
Asked
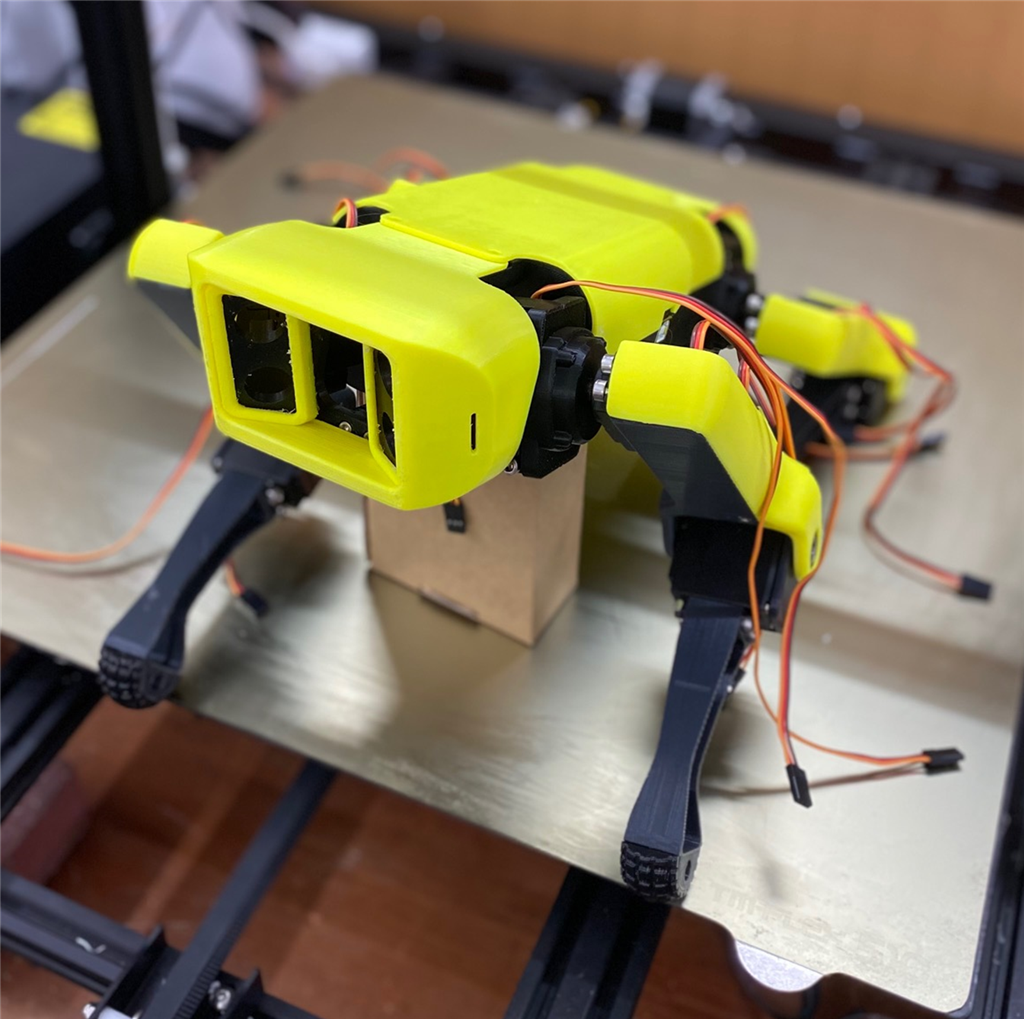
I have completed the mechanical assembly of Spot Micro. There are several versions for the controlling mechanisms used by various people. Here is a very cute one that is done with an Arduino Mega as the controller with embedded code in the Arduino. However, I have other options too such as either using a EZB V4 or a RPI with a servo Module and some reverse kinematics software.
If I decide to use the EZB V4, this is not that different than the "Six" robot in complexity (maybe). I have the parts and I am trying to determine which way to go. The kicker will be designing each step of movement with frames using ARC. I have not tried anything this complex control-wise.

