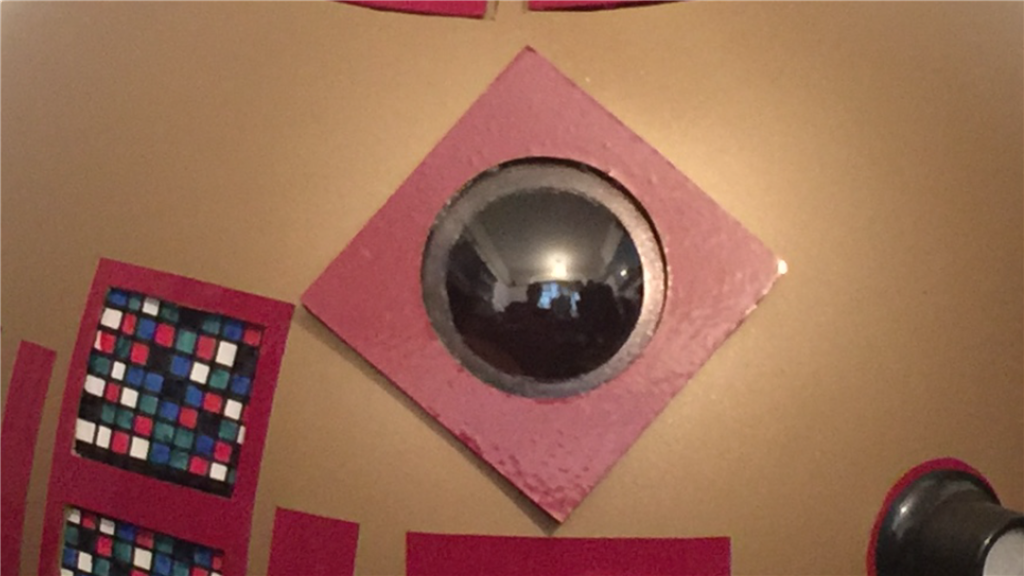
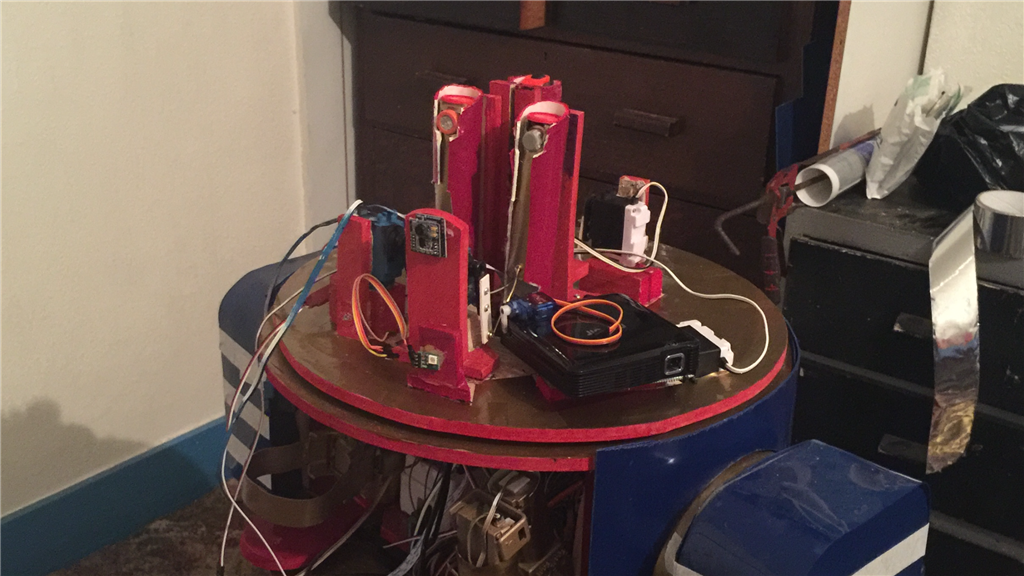
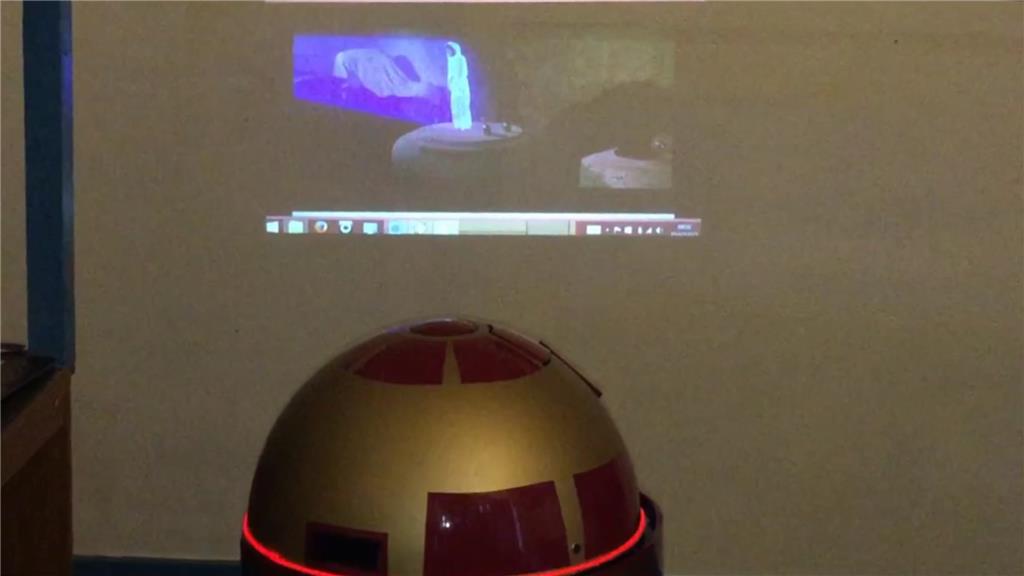
So what's with the name E4-B4 (Eiifor-Befour)? Well its kinda based on the EZ-B 4, of which this little'ish guy will have two of them. One master v4 to control motor controllers, ping sensors, v4 soundboard, camera and sensors, while the 2nd slave v4 will be used for all of the servos used as well as additional sensors. E4 will be mainly built using MDF with a plastic covering, and movement will be powered by 12v 30 watt gearbox/motors for the drive system. The "burtt acoustic signaller" and system ventilation vents on R2-D2's chest area (the two silver square'ish panels) will be replaced on E4 with a tablet PC, and the Optical Holographic Projector in R2's head will be something similar to what E4 will have, using a portable projector like the Aiptek or the Pico Genie, so no holograms... yet.
