











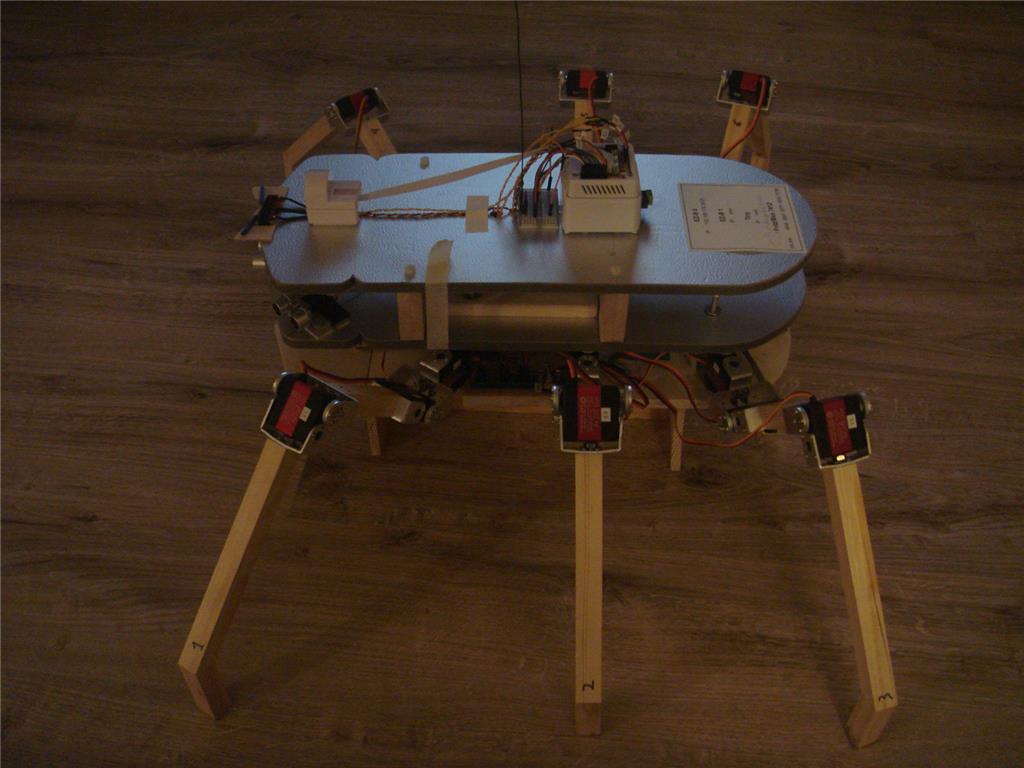




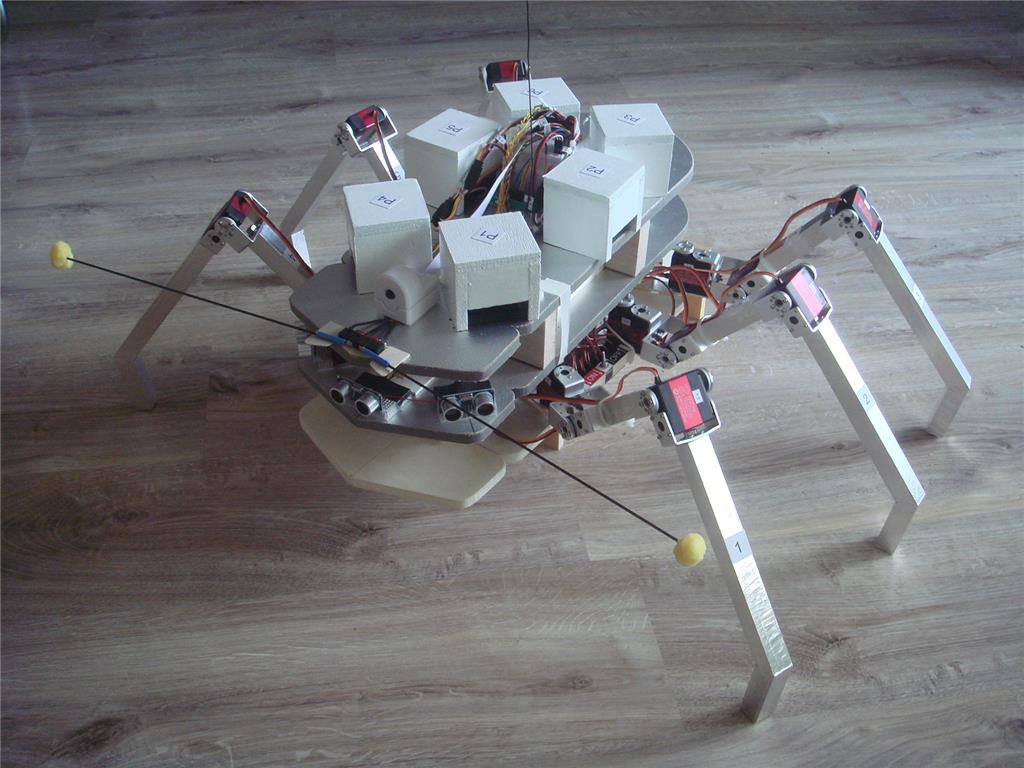

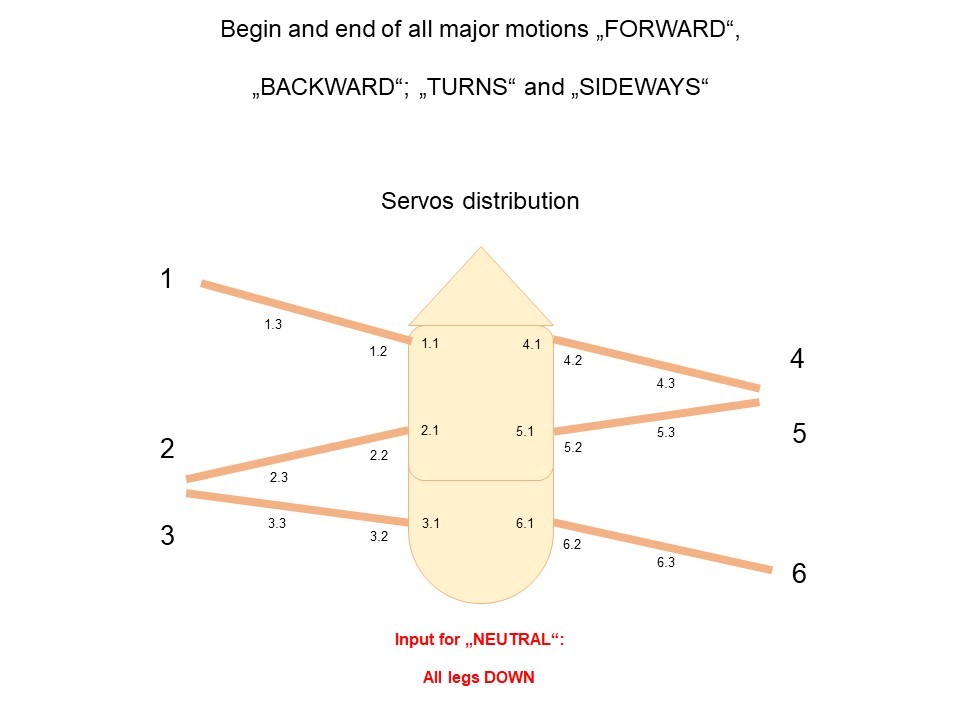
Hi guys, this is the first introducing part of a series, describing an autonomously operating hexapod with about 1 m width (my "large insect"). Idea behind this project: From early childhood on I wanted to build a kind of "mechanical turtle" or similar, being able to "survive" in the garden from spring to fall and doing whatever it would be programmed for, recharging its battery, seeking for shelter in case of rain, etc. Decades later (meanwhile a retired physicist, phd after 30+ yrs. in the space business) it was really time to realise this dream, meanwhile based on modern state-of-the-art electronics and software. Then, a colleague suggested to acquire an EZ-B V4-2 as the core element for such an undertaking and from thereon things picked up speed quite rapidly. As mentioned above, goal is the realisation of a quite large autonomous hexapod. The figure below is illustrating the general shape of this robot as well as the nomenclature for the legs (1, 2, , 6) and the servos (1.1, 1.2, , 6.3), respectively.