Related Hardware (view all EZB hardware)

Arduino Due/Mega
by Arduino
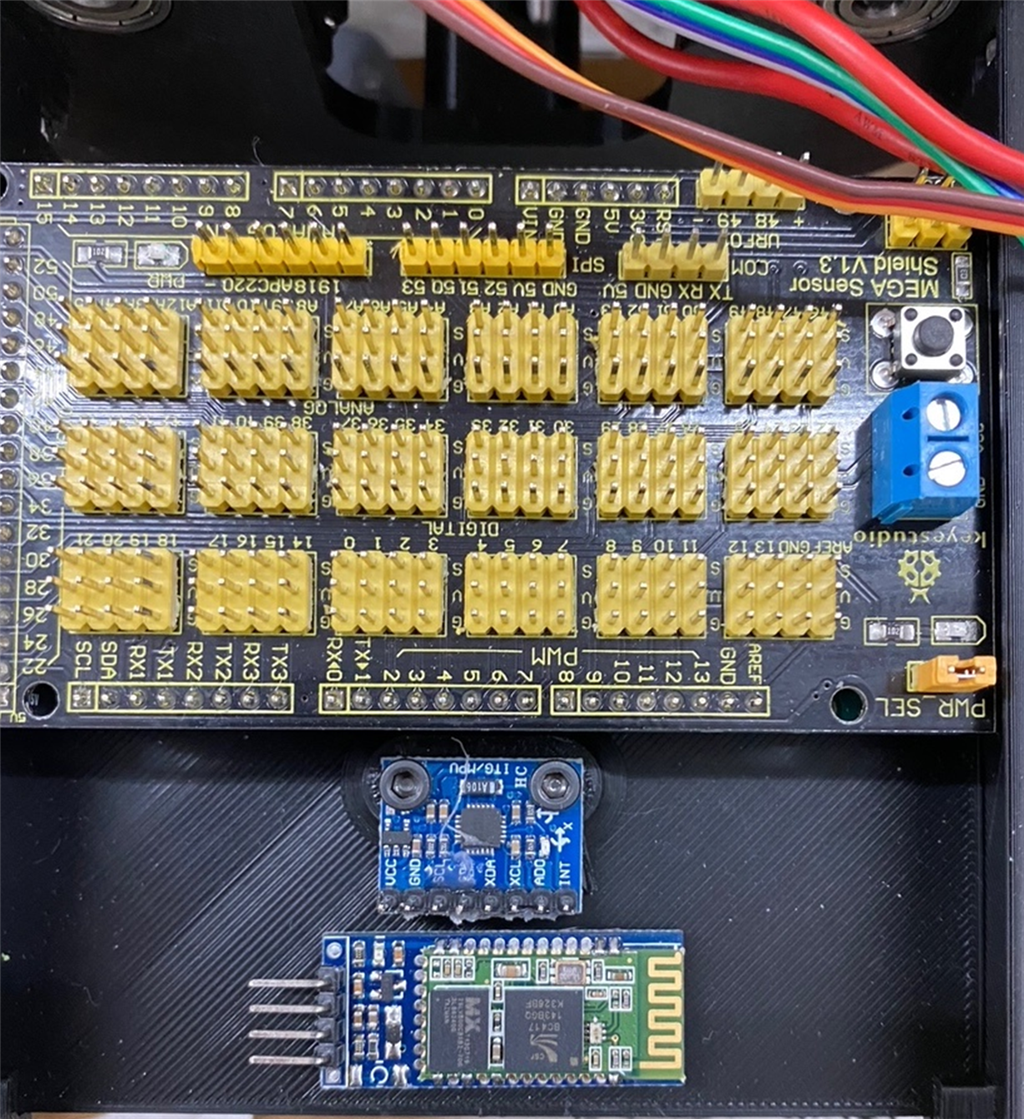
Synthiam ARC enables Arduino Mega 2560 control with 8 ADC, 13 PWM, 21 digital ports and 24 servos; includes firmware, shield and tutorials
USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
21

the Auto Position manual is a good place to start
Looking at the code, all of the positions you need are in there. The value of 0 in their code would be 90 in arc. Because they use - negative values for one way and positive for the other
That arduino code also has an IMU connected. Do you have one on the i2c port? Maybe that's why it isn't working for you. I'm guessing they use it for helping balance and such. Probably a good idea to use their code and control it via pwm from the iotiny if you can. That way you can build off the work they've already done rather than reinventing it.
mstephens 42
I was looking at nallycat model, it inspired me.

Here is walking dogI was wondering if this project is still active. I am considering making something like this.
Please see my other comment in this in the other thread. If you are looking on ways to program this or your other quad, you may want to look here. Might find something with some research.
https://hackaday.io/list/29475-walkers
Happy New Year Perry. Thanks for the info. I will check it out. It looks like a lot info is available
Nice work! One of the teams at my club, AC Robotics is also making a mini 'Spot' called Canis.