
Asked
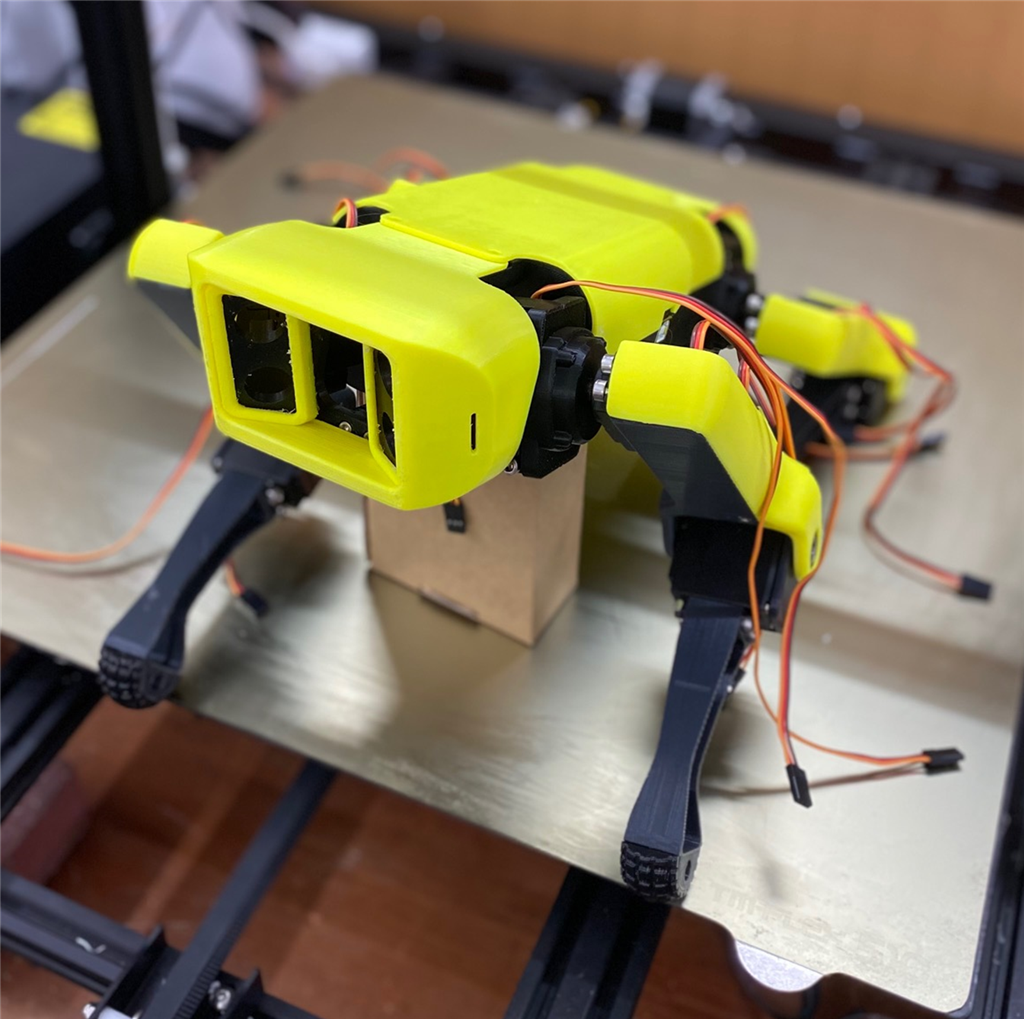
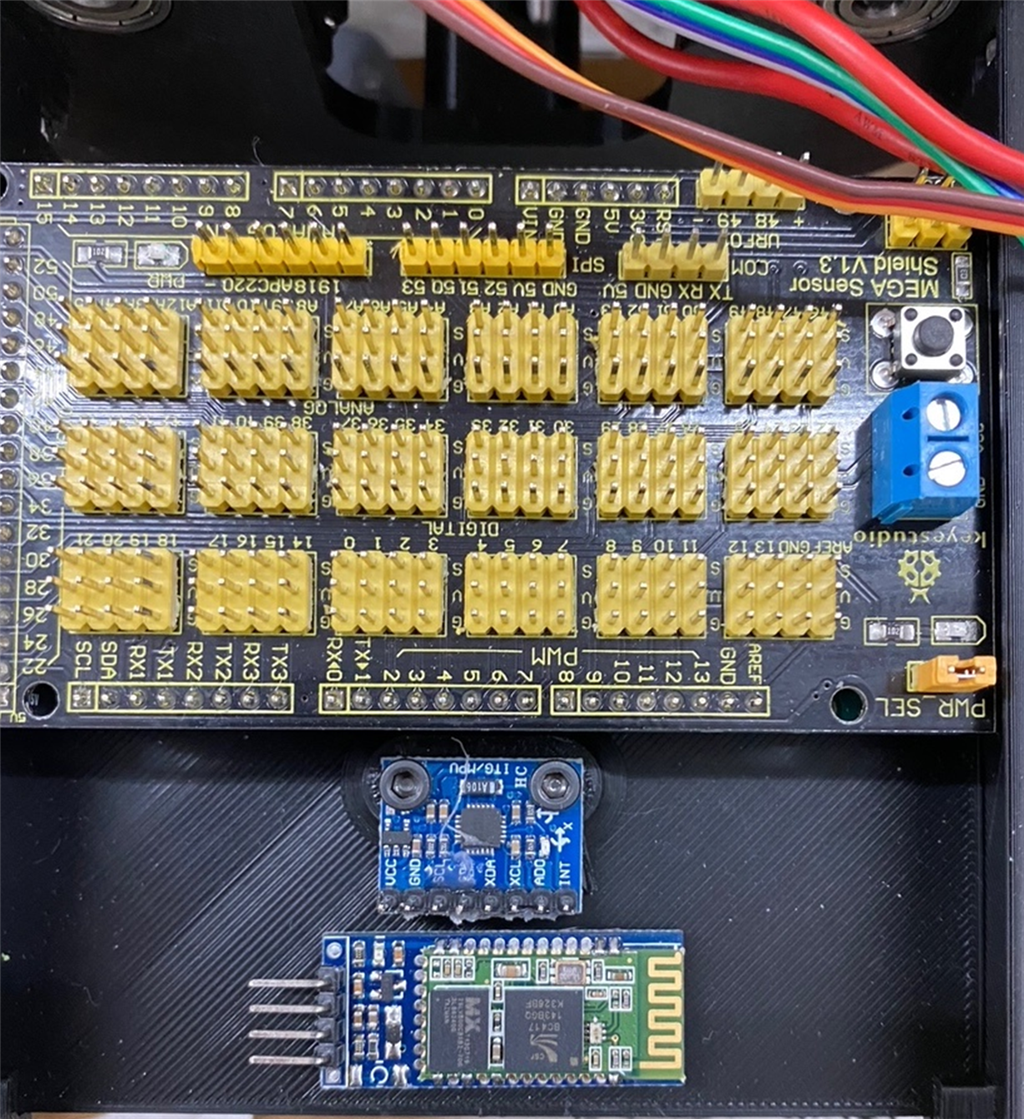
I have completed the mechanical assembly of Spot Micro. There are several versions for the controlling mechanisms used by various people. Here is a very cute one that is done with an Arduino Mega as the controller with embedded code in the Arduino. However, I have other options too such as either using a EZB V4 or a RPI with a servo Module and some reverse kinematics software.
If I decide to use the EZB V4, this is not that different than the "Six" robot in complexity (maybe). I have the parts and I am trying to determine which way to go. The kicker will be designing each step of movement with frames using ARC. I have not tried anything this complex control-wise.

Related Hardware (view all EZB hardware)

Arduino Due/Mega
by Arduino
Synthiam ARC enables Arduino Mega 2560 control with 8 ADC, 13 PWM, 21 digital ports and 24 servos; includes firmware, shield and tutorials
USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
21

It was a nice hot day in Toronto yesterday so I had a few beers on the deck.
woke up this morning and I found this on my work bench. A couple of JD’s had been sacrificed to the robot gods.
I guess I can clean it up and throw some code down.
Let’s call it JDog.
Hahaha oh my - those must have been good beers. I spit out my milk and laughed at that thing. Bet it walks great and is very stable. Just kinda caught me off guard