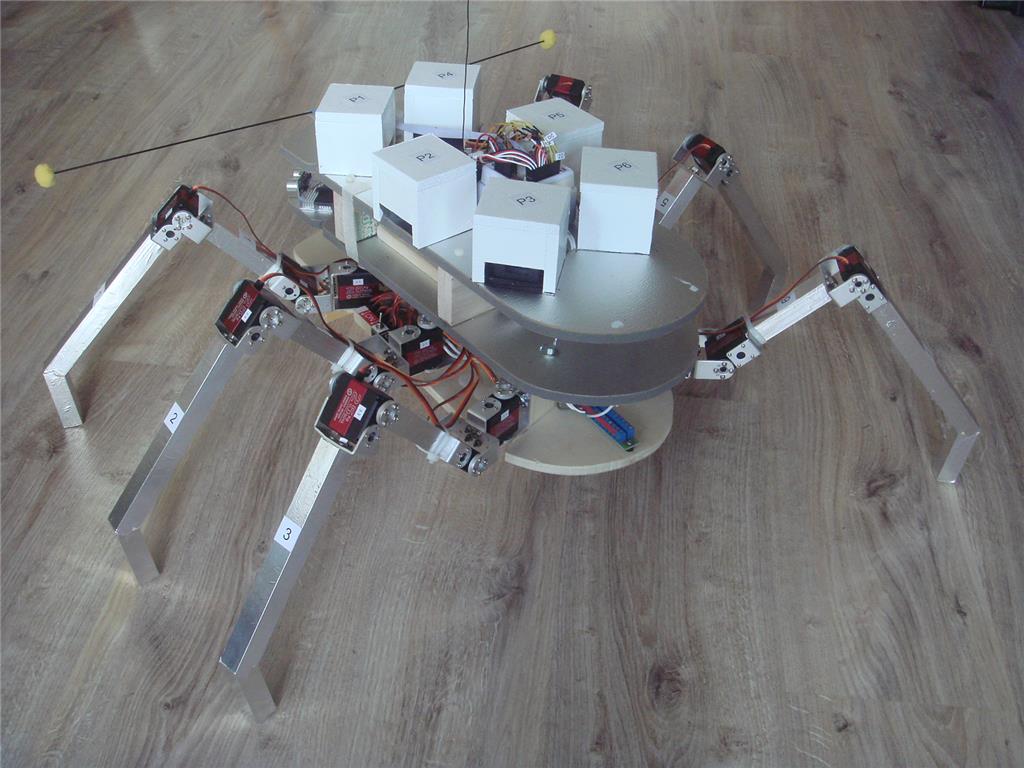
The base plate is made from 10 mm plywood and the legs from 20 mm x 20 mm pine wood. servo base blocks: 20 mm pine wood. A further light weighted plate (2nd floor) will be added later for accommodation of a scanning lidar, etc.. The hexapod’s legs are moved by 18 servos (Longrunner B07K68MK3Y:

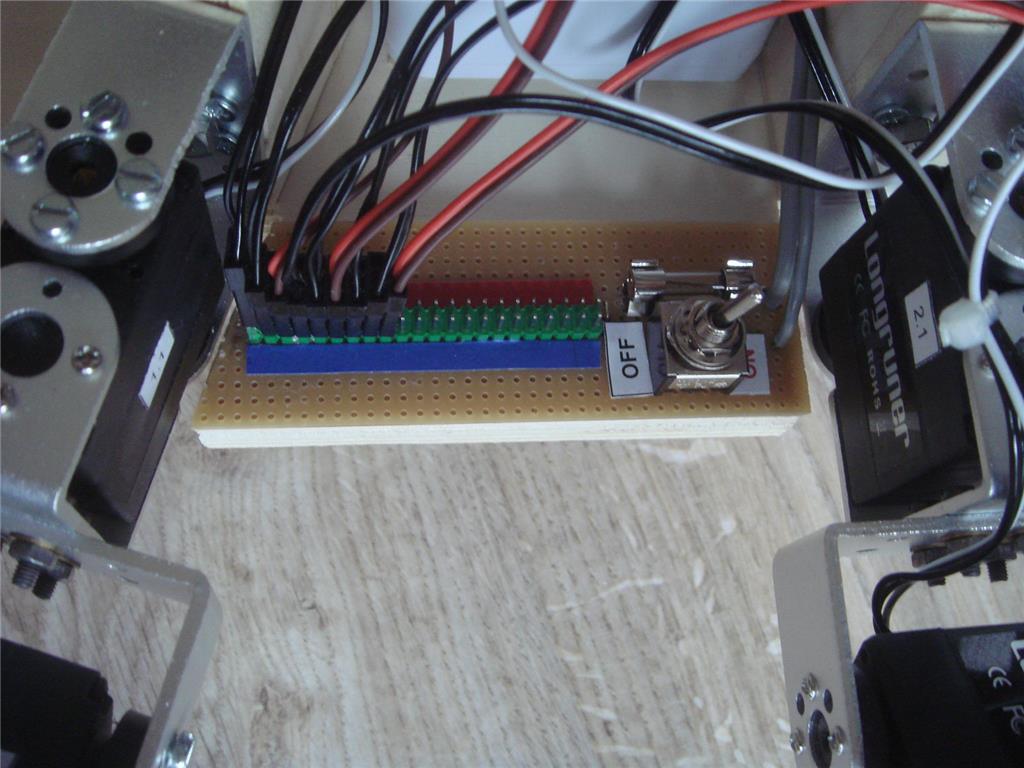
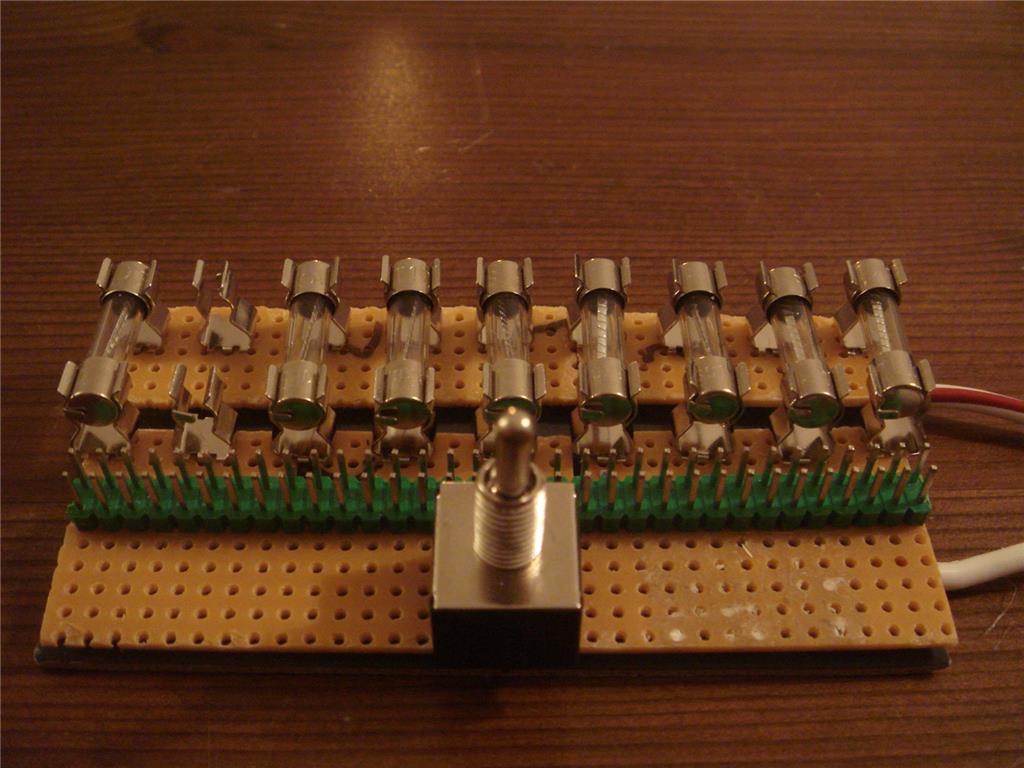
In order to suppress unwanted rapid servo motions during EZ-B initialising, a switchable power distributor was added for each side (servos 1.1 through 3.3 and servos 4.1 through 6.3, respectively). These units are served by a central 2S2P LiPo battery (10.000 mAh) and are protected by individual fuses and are galvanically connected to the EZ-B.

Only the signal pin of each servo is directly connected to the EZ-B. servo Vcc and GND are both fed by these power distributors. Result: During EZ-B initialisation all servos are switched off - to be activated via toggle switches as required. Of course, all servos need to be positioned adequately beforehand. Currently, the hexapod is looking like this (together with his silent friend).