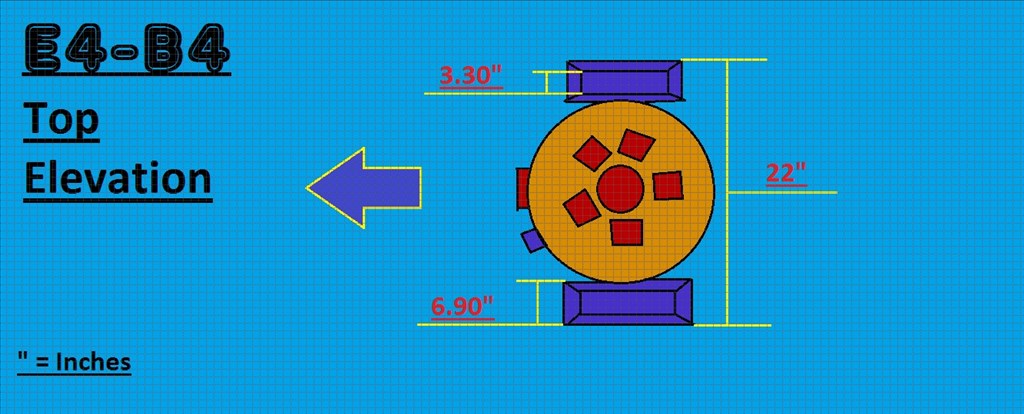
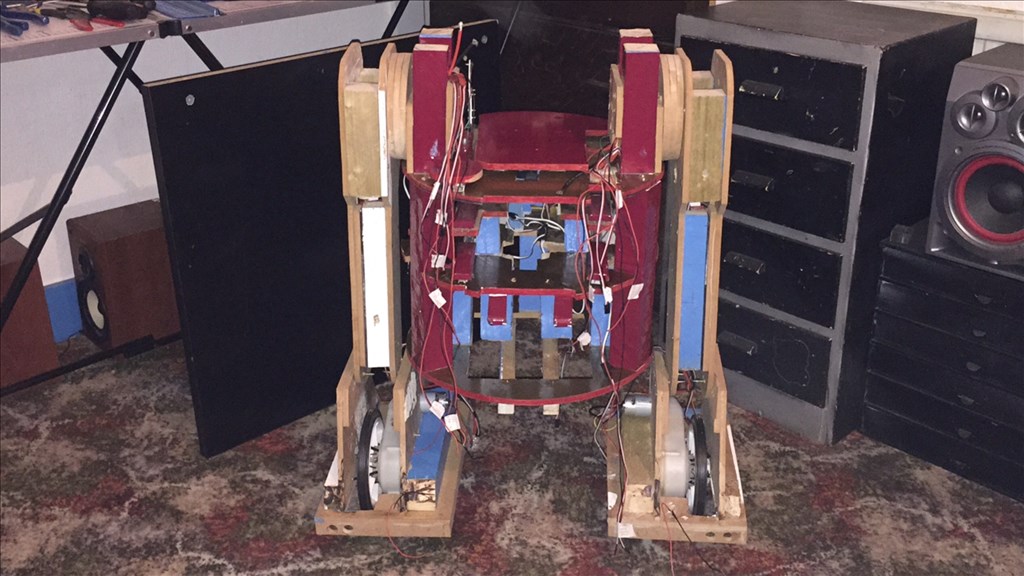
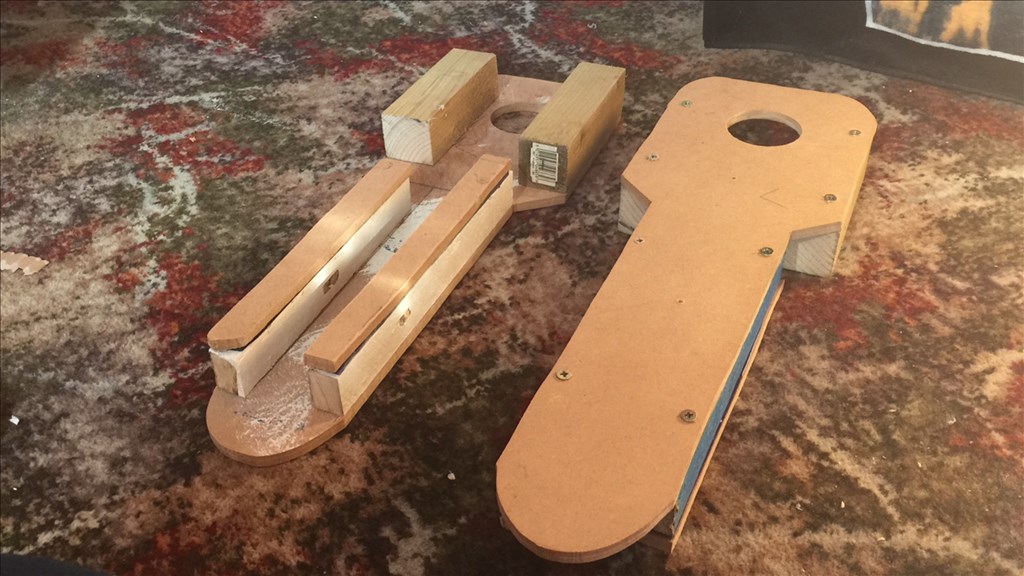
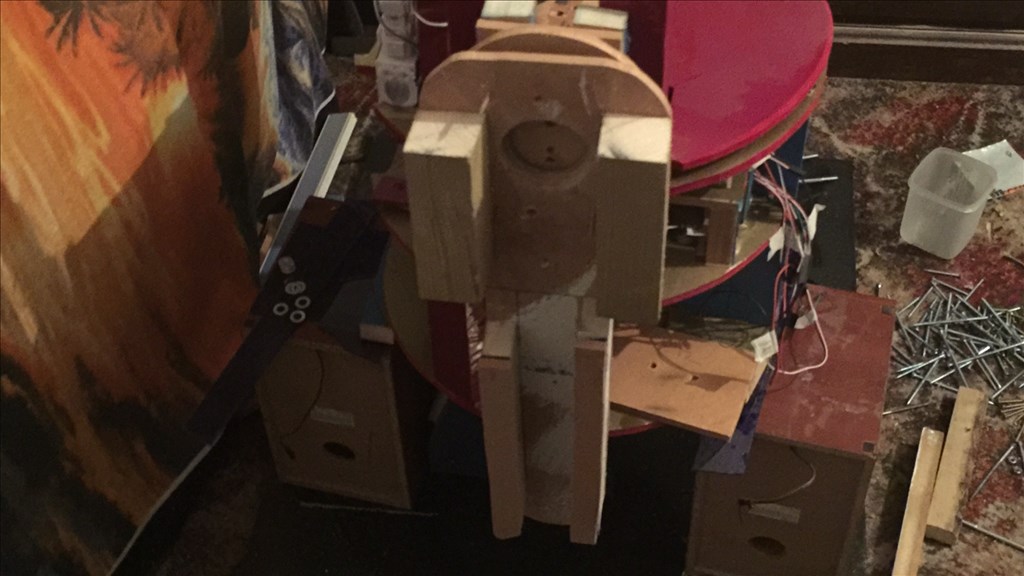
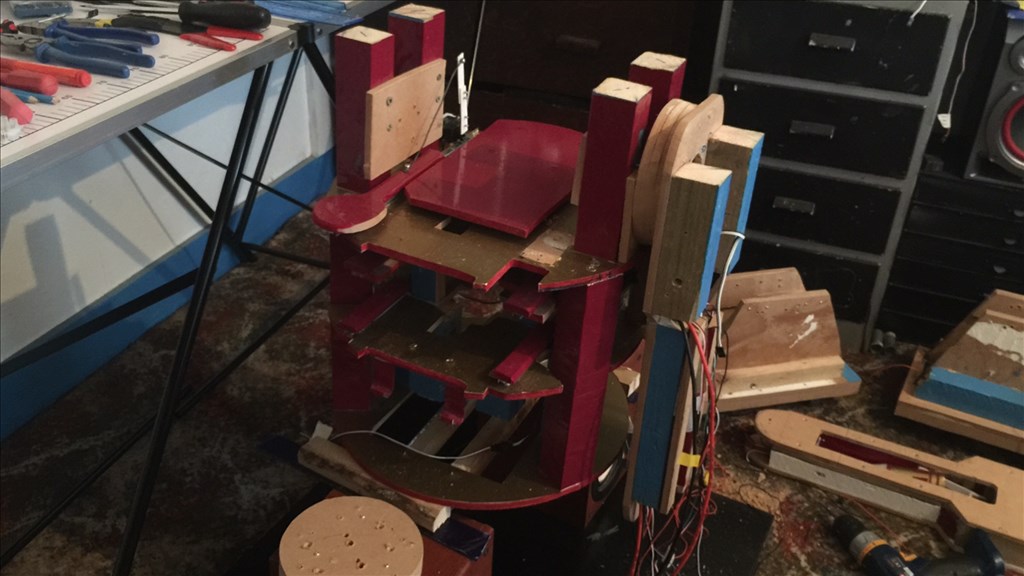
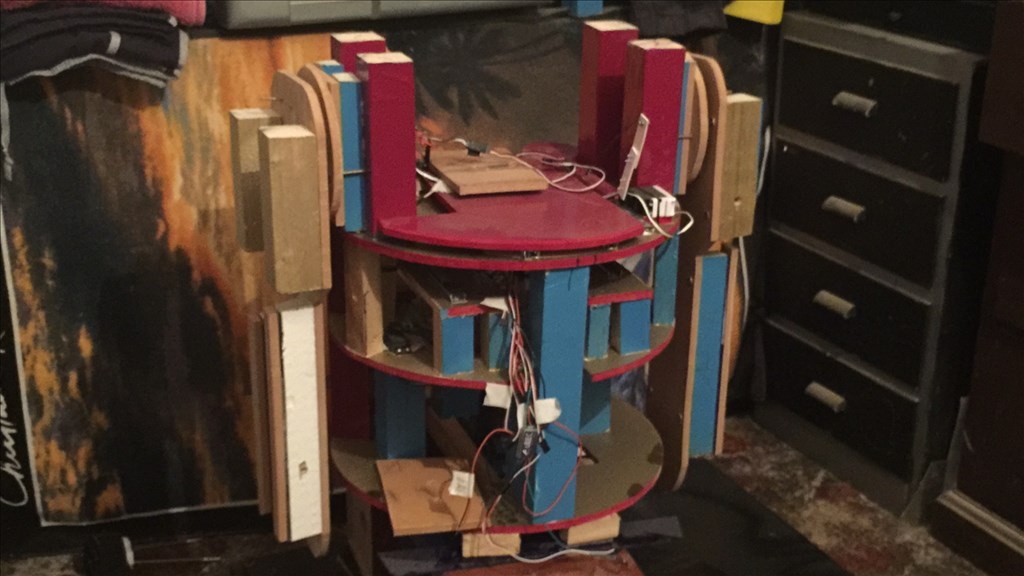
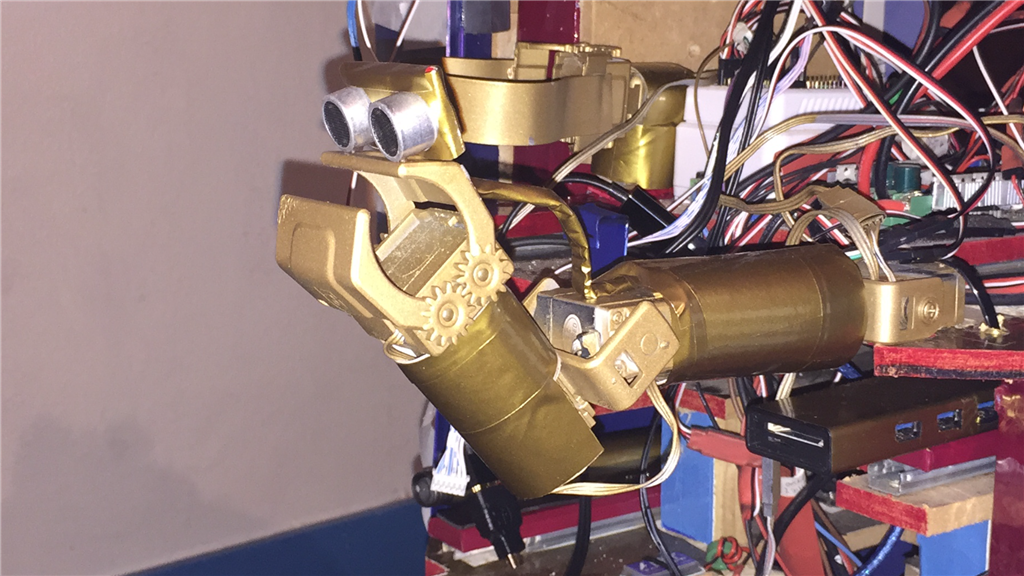
