
Asked
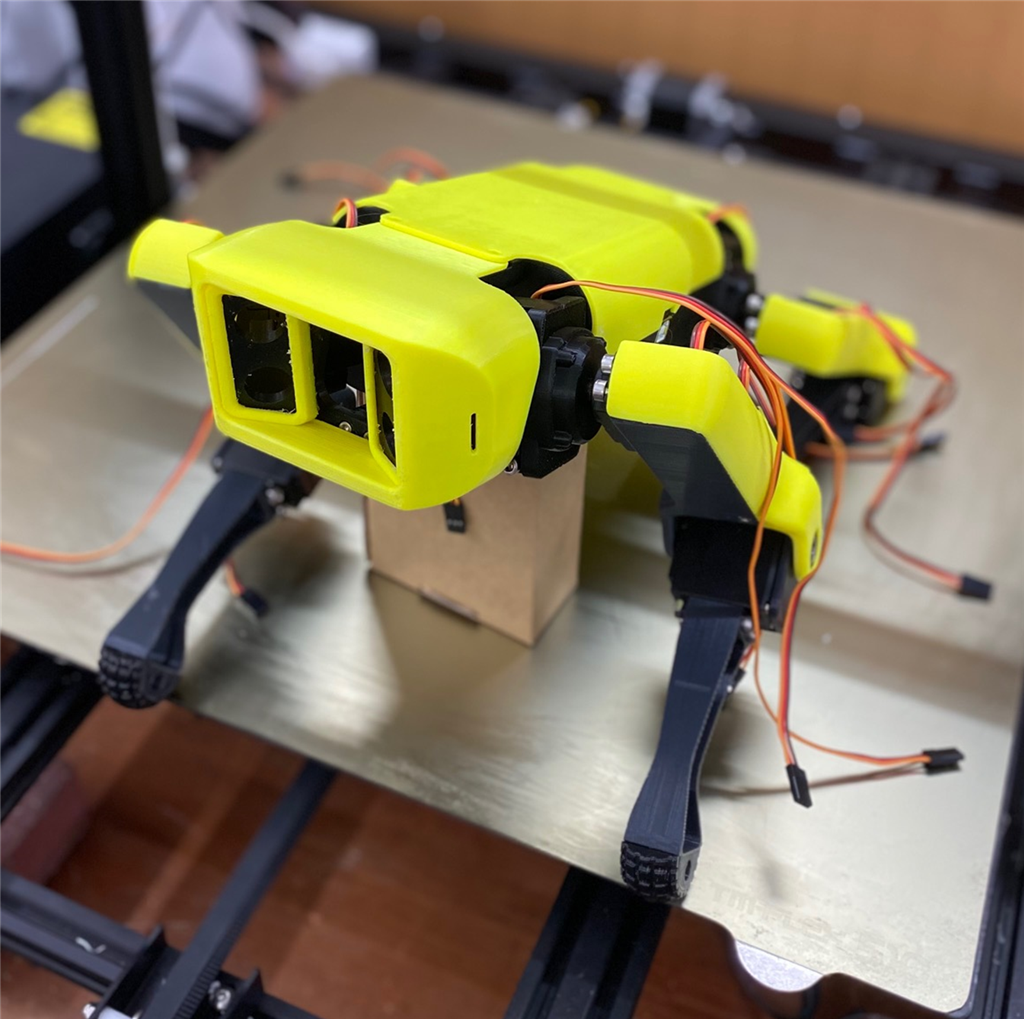
I have completed the mechanical assembly of Spot Micro. There are several versions for the controlling mechanisms used by various people. Here is a very cute one that is done with an Arduino Mega as the controller with embedded code in the Arduino. However, I have other options too such as either using a EZB V4 or a RPI with a servo Module and some reverse kinematics software.
If I decide to use the EZB V4, this is not that different than the "Six" robot in complexity (maybe). I have the parts and I am trying to determine which way to go. The kicker will be designing each step of movement with frames using ARC. I have not tried anything this complex control-wise.

Related Hardware (view all EZB hardware)

Arduino Due/Mega
by Arduino
Synthiam ARC enables Arduino Mega 2560 control with 8 ADC, 13 PWM, 21 digital ports and 24 servos; includes firmware, shield and tutorials
USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
21