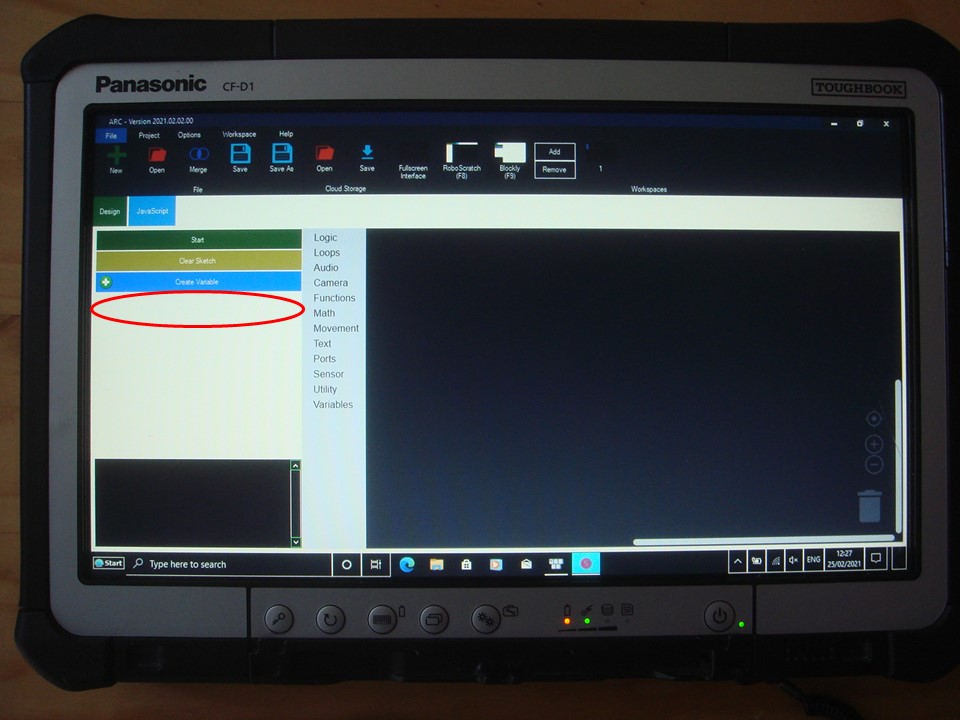
Programming was done in Synthiam BLOCKLY; surprisingly, the final version was completed within two days only !
Upcoming activities: First steps in the garden (Forward direction). Then: Backward, Turns, Sideways.
So long, that’s it for today,
Cheers
Volker
Discover more robots
Smarty's Synthiam Arm

Hexxen's Zeus - A Monowheel Robot (Work In Progress)


Good news,
the insect learned walking !
!
I will need to provide it with a set of software versions, since in grass it needs to lift up its feet more than walking on concrete.
By the end of the week I will have generated a short movie, publish it on Youtube and distribute the corresponding link.
Cheers
Volker
VIDEO !
Hi guys,
here the promised first steps of the large insect:
I have to apologise for the low video quality; still struggling with a new version of my video S/W and had to use a quite old version to get the video off the shelf.
Nevertheless, this thing is able to crawl and turn around.
It is fully understood that leg motions need to be optimised.
For the rest: See the video !
