


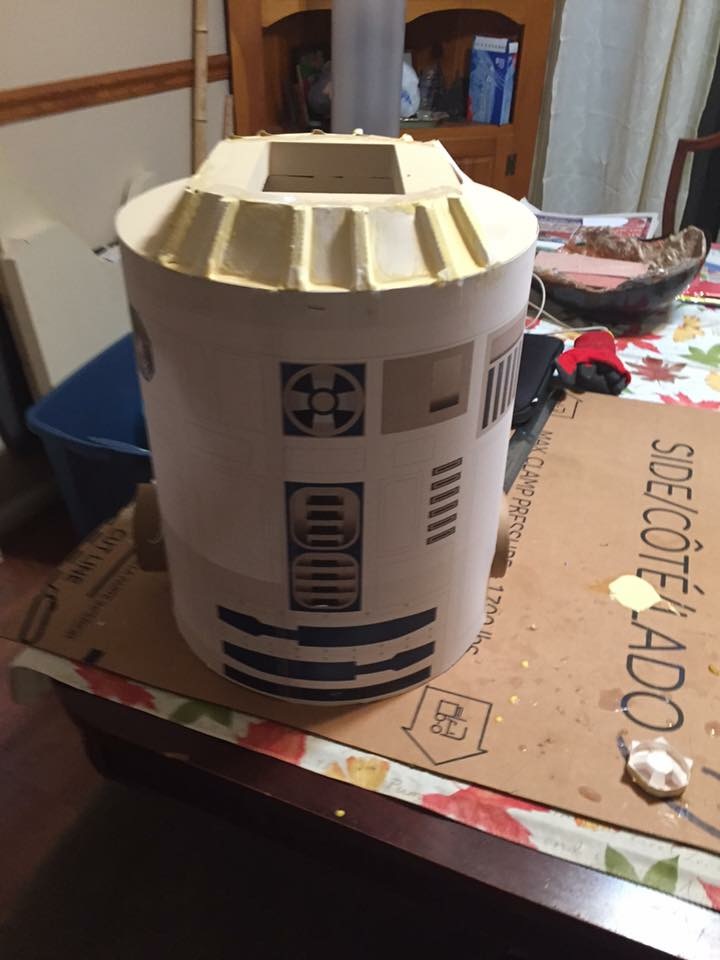

Have only been here as a member for a day now and quickly received great info from another member building an r2 from a Walmart r2 he purchased. A bit of background to my project... Always wanted an R2 since seeing the first Star Wars in 1977. Shows my age..lol Nevertheless, hasbro came out with the interactive R2 quite some time ago and I immediately scooped one up. While he could do just about everything I wanted in a robot, he isn't quite the size that I wanted and a few more bells and whistles would be nice but not completely necessary. That said I began this past summer building my own R2 from mixture of files I put together provided by the astromach building group and a pepakura group I belong to. I decided to build a 2:3 scale version because in all honesty I don't believe Lucas would've had r2 be 40+ inches had he not needed a person to be inside to control him back in the day. Plus, I just don't want one that big. So mine will be about 36" when its all done. Initial plan was to build him light weight using styrene, hdu signfoam, card stock paper for the details using pepakura,and fiberglass. Thought behind this was to do as light as possible so that I could use the insides of an interactive r2 to bring him to life and secondly... His weight would not be a safety issue should he run into something or someone. That said... The newer interactive r2 comes with a controller, many functions and has voice commands like my version all for $140.00. To build using the ezrobot that already places me well above the cost of the toys r us one. So what benefits would come from ezrobot over using the insides of an already fabricated r2?
Discover more robots
Teslatool's My Robot : Boybot

Redzone's Inmoov With A Slight Modification


This is a calculation based on the size radius of the wheels and the torque of the motor. It also depends on how fast you want the robot to move (rpm) times the diameter of the wheels.
How large are the wheels you want to use?
https://www.robotshop.com/blog/en/drive-motor-sizing-tool-9698
Here is a link that will help you with the calculations.
I'm thinking something along the lines of a rollerblade wheel....which would be 58mm-60mm. I don't want him to go from 0mph-60mph in 2seconds. Was thinking about 5mph at most for top speed and low pickup to top speed so he doesn't fall over or do a wheelie lol. Also needs to carry 30lbs - 40lns without burning up. Asking a lot huh? Lol
There are plenty of motors and wheels available that can do that. You will need an h-bridge sized for the amperage of the motors you select. If you are on a budget, it is pretty easy to find "Power Wheels" children's ride on cars at thrift shops or through freecycle. Usually the body is messed up or the battery is dead, but the motors are usually good and they are designed to move a 60lb child at 5mph.
If you keep the gear boxes (which slow them down and give more torque) they are kind of loud though.
Alan
Sounds like you want ramping probably, which is handled on the device driving the motors (like a kangaroo/sabertooth combo) or you would could code it on an arduino type device running the the motor driver and connected to the V4 in a couple of possible ways, or you could use scripts in ARC possibly to do this too.
Kangaroo/Sabertooth option is the most expensive but the easiest to implement. It gives you light load on the V4 and computer to do it this way.
Arduino connected to the V4 gives you the ability to code the arduino to handle this any way that you want to do it, but is the most time consuming. This gives you the benefit of the kangaroo/sabertooth option but requires you to do all of this coding. It gives you light load on the V4 and computer to do it this way and is pretty cost effective depending on your arduino programming experience.
ARC scripts could be used which keeps everything nice and tight in your ARC package. It requires some script programming and could offer similar benefits of the two listed above, except that it will be the heaviest load on the computer and the V4. Your script will determine how much this load is.
Yeah I've seen people use those as well as electric scooter motors. Not trying to move a 60lb+ object.
Like I said earlier... Am avoiding significant weight as much as possible. If For some reason he goes over 40lbs I'm going to rethink my design.
The powerwheels and scooter motors I've heard and seen people mounting those on their 300lb units... Very loud too.
Powerwheels motors are quite small and light. Nothing like wheelchair /scooter motors or even windshield wiper motors. They are designed to move up to 80 lbs, not the 3-500 of a wheelchair.
So if I bought a sabertooth that would be essentially my motor control and a kangaroo board would then tell the motor control to how fast to go, etc? That said, an audrino would then tell the kangaroo what you wanted them to do for reaction to either rx info sent, motion sensors, etc?
If I just simply used the ezb... then I would have to tell the ezb via programing, if a happens then do b, etc. Then after uploading that to the ezb for multiple actions it would be able to perform but all of that info would have to be sent via my computer.
So does this make the ezb essentially a relay of information where as an audrino is capable of self thinking/reacting? And Kangaroo is essentially like a speed controller?
The kangaroo x2 actually isn't too expensive. There is definitely a lot of nickel and dime'ing in this hobby. Not much unlike when I had my quadcopter..lol