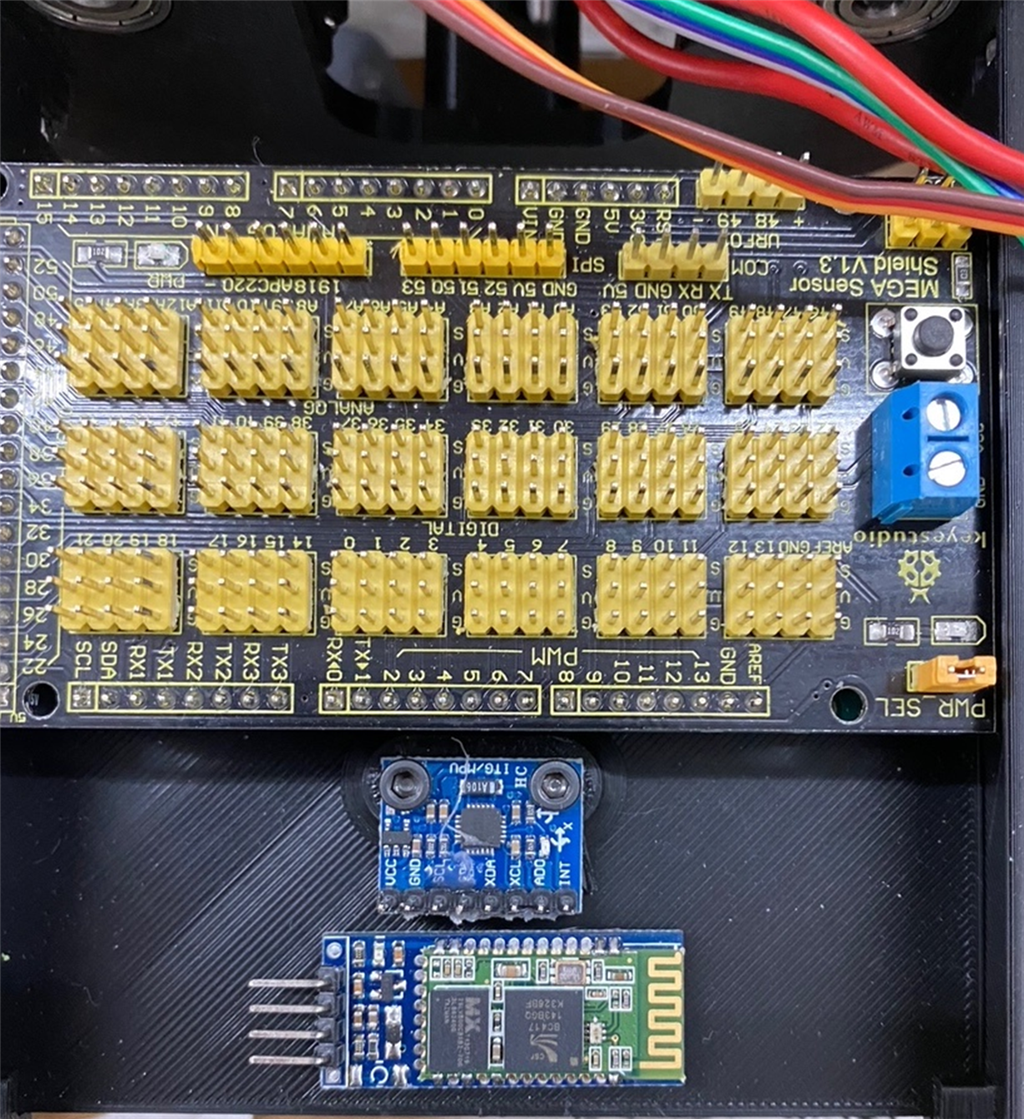
DJ, Here is INO file for Max (Spot Micro) that I translated some comments from Dutch to English where needed. It appears this approach uses 4 analog inputs on the Arduino from a RC Controller receiver Output. I am wondering if one setup the IO Tiny to output 4 PWM signal outputs if it could simulate the RC receiver outputs and use the same code base in the Arduino Mega.
Looking at the code, your pwm idea would work fine. The ideal solution in the long term would be to modify that code for digital commands. But the pwm will work to get you up and running.
The code is pretty messy. Lots of spaghetti IF conditions that could have been grouped together. So modifying that kind of piecemeal code is difficult lol
EZB 4V is pretty compact when you take it out of the case you just need to solder power connector on it. I use them in a couple of robots this way.
DJ, I have wired an IO Tiny D0, D1,D2, and D3 to the Arduino A0,A1,A2, and A3 in each case - ground to ground, voltage to voltage and signal to signal on each channel This is a very rudimentary question. I have been trying to send a PWM signal from the IO Tiny to the Arduino on each channel to mimic the RC radio receiver output. Can you give me an example code snippet of how you would do it? I am not sure I know what I am doing.
Nink/DJ, I am seriously thinking about that next - booting the Arduino mega and just take my EZB V4 and use it. I would have to start all over with teaching the robot the walking gates - but that could be fun in the end.
I have included a photo of my attempt...
looks great.
Here is the code from my 19 DOF biped I used to make it walk.
oh yeah there isn’t any code because I used an EZB and a movement panel.
:)
Nink, Is your project code posted public ally on the cloud drive?
Make sure you have a GND connected between the two
You send PWM with the pwm command (i'm guessing you are using ezscript): https://synthiam.com/Support/ez-script-api/ezscript
DJ, I tried that. But the arduino code must have been misbehaving. Anyway, I booted the whole approach and moved right over the the EZBV4! Got the servo profiles setup and spot on his feet.
What tutorial do you recommend for using the frame approach for the servo motions?