Oh my God, you are too close to it! Run away from the Replicator before it eats your face!xD
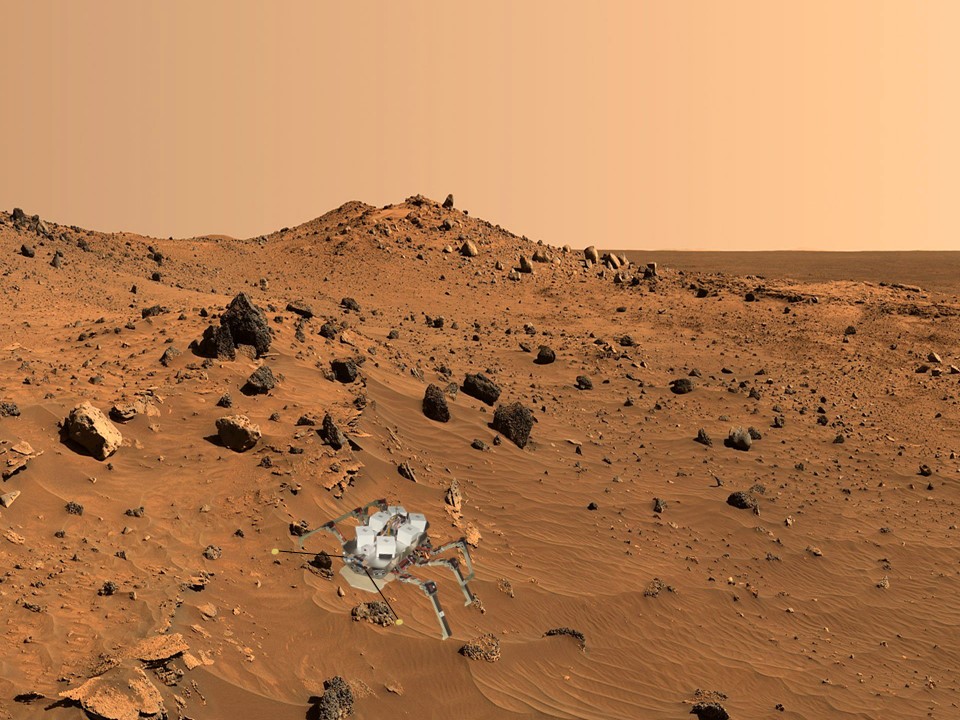
Nice work, put a cover on it, paint it silver then film it on a rocky terrain. Send the video to Elon Musk and tell him it is a prototype for the new Mars explorer and you need 100M in funding to complete the project.
Nink,
in fact I am not going to use it as an "artificial insect" anymore; this hexaod is now going to serve another application.
Reason: As physicist, phd I was working in the space industry for 30+ years and my last activity was a Mars mission study for our national space agency DLR-RFM about a swarm of autonomously operating platforms (to be launched within an international effort in the 2040ies or so).
Now, being retired, I am about building all these swarm members by my own on a small scale, just to see and learn how far one can get in realising such an ensemble by limited own funding.
The current hexapod is going to act as "the crawler" within such a swarm.
Goal: Terrestrial test campaigns in 2022 (details see below). - Low and high flying relay stations. - UAV (aerial reconnaissance) will generate images of potentially interesting spots (Points of Interest --> PoI) on the ground (later on Mars: spots with humid soil (search for life). - UAV will transmit PoI coordinates to the swarm ground members (rover, humanoid and crawler). - These units will drive to these PoI (humanoids and crawlers pickyback on a rover). - On site, these units will perform a detailed optical PoI analysis.
Swarm members:
"Lander"; a central station, represented by a Panasonic CF-D1 Toughbook. Status: Existing.

Humanoid from a colleague in northern Germany. Status: To be delivered in January 2021Rover (currently in the design phase). Status: To be finished in Winter 2021 / 2022.
High flying relay platform as substitude for a satellite (new version of a solar powered RC model); I built this one in the 1990ies; now on permanent display in the National Aerospace Museum Oberschleissheim. Status: To be finished in March 2021.
Low flying relay platform. Status: Existing.
UAV with autopilot, GPS waypoint navigation, cameras, real time video link, HUD, etc. Status: Existing.
During field campaigns in 2022 all these units shall perform realtime data exchange for simulating a small-scale Mars mission on Earth. Location: MFC Dillingen airfield.
I know, such a project is quite challenging, but extremely interesting and I will still learn a lot with my 69 years !
So, stay tuned
interesting stuff to come over the next months.
Nice collection
Nink,
sorry to say: They will work; not these conventional multicopters, but other designs.
The current NASA mission to Mars is actally carrying a small coaxial helicopter for short flights around the lander --> JPL Ingenuity.
This little device has extensively been tested inside thermal-vaccum chambers under real Mars conditions - and it hovered and flew reliably !
In fact, the density of the martian atmosphere is corresponding to some 27 km altitude on Earth; about 10 mbar. By far enough density for normal flying. One simply needs to fly fast, in order to create sufficient aerodynamic lift.
Lift = (air density/2) * speed ^2 * cl * wing area (cl = wing profile lift coefficient)
Speed for a fixed-wing UAV on Mars would be some 70 - 80 m/s.
During my study I had developed a complete aerodynamical simulator, proving these assumptions, including VTOL procedures.
I am in aerodynamics for decades now, including flying since 1973.
Wow - you're living the dream Building robots all day!
Building robots all day!