Asked
Which Way Should I Go For Spot Micro?
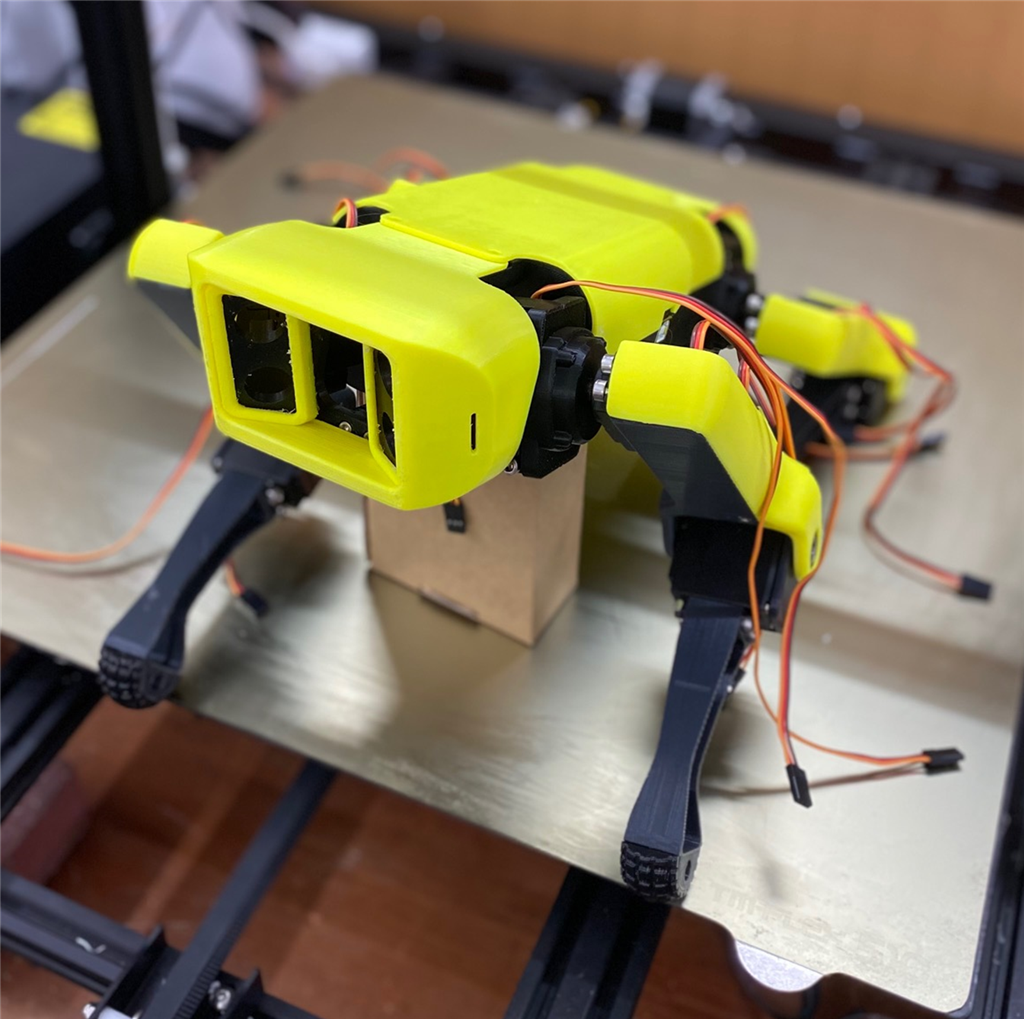
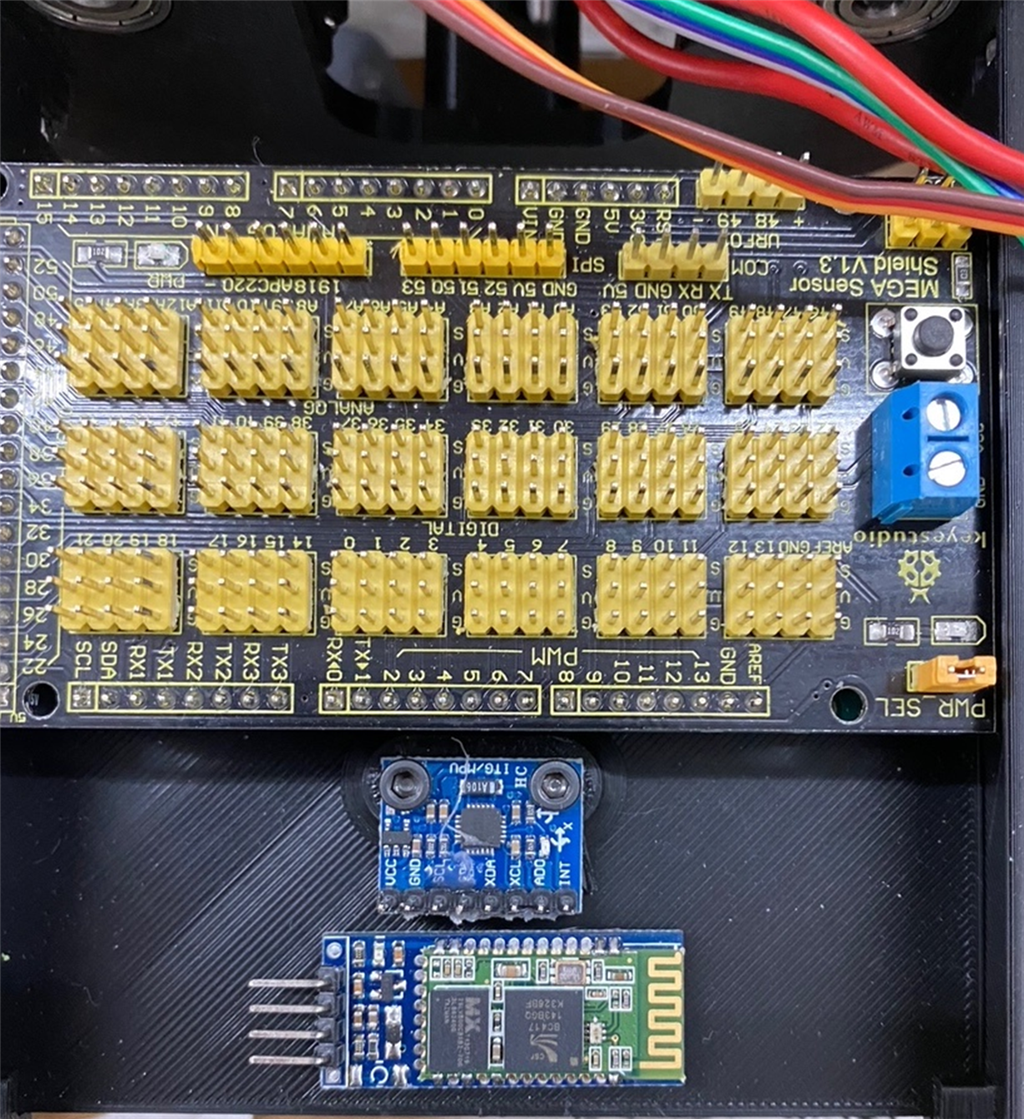
I have completed the mechanical assembly of Spot Micro. There are several versions for the controlling mechanisms used by various people. Here is a very cute one that is done with an Arduino Mega as the controller with embedded code in the Arduino. However, I have other options too such as either using a EZB V4 or a RPI with a servo Module and some reverse kinematics software.
If I decide to use the EZB V4, this is not that different than the "Six" robot in complexity (maybe). I have the parts and I am trying to determine which way to go. The kicker will be designing each step of movement with frames using ARC. I have not tried anything this complex control-wise.

