











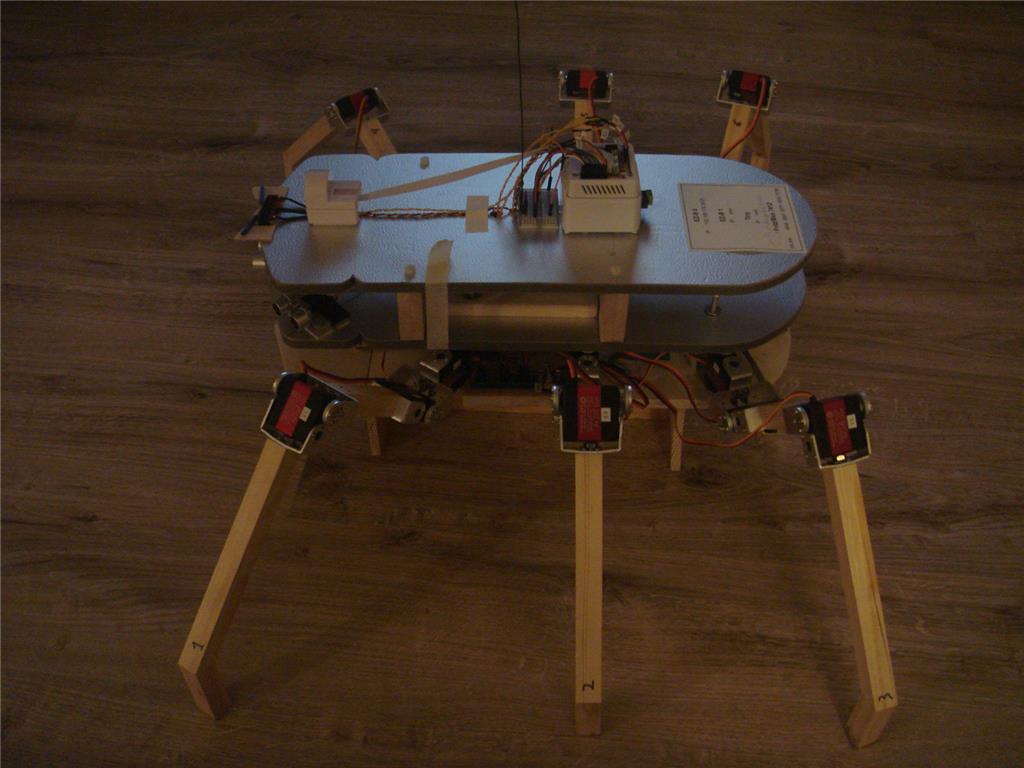




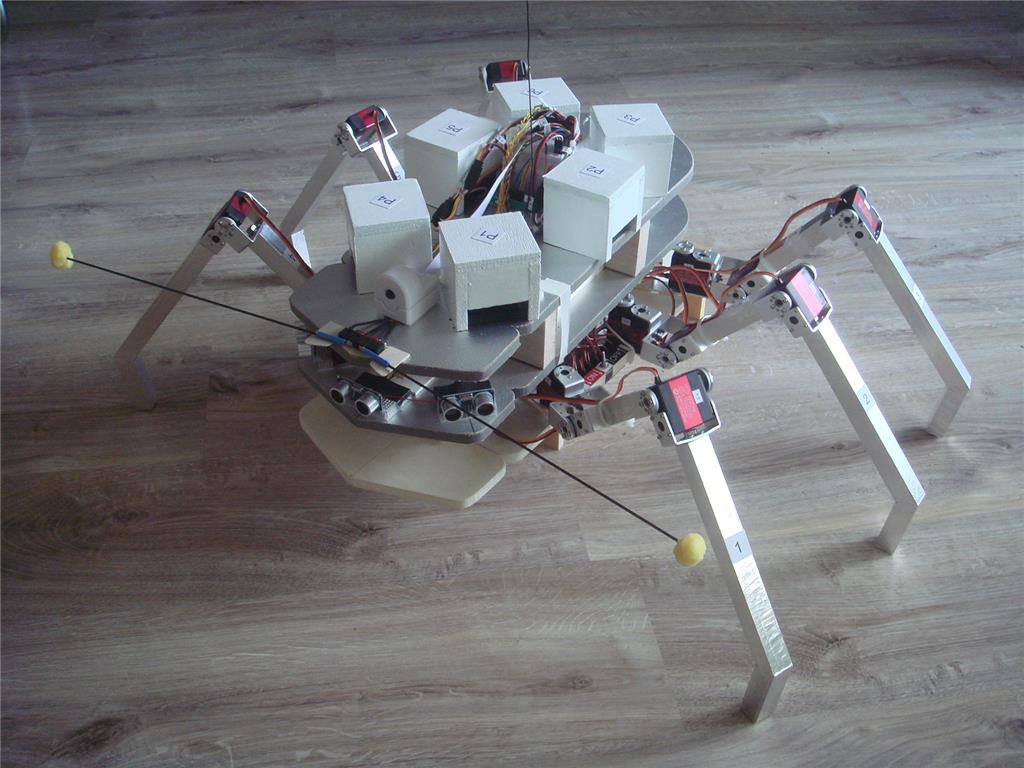

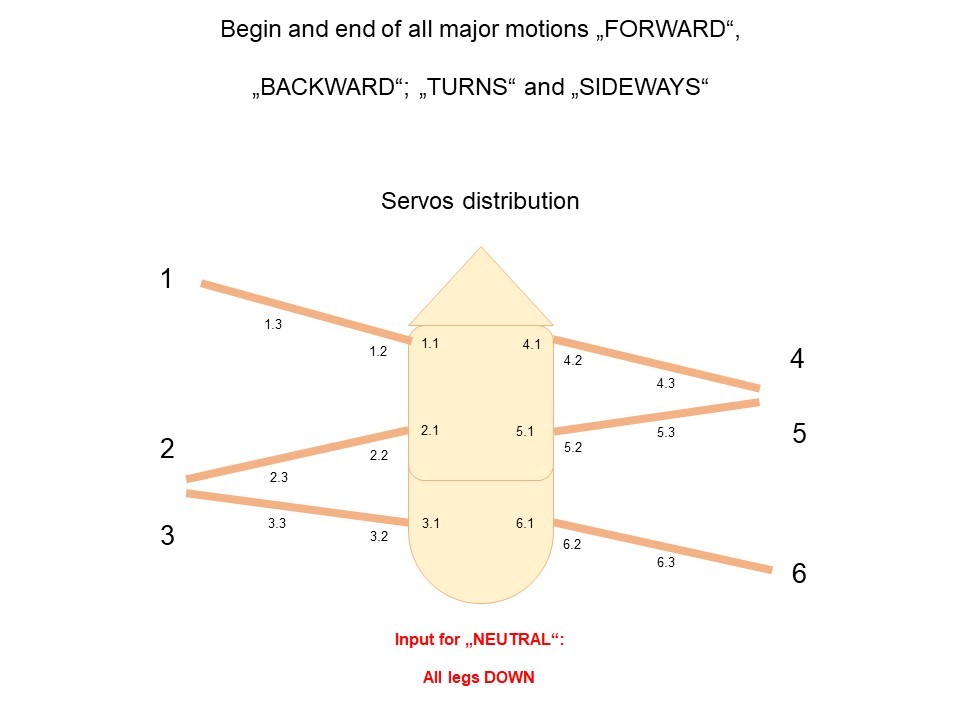
Hi guys, this is the first introducing part of a series, describing an autonomously operating hexapod with about 1 m width (my "large insect"). Idea behind this project: From early childhood on I wanted to build a kind of "mechanical turtle" or similar, being able to "survive" in the garden from spring to fall and doing whatever it would be programmed for, recharging its battery, seeking for shelter in case of rain, etc. Decades later (meanwhile a retired physicist, phd after 30+ yrs. in the space business) it was really time to realise this dream, meanwhile based on modern state-of-the-art electronics and software. Then, a colleague suggested to acquire an EZ-B V4-2 as the core element for such an undertaking and from thereon things picked up speed quite rapidly. As mentioned above, goal is the realisation of a quite large autonomous hexapod. The figure below is illustrating the general shape of this robot as well as the nomenclature for the legs (1, 2, , 6) and the servos (1.1, 1.2, , 6.3), respectively.

