
Hi
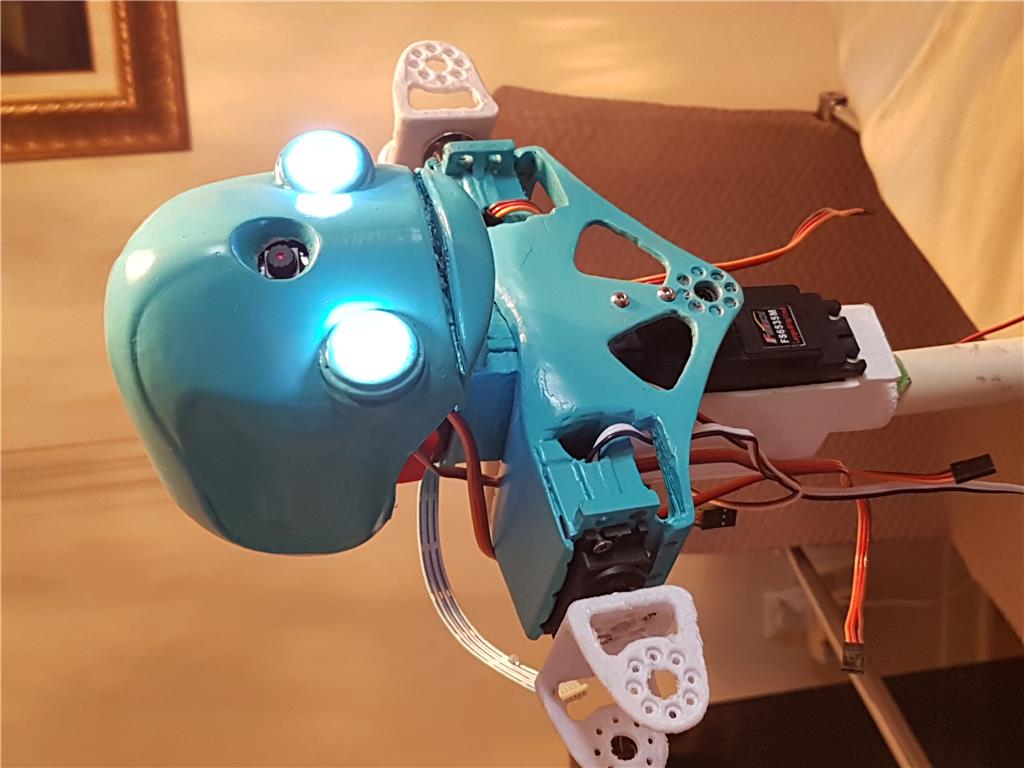
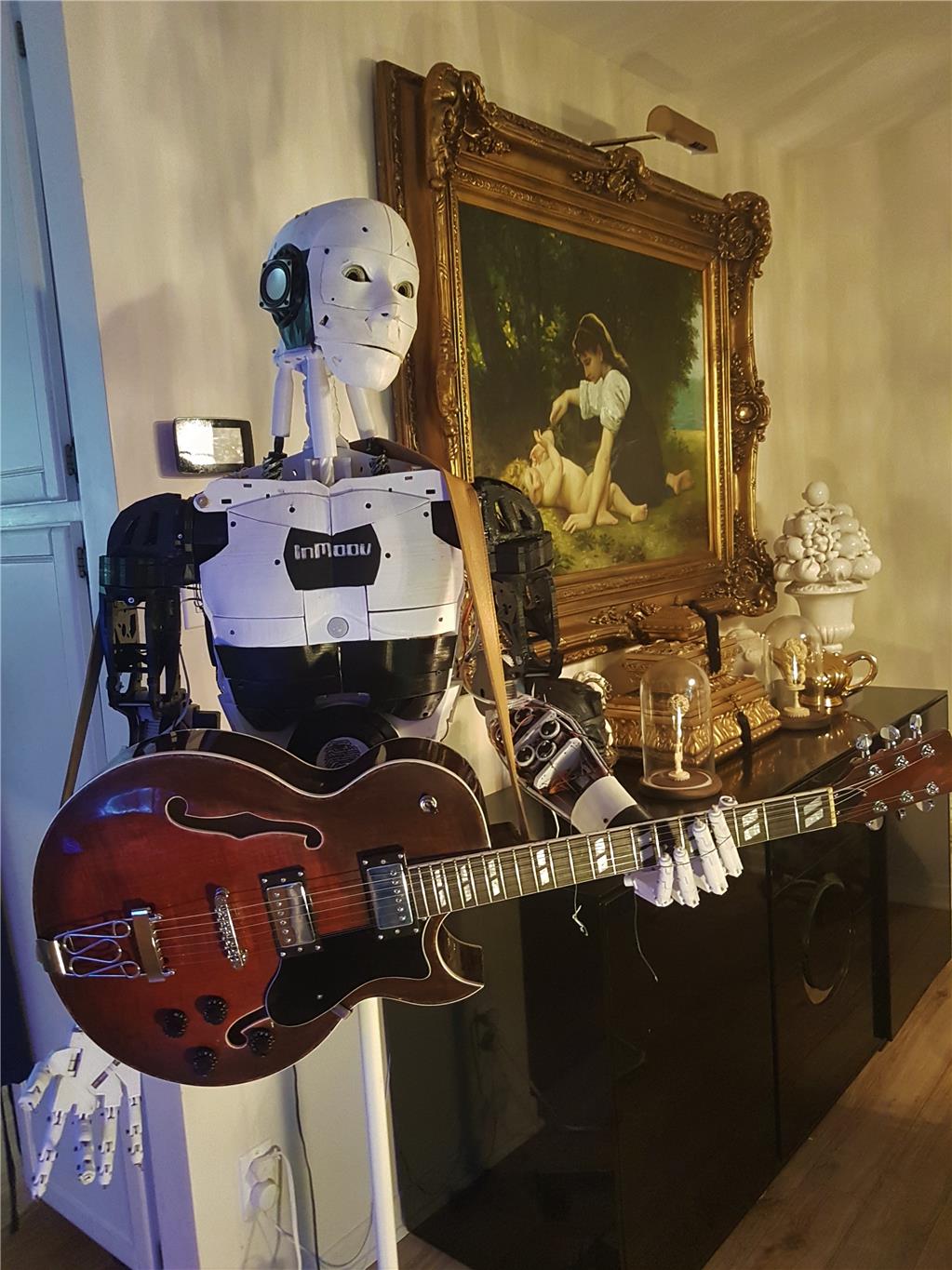
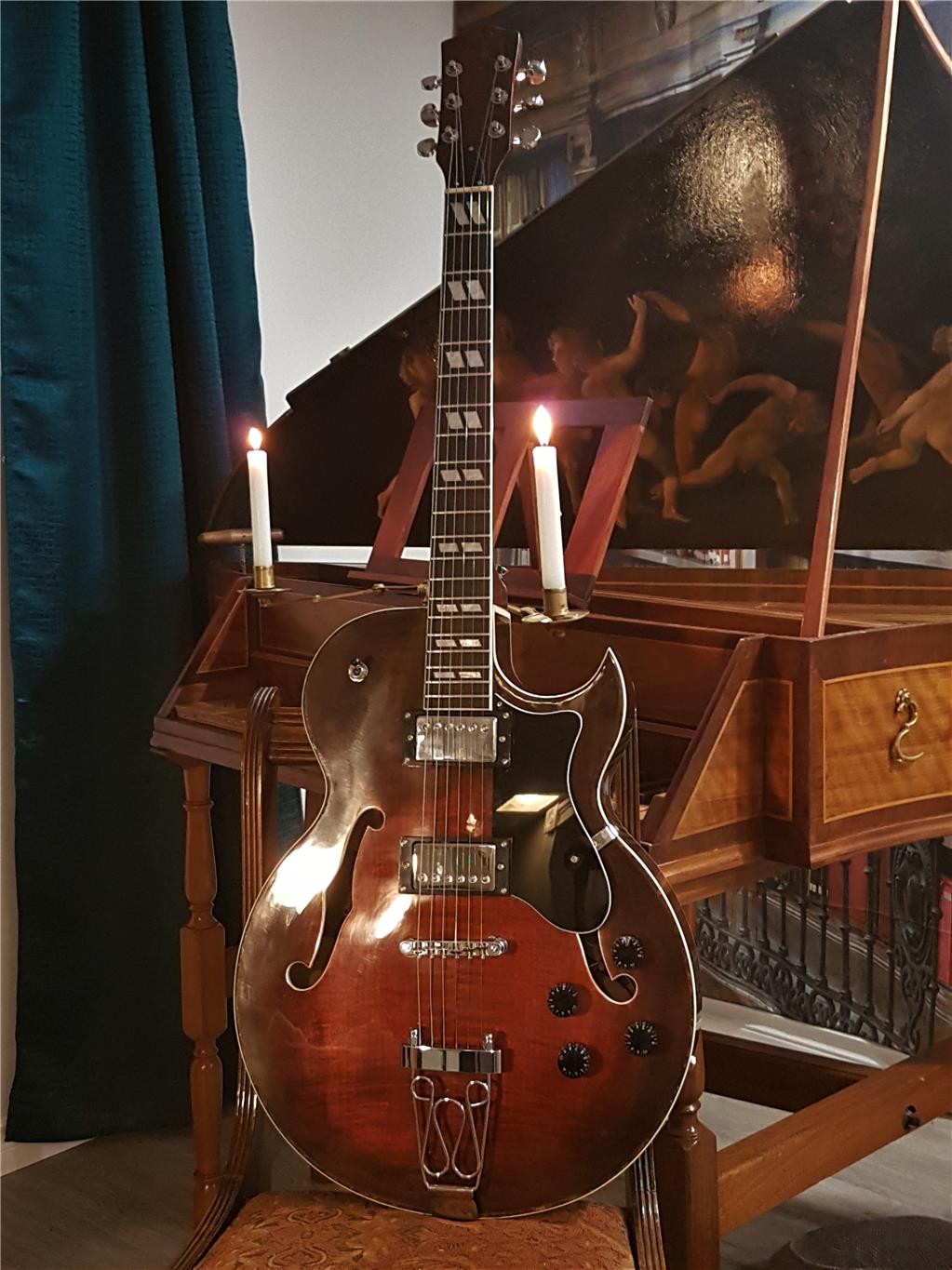
I have been printing the files that were generously supplied by Mickey666mauss for his creation of Zoe. I was interested in the original Zoe head as it just appealed to me as I wanted to have a socially interactive robot and I feel that robot would not be viewed as to human looking and get a negative reaction. like my inmoov and buddy my human looking robot head seem to get on occasion. I wanted to have my Zoe have a mouth so emotion could be verbal. so I have added a mouth on zoe which I think looks very good and also works very well. Other changes I have made to Mickey's design, I have a lot of