Related Hardware (view all EZB hardware)

Arduino Due/Mega
by Arduino
Synthiam ARC enables Arduino Mega 2560 control with 8 ADC, 13 PWM, 21 digital ports and 24 servos; includes firmware, shield and tutorials
USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
21

Is that little guy big enough to carry an EZB V4? Would an IoTiny fit better and have enough ports? You could also flash that Mega into an EZB.
EDIT: looks liek you need 12 servos. IoTiny only has 8 digital ports. Your mega would do the trick if you flashed it into an EZB.
One of the ideas is to use the ardunio with their code and control it from an ezb v4 or iotiny. This allows you to use their existing gait movements without making new ones.
Their arduino code would need a modification if it doesn’t accept serial commands to move directions. But I’m guessing it does. Do you have a link to their arduino source code?
JD, I like this idea. There are several sources. I don't know which is best to start with:
https://github.com/lulersoft/spotmicro-controller
https://github.com/MatthiasWM/SpotMicro
I will try to e-mail you the INO file for Max (Spot Micro) I also translated from Dutch.
Most are setup to use a gaming joystick connected via Bluetooth.
Looks like the first one is the best to use. It seems to accept serial commands for movements
Cool. I think I have another io tiny as well I could use instead of the EZB V4. Thanks for you help DJ!
I’ll take a better look at the code and see what the commands are
hi all
this guy is making one .maybe is something for you?
DJ, Did you have a chance to look at the Code to see how I/we can implement the hooks? Once I get this one done, I would like to offer it up as a spotlight for you. Any guidance or examples that you can provide would be great. It seems to me that what I want to do is have the ability to mimic the bluetooth connections and controls via the PS2 joystick via the IOtiny.
Also, I want to be able to read ultra sonic sensor data either from the Arduino/IO tiny. I would like to eventually integrate a camera too in the nose- that would be direct to the IO tiny. How do you connect the IO Tiny to the Arduino?
I will build a mobile screen app on top of it all using ARC.