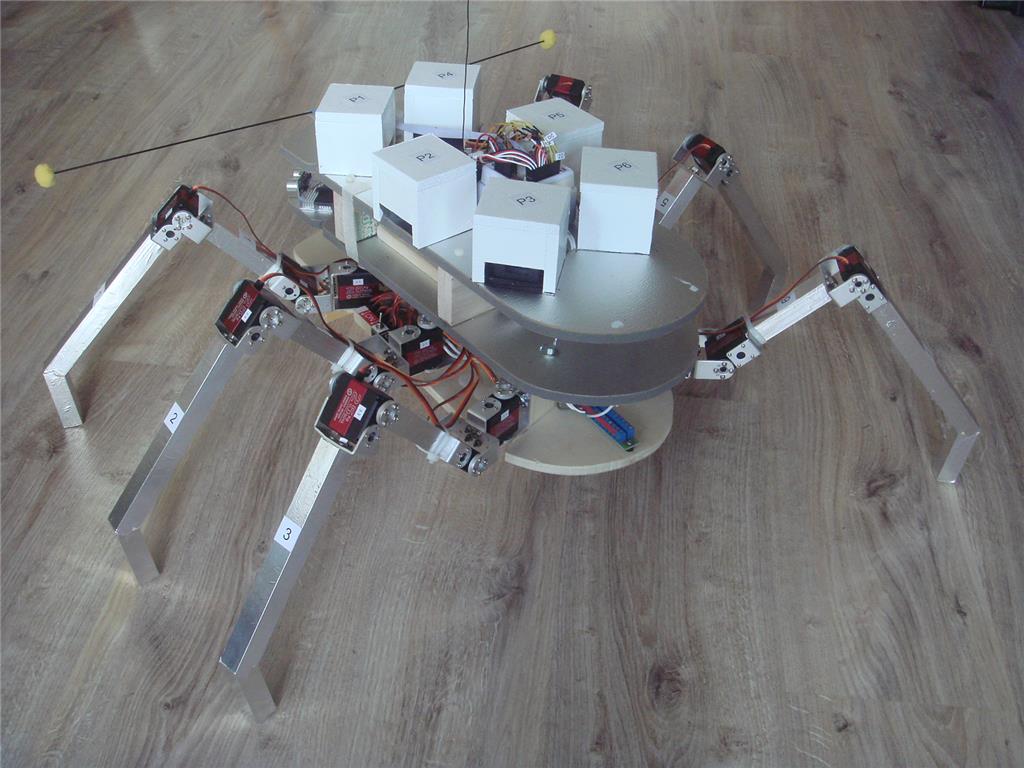
The base plate is made from 10 mm plywood and the legs from 20 mm x 20 mm pine wood. servo base blocks: 20 mm pine wood. A further light weighted plate (2nd floor) will be added later for accommodation of a scanning lidar, etc.. The hexapod’s legs are moved by 18 servos (Longrunner B07K68MK3Y:

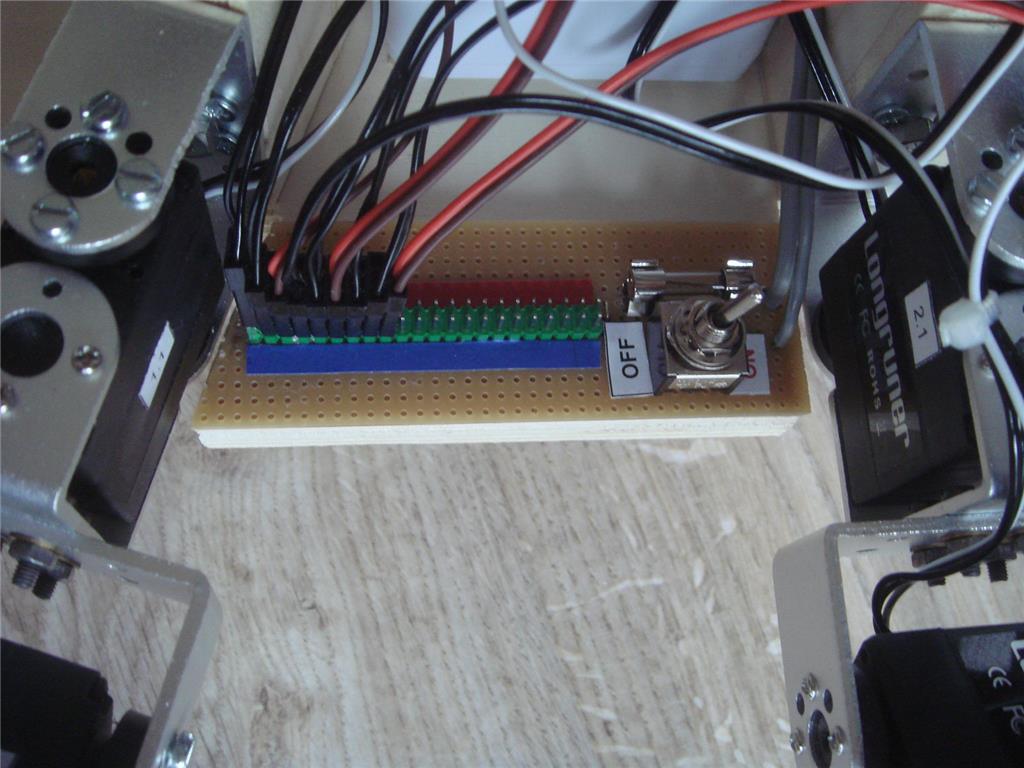
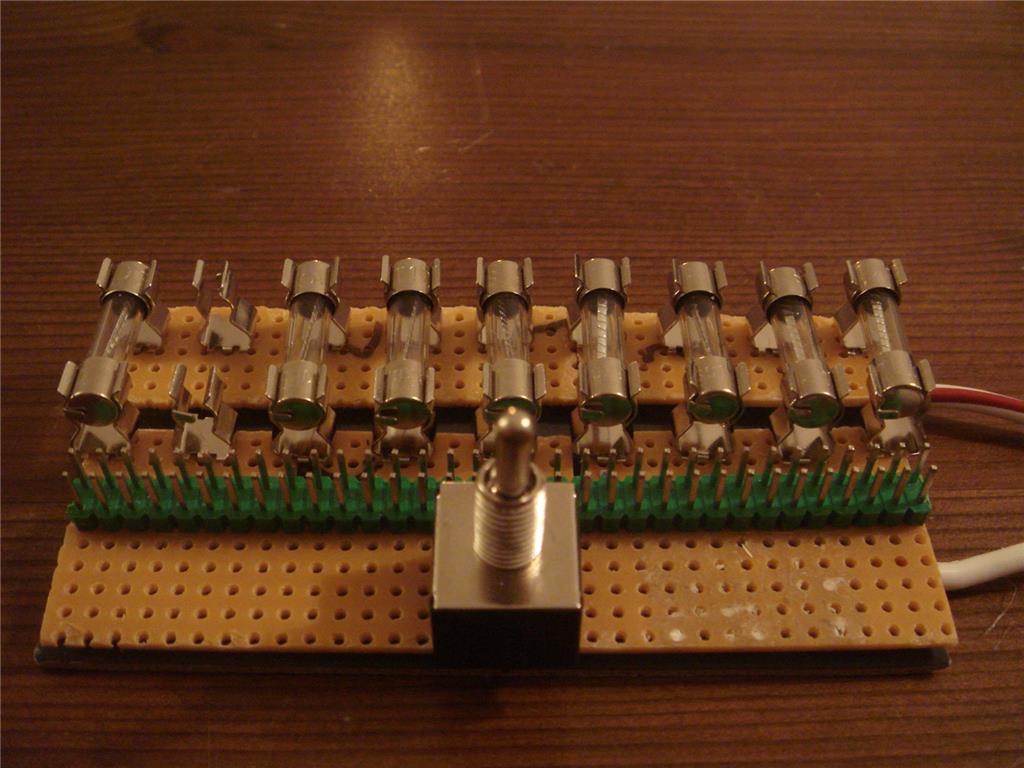
In order to suppress unwanted rapid servo motions during EZ-B initialising, a switchable power distributor was added for each side (servos 1.1 through 3.3 and servos 4.1 through 6.3, respectively). These units are served by a central 2S2P LiPo battery (10.000 mAh) and are protected by individual fuses and are galvanically connected to the EZ-B.

Only the signal pin of each servo is directly connected to the EZ-B. servo Vcc and GND are both fed by these power distributors. Result: During EZ-B initialisation all servos are switched off - to be activated via toggle switches as required. Of course, all servos need to be positioned adequately beforehand. Currently, the hexapod is looking like this (together with his silent friend).


Programming was done in Synthiam BLOCKLY; surprisingly, the final version was completed within two days only !
Upcoming activities: First steps in the garden (Forward direction). Then: Backward, Turns, Sideways.
So long, that’s it for today,
Cheers
Volker
Discover more robots

