










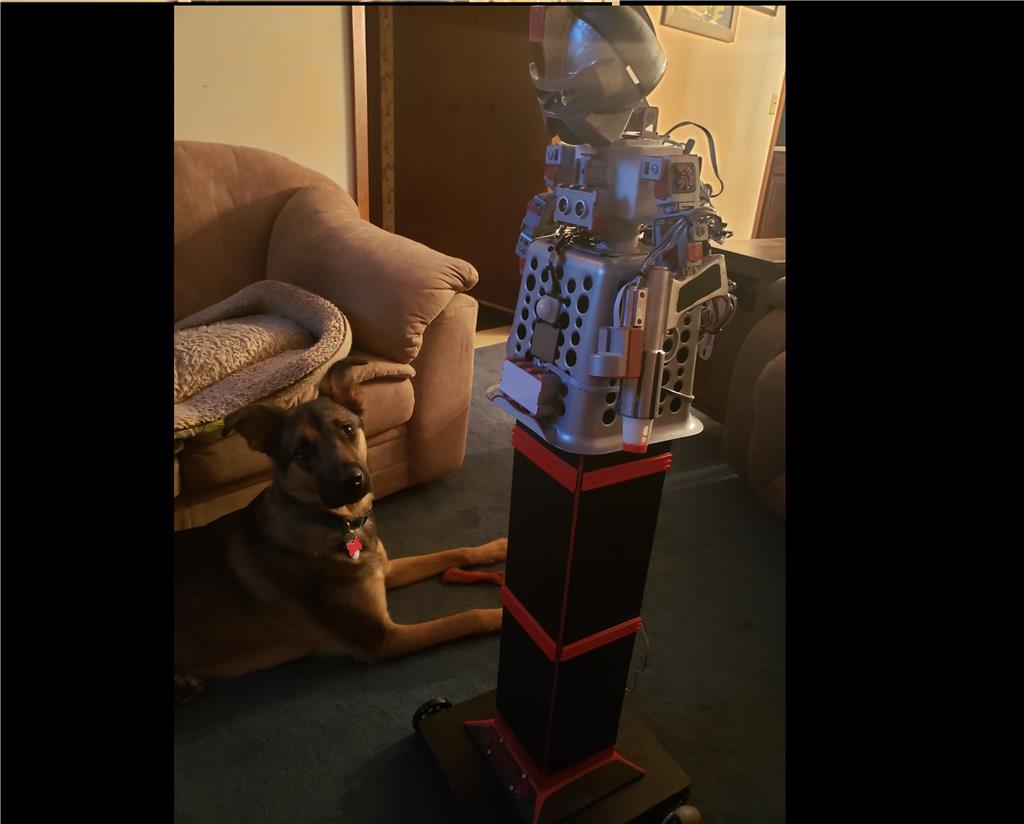

This is now Centurion, my version of a CYLON or Cybernetic Life-form Node.
I'm taking inspiration for my robot in appearance and behavior from Battle Star Galactica (specifically the "Caprica" TV show), Terminator (specifically "Terminator: The Sarah Connor Chronicles" TV show) and the AI from the tv show "Person of Interest". I want to use this robot to develop ideas I have for a security robot. Part of my inspiration from the TV shows I mentioned is the robots and AI from those TV show's don't speak a lot in terms of being conversational, they are mission focused, which I what I want from this robot. That doesn't mean I won't create a routine for the robot to tell jokes or dance, because dancing robots are cool, lol.
I also draw inspiration from Robo Rad with his Wheel Chair Robot, which has been a Cylon, a Terminator and a Cylon and a Cylon-Terminator at times. I think robo rad and I must have a similar idea at a similar time, because at one time my Centurion had a Terminator head and theme. Here is a link to robo rad's awesome robot which continues to inspire me: https://synthiam.com/Community/Questions/Wheeler-chair-robot-17408
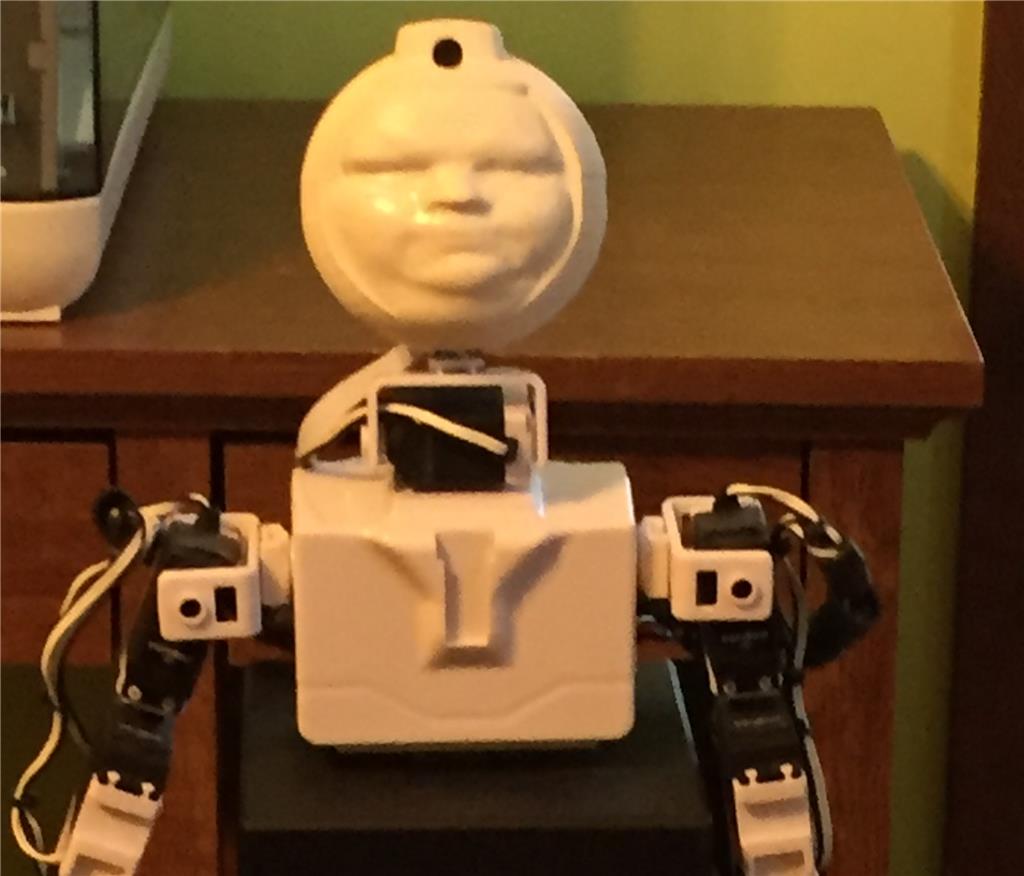
This is an older picture of "Data".

