










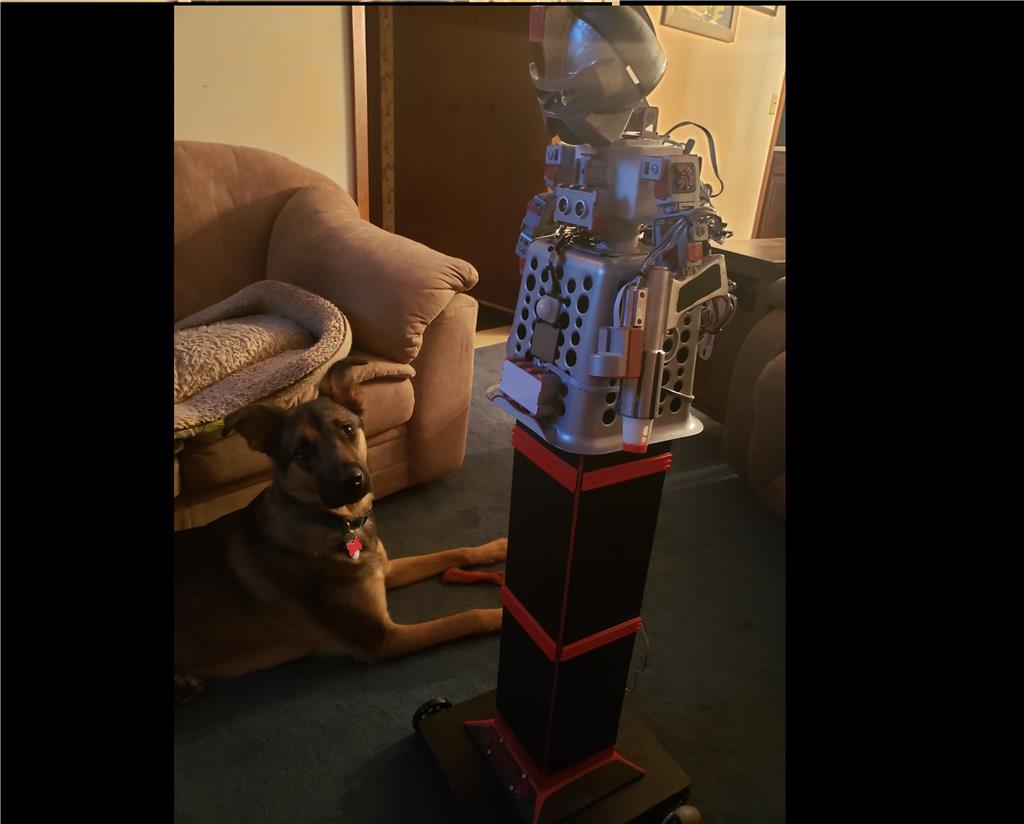

This is now Centurion, my version of a CYLON or Cybernetic Life-form Node.
I'm taking inspiration for my robot in appearance and behavior from Battle Star Galactica (specifically the "Caprica" TV show), Terminator (specifically "Terminator: The Sarah Connor Chronicles" TV show) and the AI from the tv show "Person of Interest". I want to use this robot to develop ideas I have for a security robot. Part of my inspiration from the TV shows I mentioned is the robots and AI from those TV show's don't speak a lot in terms of being conversational, they are mission focused, which I what I want from this robot. That doesn't mean I won't create a routine for the robot to tell jokes or dance, because dancing robots are cool, lol.
I also draw inspiration from Robo Rad with his Wheel Chair Robot, which has been a Cylon, a Terminator and a Cylon and a Cylon-Terminator at times. I think robo rad and I must have a similar idea at a similar time, because at one time my Centurion had a Terminator head and theme. Here is a link to robo rad's awesome robot which continues to inspire me: https://synthiam.com/Community/Questions/Wheeler-chair-robot-17408
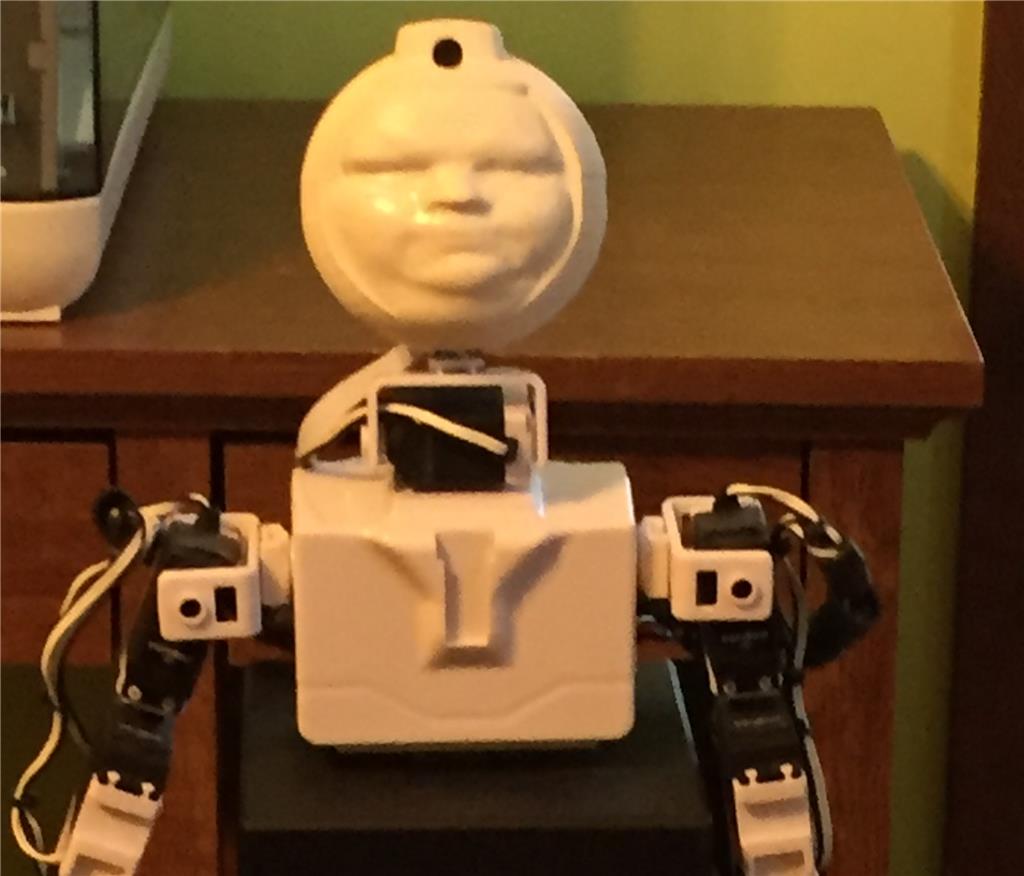
This is an older picture of "Data".