Sweetn8's Teddy Ruxpin And Grubby

DJ's Voice Recognition Robot


I went back and edited my post, I don't know if mars thinner atmosphere is offset by the lower gravitational force enough to fly a traditional earth drone so I will trust your expertise.
Nink, you are sooo right !
I forgot to mention that gravity on Mars is helping by a factor of 3 ! !
By the way ... celestial objects with a more dense atmosphere are welcome targets for conventional multicopters.
NASA JPL is working on a copter for Saturn's moon Titan --> NASA JPL Dragonfly
A totally autonomous flying robot; a dream to come true ! !
@ DJ: Corrrrrrrrect; you as a man of business and myself as an independent gentleman.
Hi DJ,
is there any chance to reduce the EZ-B loudspeker volume ?
It is always screaming so loudly that it "successfully connected to the net".
Reduced volume would really be appreciated;
thanks in advance !
Are you referring to the ezrobot ezb v4 default voice acknowledgments? I don’t think the volume can be adjusted for default phrases. Maybe contact ezrobot, who is the manufacturer, and see if that’s something they’d consider as a feature upgrade in a new version.
I took the ez-b out of the developer kit doc and soldered on a power cable and fuse and external speaker. This way it uses less space and you can do what you want with the audio.
this may have voided my warranty though
Since my EZ-B is now semi-permanently fixed (double sticker), I will take it as it is.
Thanks anyhow and
have a COMFORTABLE and ENJOYABLE Christmas time - like imagined !!
Hi guys,
some news from my large insect / autonomous sensor platform.

Original layout - just the EZ-B and the servos.In order to be able to get enough equipment on board, a second deck was added to the structure, mounted on top of the inner servo mounts:

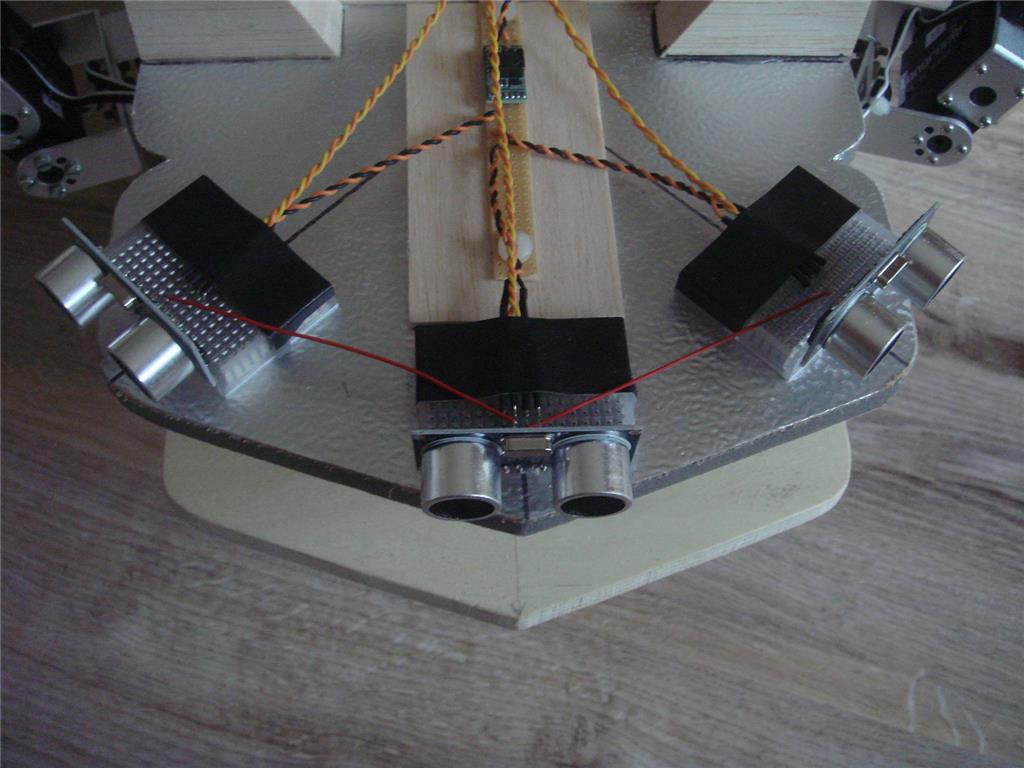
Second deck with ultrasonics in front area.Material: Aluminium-foam-aluminium sandwich (10 mm thick), since it needs to be lightweight AND sturdy. Current sensors: Three ultrasonics, covering about 180 in front of the vehicle. One common trigger pulse (from DIO0) is simultaneously activating the pings of all transmitters, while the three echoes are detectd independently (fed to ADC1 through ADC3). All cables are fed through a central hatch down to the EZ-B V4. The rear of this deck is still avaliable for further equipment.

Close-up of the ultrasonics and the 5 V DC/DC converter (3 amps) in the rear . The red wires are distributing the common trigger signal to the 3 ultrasonics. Two decks might not be sufficiant; therefore a third deck was added (again made from this 10 mm sandwich material).
Third deck (still empty). Additional sensors and the receiver of a remote control will be mounted hereWell, that it's for today ...
... next activities: Mechanical front sensors (whiskers or tentacles, respectively) plus the above mentioned remote control.
So long ...
... cheers
Volker