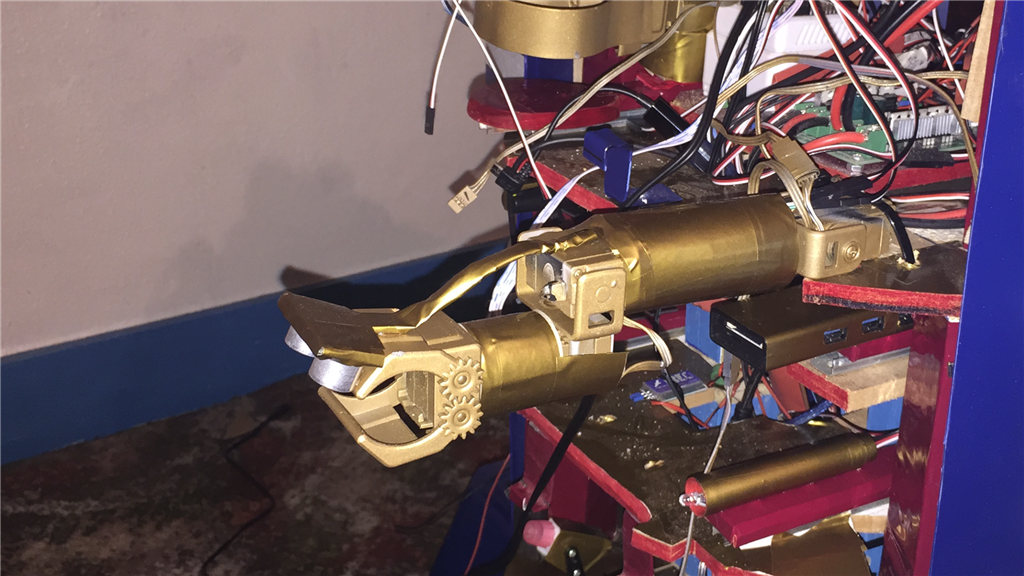
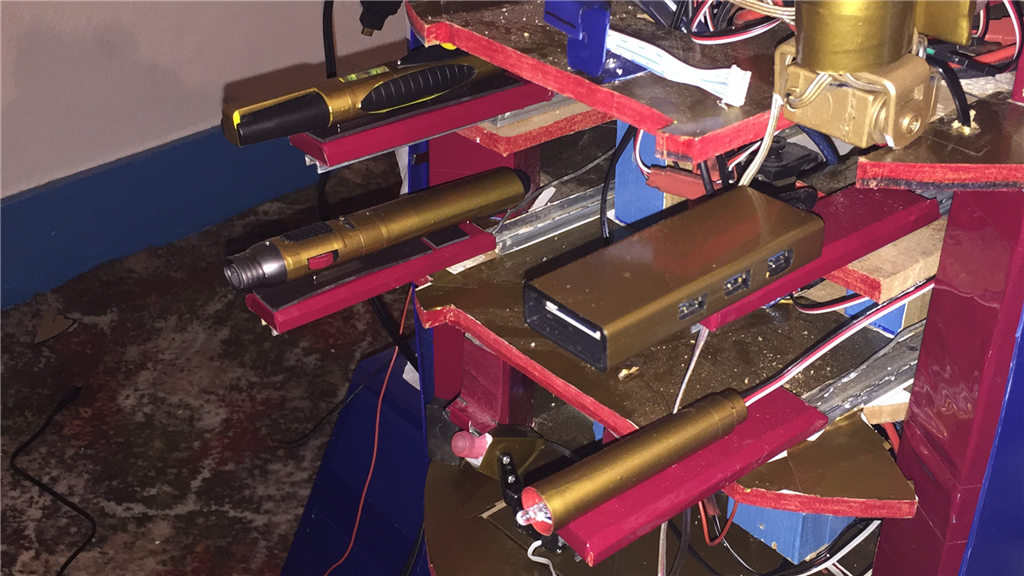
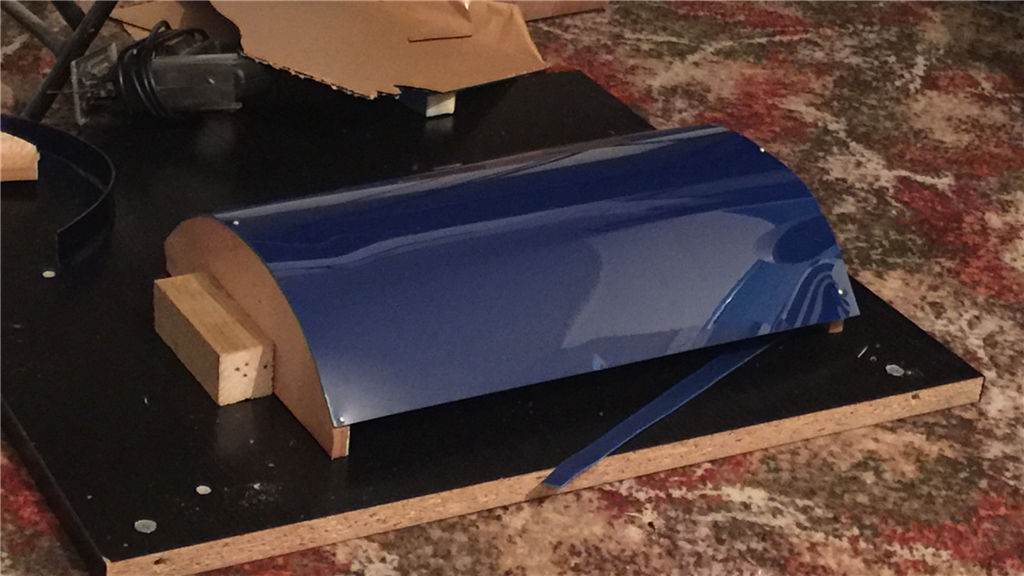
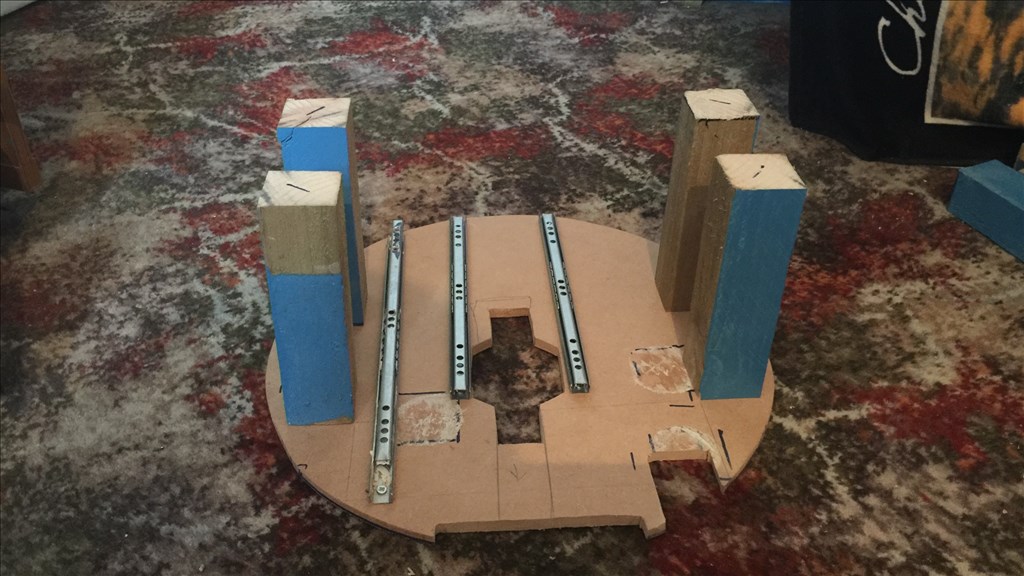
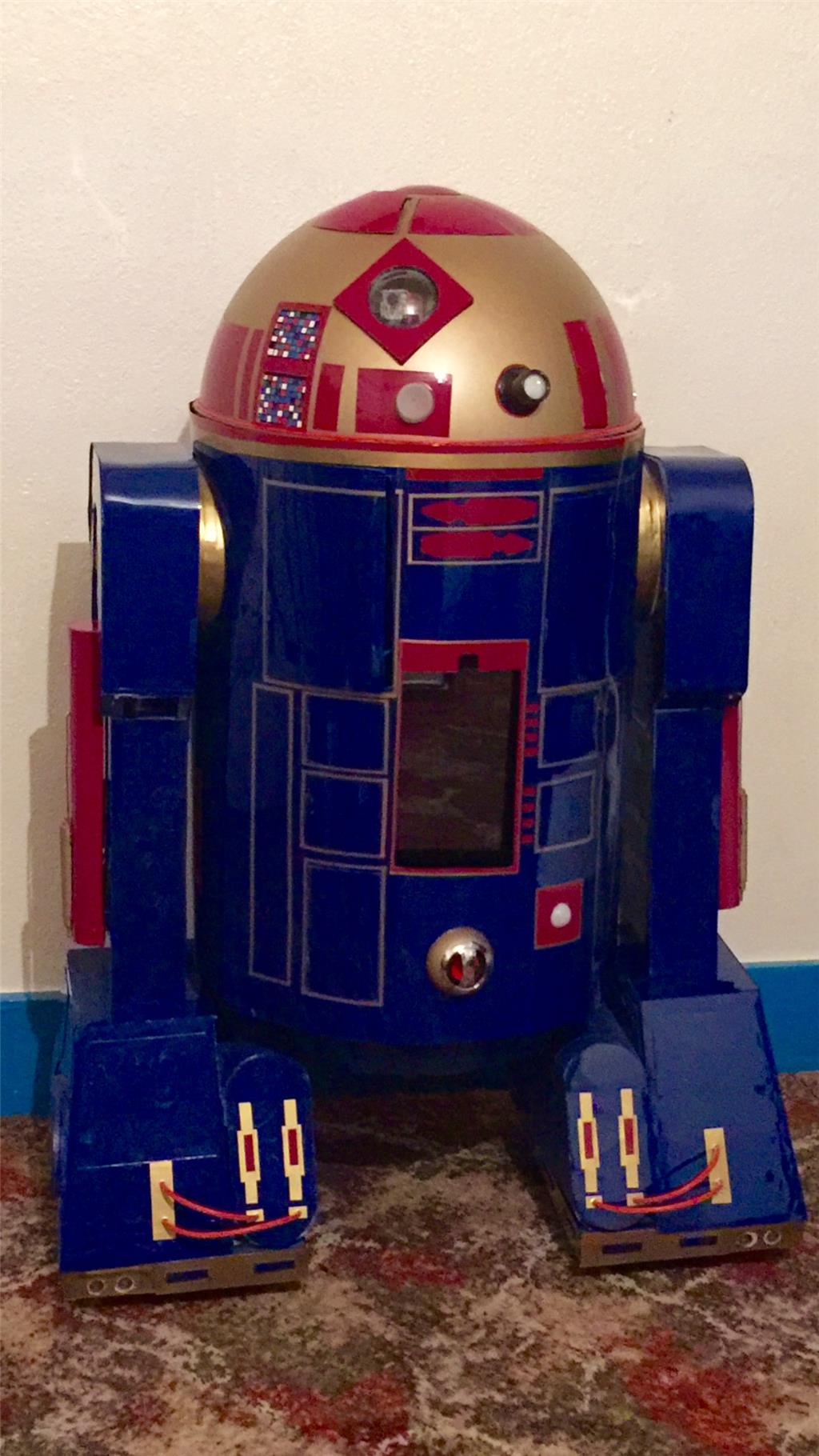
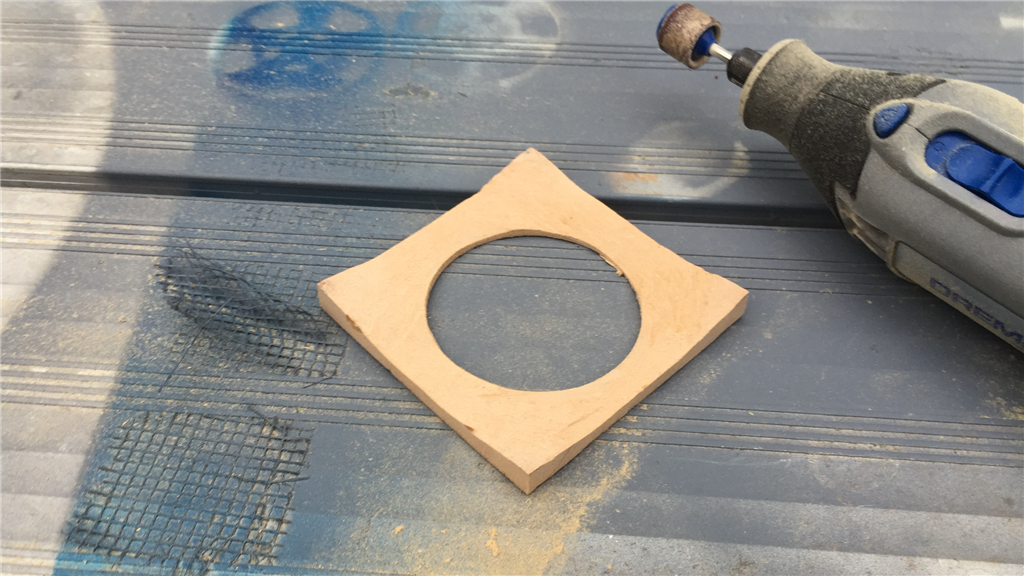
The dimensions will be slightly smaller than the original prob, but not by much so E4 will be plenty big enough. I'm intending to fit a few useful tools that he will be able to deploy, and of course have the fully rotating head which will have all kinds of bells and whistles. I have some of the MDF sheets and 2x4 wood lengths for the frame already, and the motors and head dome (lampshade) should be with me sometime this week, so it will be power tools at the ready. I'm in no rush to finish this project, but I am aiming to have E4-B4 pretty much finished by this December.