regular servos mostly metal gear, I decided to make my version of zoe with standard servos and using a EZ-robot V4 Controller as this is what I am more comfortable with. of course I had to alter the parts of zoe to fit standard servos, which was not an easy task as I feel I am not that good with Cad design. but I managed to make due. This version of Zoe will be mobile mounted on a mobile base and I have lots of design to complete to make that happen. My version of Zoe is not complete but most of the parts have been printed. I have had a belt self destruct on my delta printer and I am waiting for a replacement and during this pandemic it will take a while. the arms are almost complete but I will add pictures of that and Zoe moving later. the pictures I have downloaded show Zoe and Zoe with eyes illuminated. the camera is also installed the lights are bright so Zoe can see better in the dark.







Are those Poppy arms?
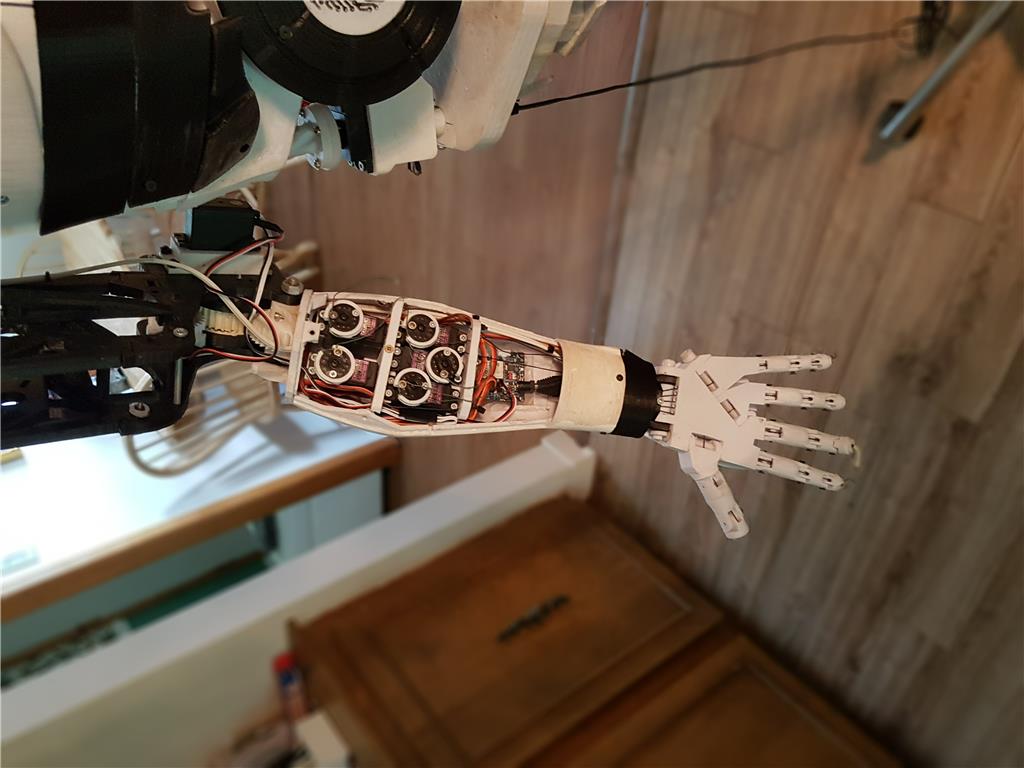
@Perry_S Yes A lot of parts came from other Robots The forearms were modeled after poppy, poppy uses dynamaxel servos or ones like that so they had to be totally redesigned but I liked that open concept but cog's design came from 3 robot designs. when you are not good with cad programs you use what you can get quiet a few parts came from Zoe Mickey's design Curious after you sold your inmoov it's been quite a while, have you been working on a new robot design, I know you have design skills.