Programming
I love using ARC because it just about anything I could imagine using and gives me options to build it what might not exist yet.
One of my goals this time with Centurion is to go for minimal. I'm seeking to create as little as possible script wise and reuse script code to create a more efficient "mind" than what I had originally created years ago with the Data robot. Lean and Mean is my goal for Centurion.
With the older Data robot I tried to create a type of "mind" in ARC that could form memories and answer questions about its own actions and while I was able to meet that goal, however the way I created that ability in ARC became hard to manage and eventually I determined I couldn't keep building on top of what I originally created, script wise.
Parts & Materials
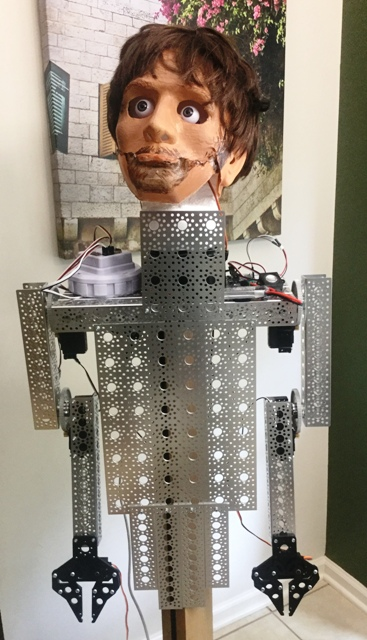
I reused a chassis I created a few years ago that originally was what I called a "poor man's inMoov" and originally it was named Data and had a Star Trek theme. Then it had a Terminator theme before the current Cylon theme.
I'm using a lot of EZ-Robot parts, including EZ-B4, an ioTiny, 2 EZ-Robot cameras, HDD Servers, gripper/claw, a JD body, several EZ-Bits plastic parts, HDD micro servos, (4) HDD continuous rotation servos, (2) wheels, ultrasonic sensors, and (2) RGB boards. I'm using the EZ-B4 to control most of the robot. The ioTiny is currently used to control an EZ-Robot Camera mounted on the toy gun as a gun sight and a RGB array mounted to the waist. The other RGB array is visible through the CYLON visor in the head.
Other parts include: 2(Omni Directional Wheels) a CD tower rack (for the lower body) a wooden craft frame from WalMart a dollar store trash bin (upper body) a plastic toy space gun from dollar store a 5-volt laser red dot several LEDs and lights various screws a bunch of servo extension cables some telephone (4 conductor) wire wire ties electrical tape hot glue plastic glue Velcro silver spray paint
3d Printed parts were made with a XYZ brand da Vinci printer with Simplify3D software:
Cylon Helmet https://www.thingiverse.com/thing:1768945
Centurion logo plates
Wil Huff inspired me think about color for my robot to make it more interesting visually. I chose a silver/black and red accent color theme. I think the red trim makes Centurion visually pop. Here is a link to Wil's video on color for his bartending droid: https://www.youtube.com/watch?v=coVjxR-ICHo
I also removed the standard battery from the JD robot body, and I wired in some heavy-duty battery cables so I can easily swap out external batteries.
Discover more robots

Daedalus's Android Robot
DJ's Jd Connects To Nest Thermostat

Since I started Data a while ago, his body has mostly been sitting on a shelf. But now I have some new thoughts on using his chassis and changing out the parts on the fly so I can have both a "Data" and a "Terminator" robot depending on my mood and what I want to experiment with.
2 robots in one....would that make him a "Transformer" as well?
Lol, TermiData, that's great!
nice project.how did you made the 3d print off yourself,if i may ask?
Thanks Nomad. I used a 3d scanner, the XYZ handheld brand. Then I used Tinkercad to manipulate the .stl and integrate in the JD head form. Then printed on my davinci printer.
I always wondered how people did this.thanks for the info. i use tinkercad alot.
I've made a few updates to "TermiData". I'm getting excited about this build. I know how much fun RoboRad was having with his build now! I can't wait to load some sound files and have this thing moving around. I'm also really looking forward to experimenting with robot ethics with this guy.
An "ethical terminator"...which is Jeremie's doing (for the ethical part) from the Artificial Conscience discussion that has inspired my deeper dive into robot ethics and laws and compliance. Which is something I was studying before, but now I want to test ideas.
That is cool that you have the servo movements for the Terminator skull, I really can't get that on mine because the chrome process seems to have welded the neck bones to the head very tight, I am sure I could crack it apart but the chrome is fairly thin and could make unwanted stress cracks in the rest of the skull.Good job though!
Weapon arm update.