Programming
I love using ARC because it just about anything I could imagine using and gives me options to build it what might not exist yet.
One of my goals this time with Centurion is to go for minimal. I'm seeking to create as little as possible script wise and reuse script code to create a more efficient "mind" than what I had originally created years ago with the Data robot. Lean and Mean is my goal for Centurion.
With the older Data robot I tried to create a type of "mind" in ARC that could form memories and answer questions about its own actions and while I was able to meet that goal, however the way I created that ability in ARC became hard to manage and eventually I determined I couldn't keep building on top of what I originally created, script wise.
Parts & Materials
I reused a chassis I created a few years ago that originally was what I called a "poor man's inMoov" and originally it was named Data and had a Star Trek theme. Then it had a Terminator theme before the current Cylon theme.
I'm using a lot of EZ-Robot parts, including EZ-B4, an ioTiny, 2 EZ-Robot cameras, HDD Servers, gripper/claw, a JD body, several EZ-Bits plastic parts, HDD micro servos, (4) HDD continuous rotation servos, (2) wheels, ultrasonic sensors, and (2) RGB boards. I'm using the EZ-B4 to control most of the robot. The ioTiny is currently used to control an EZ-Robot Camera mounted on the toy gun as a gun sight and a RGB array mounted to the waist. The other RGB array is visible through the CYLON visor in the head.
Other parts include: 2(Omni Directional Wheels) a CD tower rack (for the lower body) a wooden craft frame from WalMart a dollar store trash bin (upper body) a plastic toy space gun from dollar store a 5-volt laser red dot several LEDs and lights various screws a bunch of servo extension cables some telephone (4 conductor) wire wire ties electrical tape hot glue plastic glue Velcro silver spray paint
3d Printed parts were made with a XYZ brand da Vinci printer with Simplify3D software:
Cylon Helmet https://www.thingiverse.com/thing:1768945
Centurion logo plates
Wil Huff inspired me think about color for my robot to make it more interesting visually. I chose a silver/black and red accent color theme. I think the red trim makes Centurion visually pop. Here is a link to Wil's video on color for his bartending droid: https://www.youtube.com/watch?v=coVjxR-ICHo
I also removed the standard battery from the JD robot body, and I wired in some heavy-duty battery cables so I can easily swap out external batteries.
Discover more robots