I will posting lots of photos and few videos throughout the build process, so I hope anyone reading will find this build dairy interesting and enjoyable. And as always, I'd love to hear your thoughts and suggestions (especially on the colour scheme). Anyway thanks for reading, and let the build begin...
Steve.
Discover more robots
Wayno's Cartoon Robot Into A Real Robot

Ezang's The Borg - Resistance Is Futile, You Will Be...


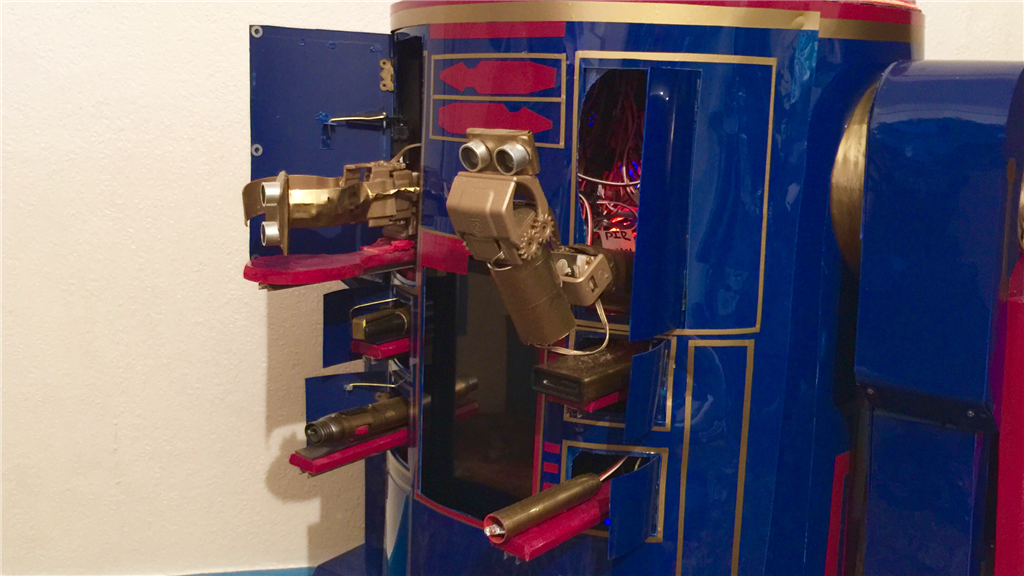
In a previous update, you may have noticed hinges on E4-B4's outer leg panels. Here's a little video demonstrating one of E4's "just for show" features, and shows what those hinges are for. Nothing special, just for a bit of fun...
this is a serious r2d2,very cool
Ha ha, glad you liked it Patrick.
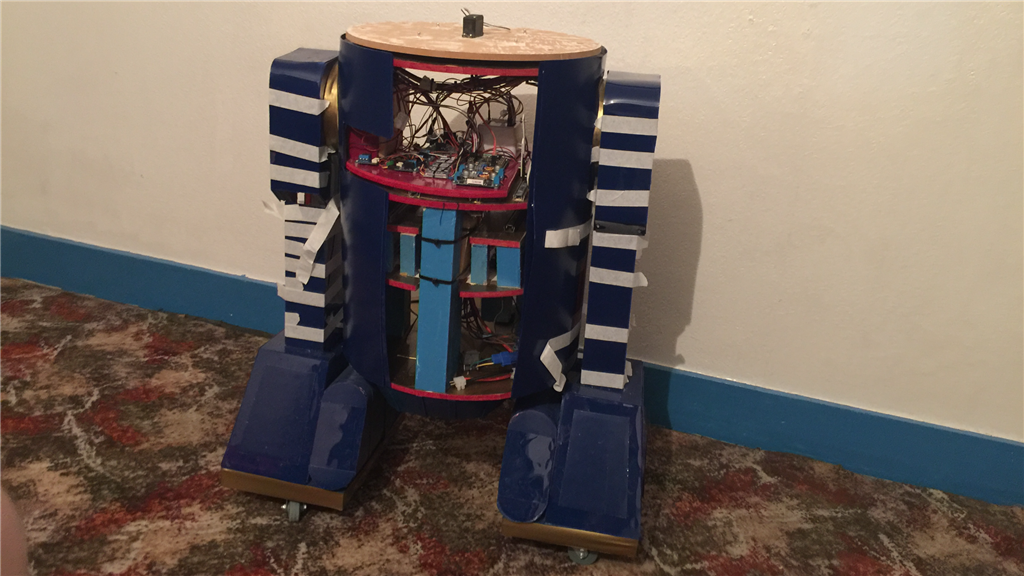
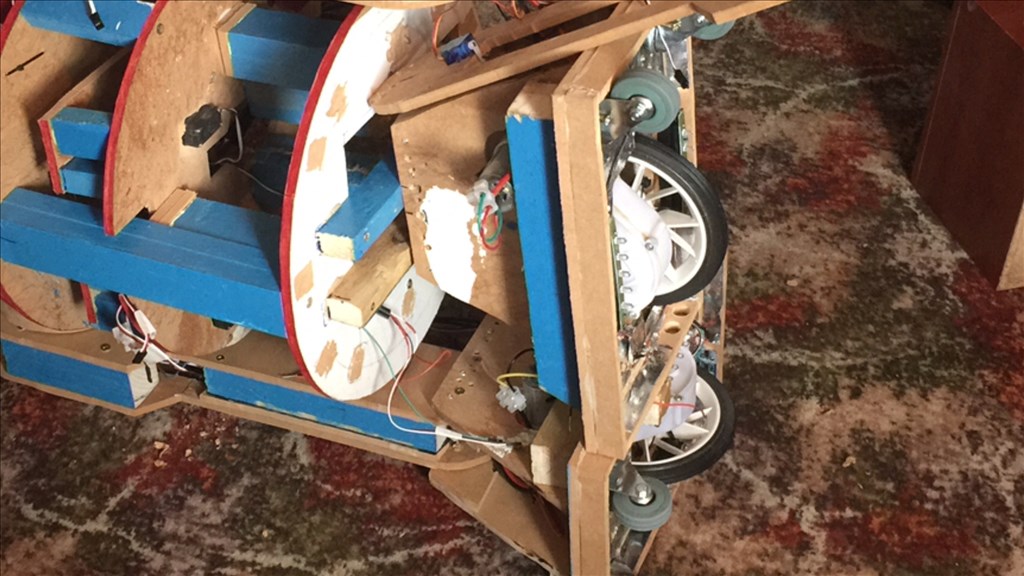
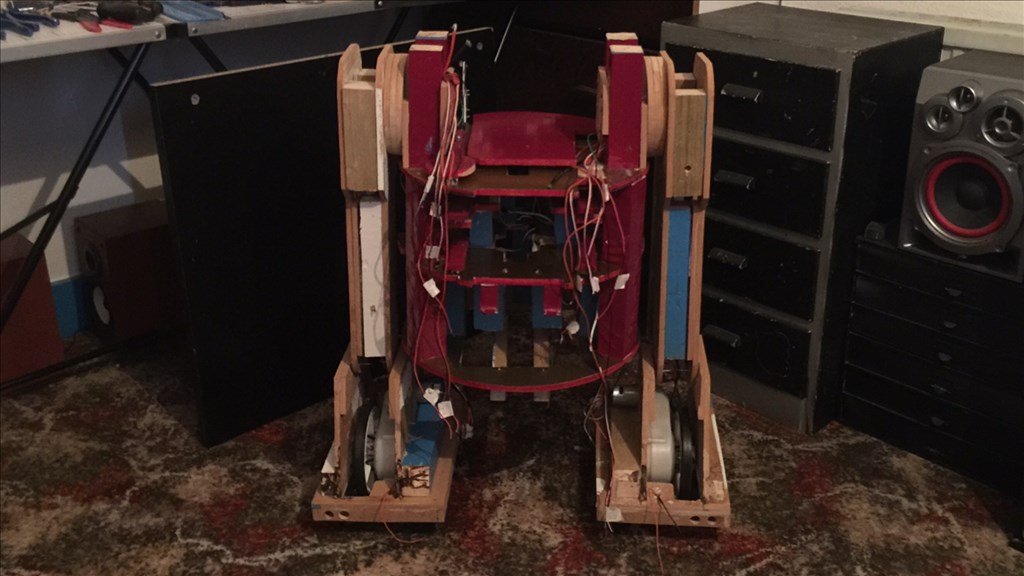
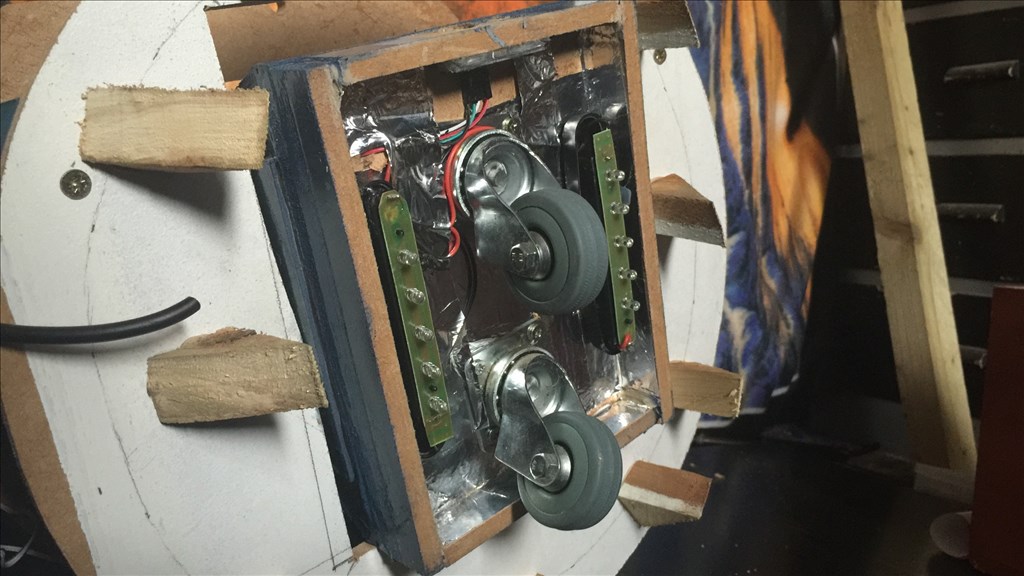
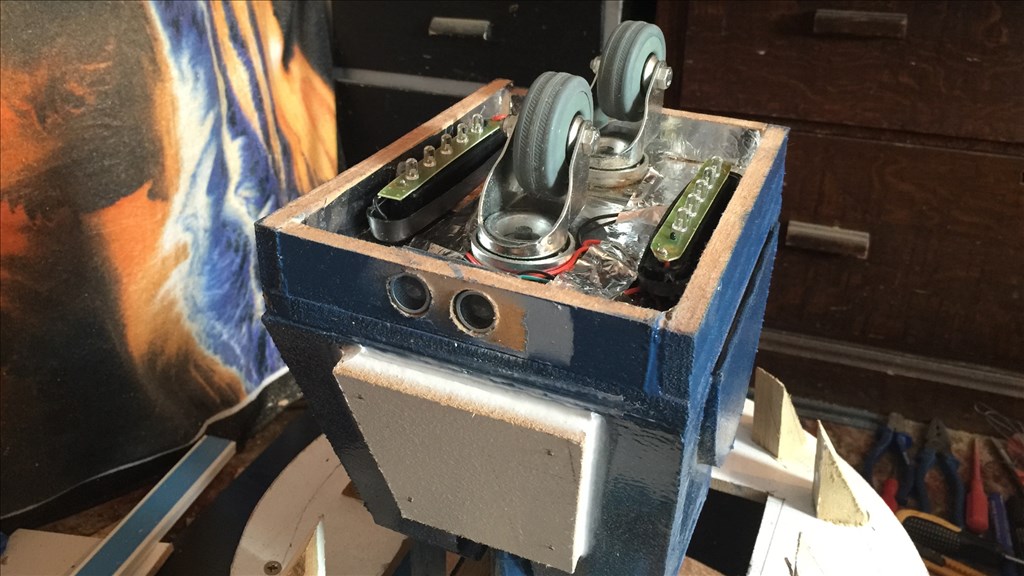
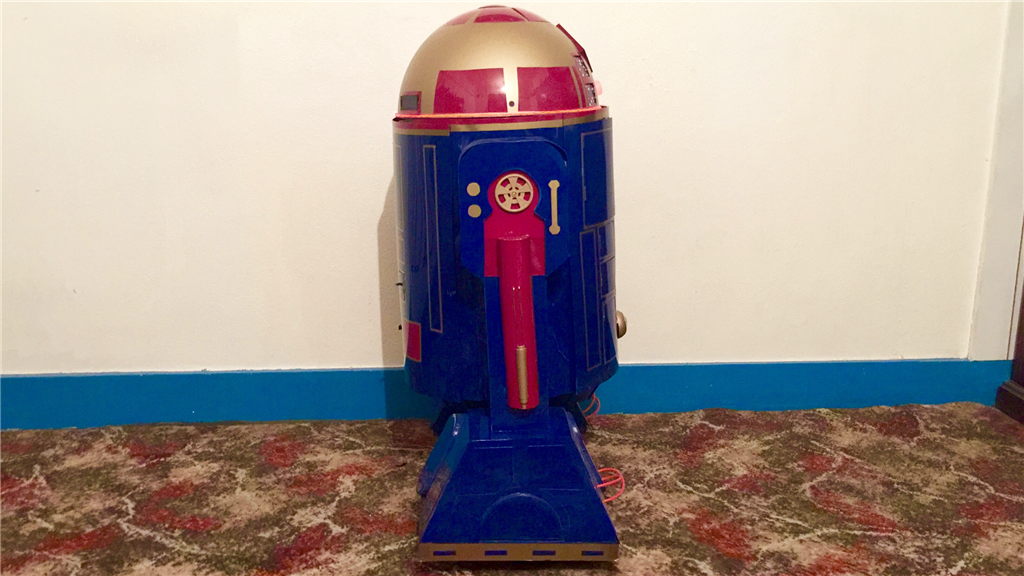
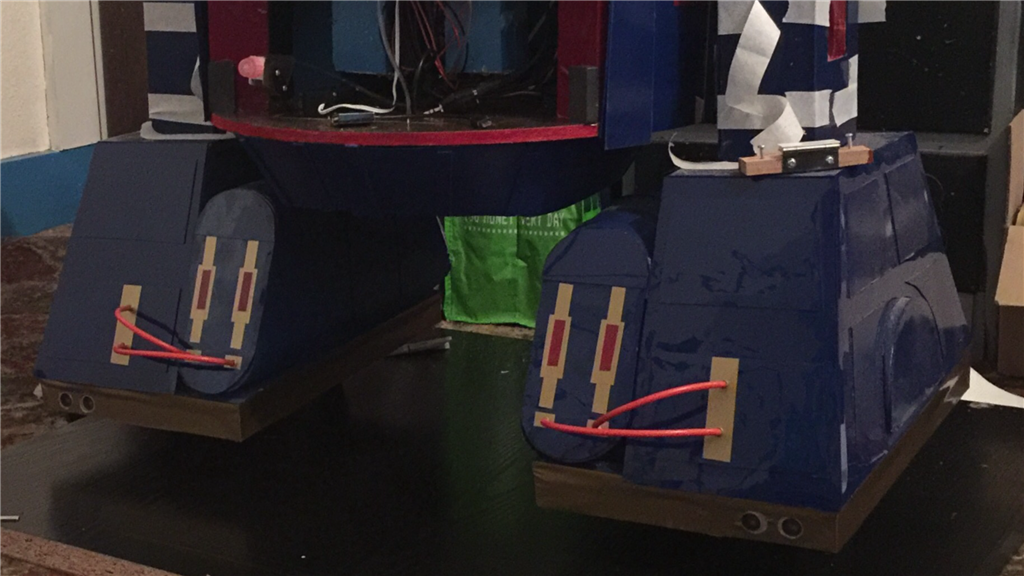
E4 had one too many cans of oil last night.
Nah, actually he was having a little bit of wheel slip when moving around the place, so I hacked up an old bike tyre (did something similar with K-9) and put the new treads around the drive wheels. He moves around sooo much better now.
I've also added servo release commands to a lot of the scripts for the SSC-32, to stop the sometimes irritating servo buzz. Ahhh, silence is golden.
I like the Rocket Man feature.... Looks cool.. I got nervous when I saw him on his back this morning. Good to know it was just an update, not too much of the preferred beverages....
Ron R
Hope the back is doing better.
Yeah the picture looked worse than it was, lol. Glad you liked the video Ron. Yeah the backs not too bad now thanks. Busy making the mobile controls today. Coming along nicely.
Outstanding, definitely seeing some good ideas especially when applying the saber motor controls
Thanks @R2d2tech01. In glad it has given you some ideas. Yes, the Sabertooth is deffinatly on my list of things to get next year, and E4-B4 will be the first robot to try it out on.
I've spent the weekend starting to build his ARC project, so hoping to post a showcase update later which you may like to see. It will have some new photos, videos, and short explanations of some of the things he can do so far.