Oh I like this. Thats a nice design. Will be cool to see it in action.
This looks great!! Its so nice to see that ZOE has a brother now, she was a bit lonely before!!
I am absolutely loving it!!
I actually never thought of having a mobile base for my robot, I always wanted to keep it stationary. But this approach looks really neat!!
Keep us updated, its looking awesome!!
@RoboHappy Thanks Robo There is still a lot of work to do. @Mickey666Maus Thanks Mickey, I like the Idea ZOEs Brother COG. The Mobile base is why I wanted to make this robot, my Inmoov robots could only do so much just standing. With large robots like Inmoov you have to be so careful as they can tip and fall if you try making them mobile. the damage is to much, both time and money consuming. COG is easier and more robust. I still have to make some design changes though one you noticed with ZOE the shoulder to arm connection is definitely a weak point, I have to do something like your Ball Bearing approach. the servos are all metal gearing and connections but it is a bit floppy. another issue is battery charging. I want cog to roll up to a charging station when the battery is low automatically like DJ's robot in a past Live Hack. this uses magnetic probes. I wish I had your skills with design thanks again Mickey . It's all fun.
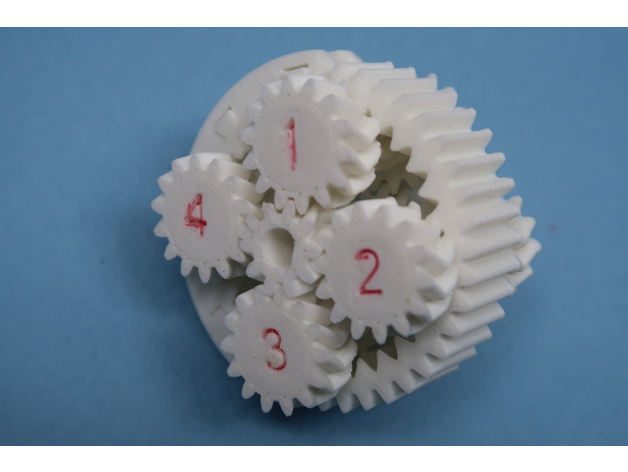
Hi Nallycat, Yeah I am still at it. Bought a new house and moved so that took me out of the game for a bit. Back at it now. Was just printing some robot parts last night. Been interested in walking robots lately. I had my fun with inmoov and considered it quite an accomplishment. When I was done though I ran out of things to do with it. There was no conversational AI available and I did not want to go back to My Robot Lab just to get it. The dexterity was not there to perform meaningful movements. It is a human simulator without human functions. Part of that is on me as I do not have the skills to develop the software to get it to do what I want. So I am kinda stuck waiting for things like ProgramAB to be implemented. So I have had a hobby robot (inmoov) that can wave arms and what have you and don't really want to build another one of those. That is why a walker kind of appeals to me. I have spent a lot of time lately working on actuators and that has been really interesting. 3D printed gearboxes and brushless DC motors.
@Perry_S please share your progress, I am also currently working on 3d printed gearboxes and brushless motors...I will make a post soon, still waiting for parts! I am in the middle of designing and testing Cycloidal reducers...its becoming a bit of an obsession I must admit!! But pleas let us know how you are progressing!!
Hey Mickey, Let me pull together some pics and what have you. I built a cycloidal as well but the vibration was pretty intense due to their nature. 2-stage Planetary are working well.