Robotdude's Bad Jokes

Tameion's Lawrence The Butler

Was working on my Cylon Centurion last night. I was finally ready to attach his "legs" which is a 4-wheel drive servo base.
I'm using (4) EZ-Robot HD continuous rotation servos.
(2) wheel encoders on the front from Parallax, Inc (these are the now discontinued ones from their BoeBot line) which work REALLY well with the EZ-Robot wheels in the front of the robot because those wheels have little holes on the side that the encoders detect perfectly between the solid part where the IR light is reflected back to the encoder or not reflected when a hole is in front of the sensor.
The back wheels are omni wheels I got from....maybe SparkFun (I don't remember)
The base is a wood picture frame from Walmart I painted black and the body of the legs is a CD tower.
Not only did my German Sheppard Brut want to keep licking my robot but my Cylon proved to be a little top heavy now and he fell hard on his butt. I thought my robot died honestly, but amazingly only his head slide out of the EZ-Clip (thank goodness those things were built so well).
Now I need to calibrate the drive servos, figure out how to drive him more slowly, integrate the wheel encoders, integrate the sonar scanning....take over the world....Thank DJ and Jeremie for making such sturdy hardware when they worked at EZ-Robot....make more Cylons....fill the world with Cylons lol
I was able to do some good problem-solving last week with my robot.
As my robot using 4 wheel drive with continuous rotation servos, the Movement Panel doesn't include an option for 4 drive servos, so doing a search in the community board here, I re-found RoboHappy's cute 4 wheel drive AdventureBot where his solution was to use servo Y cables to connect the two servos on the right side to one servo port and two servos on the left side to another servo port to allow the Movement Pannel skills to work, and that solution worked beautifully for me.
The reason why my robot fell on his butt and smacked his head was related to the weight on the back of the upper body from the cables and add on electronic boards like regulators and transistor switch circuits that I never originally thought about when it came to the overall balance of weight.
But more than just the added weight, the omni wheels also contributed to the fall because there is a gap between the barrels and as the robot rocked when it stopped driving, it would rock back and rock past the gap to settle on the next barrel as the resting spot and BOOM, down he went.
My solution was to build a rail on the back of the robot with EZ-BITs (5 long, 1 short and 2 pegs all painted black) and a couple of shelf brackets. It sits high enough to not get caught on my carpet and keeps my robot from falling backwards. I have to push him rather hard if I wanted to make him fall backwards now.
Nice work! Sounds like you are really enjoying this build.
Nice work, looking good ,My Cylon is only standing in the corner of the porch guarding the cottage, vacuums up the ants once a day!
I'm doing some upgrades to my Cylon. Some of my original ideas that I thought would look cool, like adding the toy space gun to the end of the arm I ended up not liking. The space gun handle ended up being in the way more than looking cool.
The second camera on the space gun arm when that arm does not have the range of motion to independently center on a target turned out wasteful as it didn't add any value in seeing a target at a different angle. It would have been good to have the second camera view if the robot's arm moved differently to independently center on a target separate from the overall robot body position and I if I also needed to verify where a projectile was going. As the space gun fires an LED and laser dot, the second camera was overkill.
I was also starting to throw sensors all over the robot just because I could and many of them were not practical.
I also had a surprising amount of wire bundles all over with a bunch of extra coiled wire for no reason other than not wanting to modify my cables in case I decided to relocate a sensor from the top of the body to maybe the feet. I'm not sure my reason for 6ft cables everywhere honestly other than it seemed like a smart choice originally but then bundles of wire were in the way everywhere, so those had to go.
Taking off the extra plastic parts, wire bundles, second camera and ioTiny, and unneeded sensors the robot lost about a pound of weight.
When I finish the modification, I'll share some new videos. Until then, I stumbled upon a Dalek voice effect that you can use with Audacity to make some pretty fun robot .wav files.
New Year - new robot fitness goals, lol
My Cylon Centurion lost some weight for 2025 and some height. A few posts back I talked about how he had a pretty good tumble, and I came up with a fix to add some skids in the back which helped but ultimately did not make him reliably stable. Ideally, he would be able to roll from carpet to hard surface floors with no issues and while his servo drive motors do technically drive over those mixed surfaces; his height and weight just didn't make him stable.
I got a proper scale to from Amazon that can run from batteries or USB power for under $40 and that helped me remove some of the unneeded bits but that still didn't help. I tried some balance sensors and had mixed results. Ultimately to achieve the reliability I wanted at the height I concluded I'd need to redesign the base with larger motors and larger wheels and I'm not willing to do that with Cylon 1.x because I'm not ready to move on to version 2.X yet.
So, I made him shorter, and cuter too.
Hi @JustinRatliff. Thanks for the update and video. These are always fun to watch.
Too bad you had to mod his looks so much. I was hoping you could find a solution to being unstable with the way he was. I guess we just can't bend physics to our will sometimes. However you sound happy with the new design. He looks good! I'm hoping you'll keep working on it and updating us.
Have fun!
Thank you Dave!
I am happy with the new modifications and his new shorter stature. It's funny how many of the design elements I thought were very important to this robot over time have been eliminated and discovered to be needless. I read a book last year on Elon Musk and one of my takeaways from the book is how he asked the question, "what needs to be removed instead of added?" It has really changed how I view problem solving.
The physics of his body being taller with a ridged base was something another robot builder ran into on YouTube and he too had to redesign his base. When I'm ready for Cylon 2.x version I think I'll go with a Rocker-Bogie type setup to allow for a taller and stronger robot. I was really impressed with this solution though: