

First crack at my beer buddy a few more lines of code for opening the fridge adding some led light strips and good to go. Updated video to come but this is what I have so far.
By RobMcc
— Last update
Discover more robots

Animator28's AVA (Advanced Visual Android) Update
3D-printed robot head using micro DC motors with H-bridges and EZB, screen face with projector-driven animations, TTS...

DJ's Teddy Ruxpin Robot V1
Teddy Ruxpin robot with EZ-B brain and Synthiam ARC: Bluetooth control, voice synthesis/recognition, servos for mouth,...
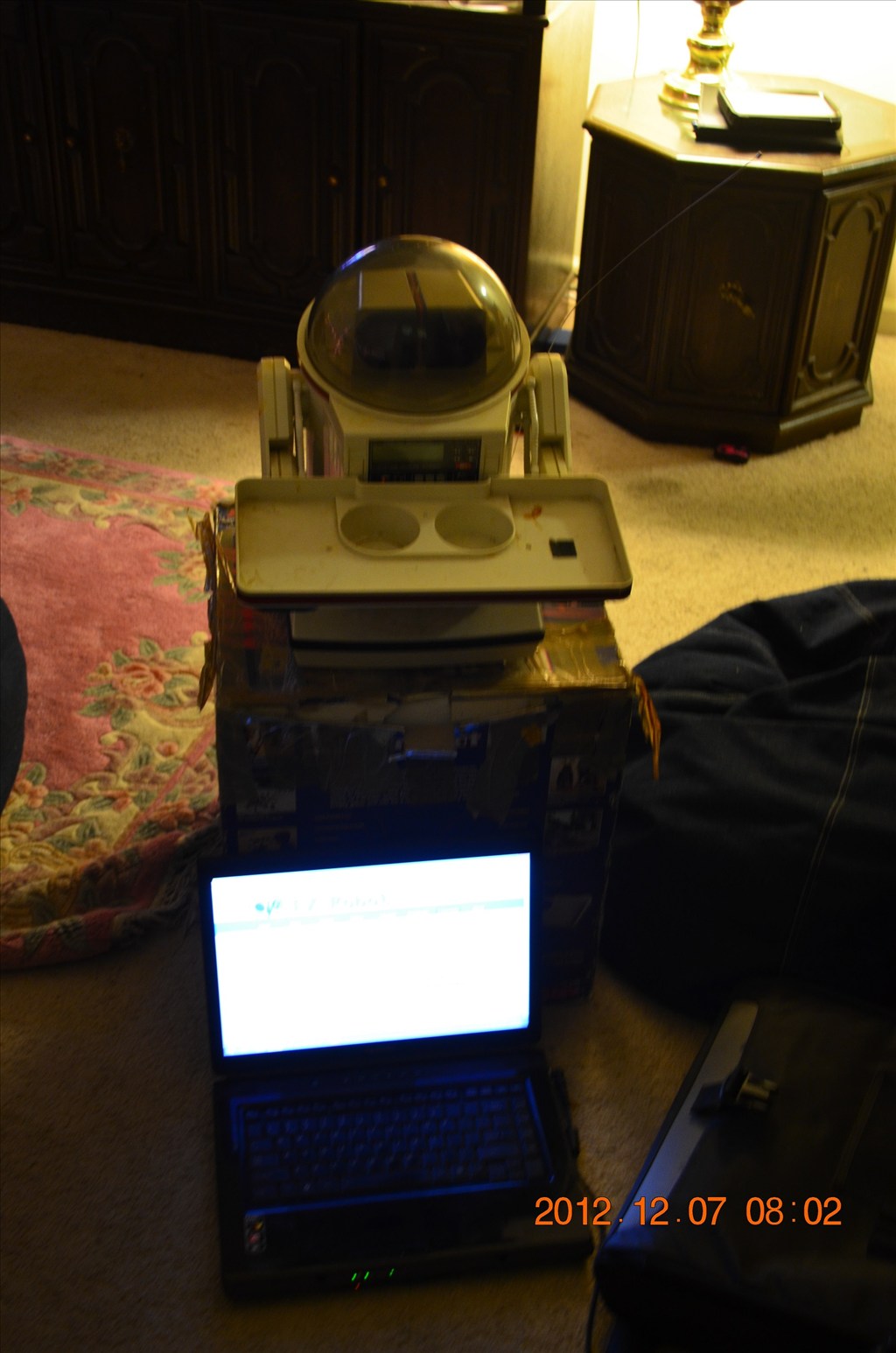
Herg62123's Omnibot 5402 Project - Code Name: Minion 8
Convert a 30-year OmniBot into Minion 8-integrate a laptop, keyboard tray, eye projector and ez-b kit for a Windows 8...

Here it is Brewster the beer buddy updated video.
That is great, did it pick the music? lol
j
@RobMcc very nice job and video !
We assembled a beer bot with Revolution today Sadly, ours is no where near as cool! Man your robot is my favorite
Sadly, ours is no where near as cool! Man your robot is my favorite (not just because it brings me beer)
(not just because it brings me beer)
Roli and Six are bring the beer to jd the robot. lol Yes, Brewster is the beer robot and now he is off to party. j
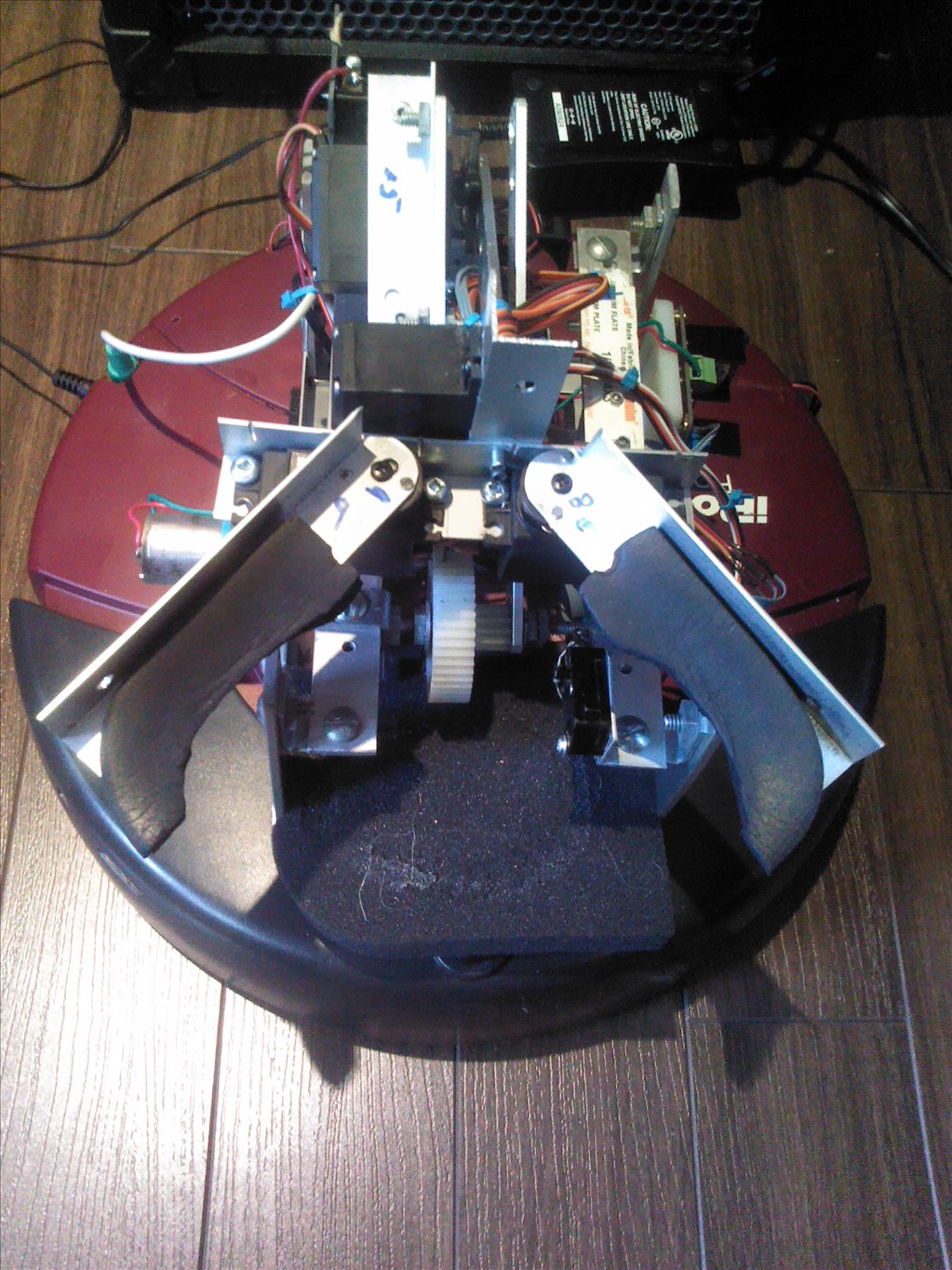
RobMcc, That is an amazing robot. How do you make it track so straight from script? I observed you used several speeds. My Irobot platforms, Create and Roomba, always have a slight ARC in straight movements. If I use faster speeds, the ARC is minimized. Can you share your script? Thank You Steve S
Hey Steve S, It has been a bit of a challenge but thanks to this post I'm sure it will help you out as it did for me. There is alot of excellent information and website links. https://synthiam.com/Community/Questions/2747&page=2 As for my script needs a little clean up but here is a sample to get the Roomba to go straight. Although running on carpet is totally different. lol Good luck hope it helps.
Roomba Wake
IF (getdigital(d19)=0) print("Roomba is Resetting") Set(d19,on) ENDIF Sleep(1000) Set(d19,off) Sleep(1000) Set(d19,on) Sleep(2000)
Roomba(init)
Beep Hi
SendSerial(D0,57600,140,3,1,90,32,141,3) Sleep(1000)
Fan On
Roomba(VacuumOn) Sleep(1000) ServoSpeed(d8,5) ServoSpeed(d9,5) ServoSpeed(d10,5) Servo(d10,90) Servo(d8,90) Servo(d9,0)
Forward Command
SendSerial(D0,57600,137,0,180,128,0) Sleep(5000)
Turn Right Command
SendSerial(D0,57600,137,0,100,0,1) Sleep(2020)
Forward Command
SendSerial(D0,57600,137,0,180,128,0) Sleep(10440)
Turn Left Command
SendSerial(D0,57600,137,0,100,255,255) Sleep(2030)
Forward slow Command
SendSerial(D0,57600,137,0,100,128,0) Sleep(2000)
Stop Command
SendSerial(D0,57600,137,0,0,0,0)
i just saw the video, EPIC!